车辆事故检测方法、装置、存储介质、车辆和监控端与流程
本技术涉及车辆,特别是涉及一种车辆事故检测方法、装置、存储介质、车辆和监控端。
背景技术:
1、随着车联网的发展,各类车辆数据的获取变得越来越容易,如何利用车联网数据进行车辆事故检测,成为了一个重要的研究方向。
2、目前,针对车辆事故检测通常是基于单一的数据源或者传统的机器学习算法,如决策树、支持向量机等。然而由于车辆行驶的状态和环境的复杂性,单一的检测方法难以充分利用数据量大且数据类型繁多的车联网数据,导致识别车辆行驶事故的准确率较低。
技术实现思路
1、本技术提供一种车辆事故检测方法、装置、存储介质、车辆和监控端,以解决目前单一的检测方法难以充分利用数据量大且数据类型繁多的车联网数据,导致识别车辆行驶事故的准确率较低的问题。
2、为了解决上述问题,本技术采用了以下的技术方案:
3、第一方面,本技术实施例提供了一种车辆事故检测方法,所述方法包括:
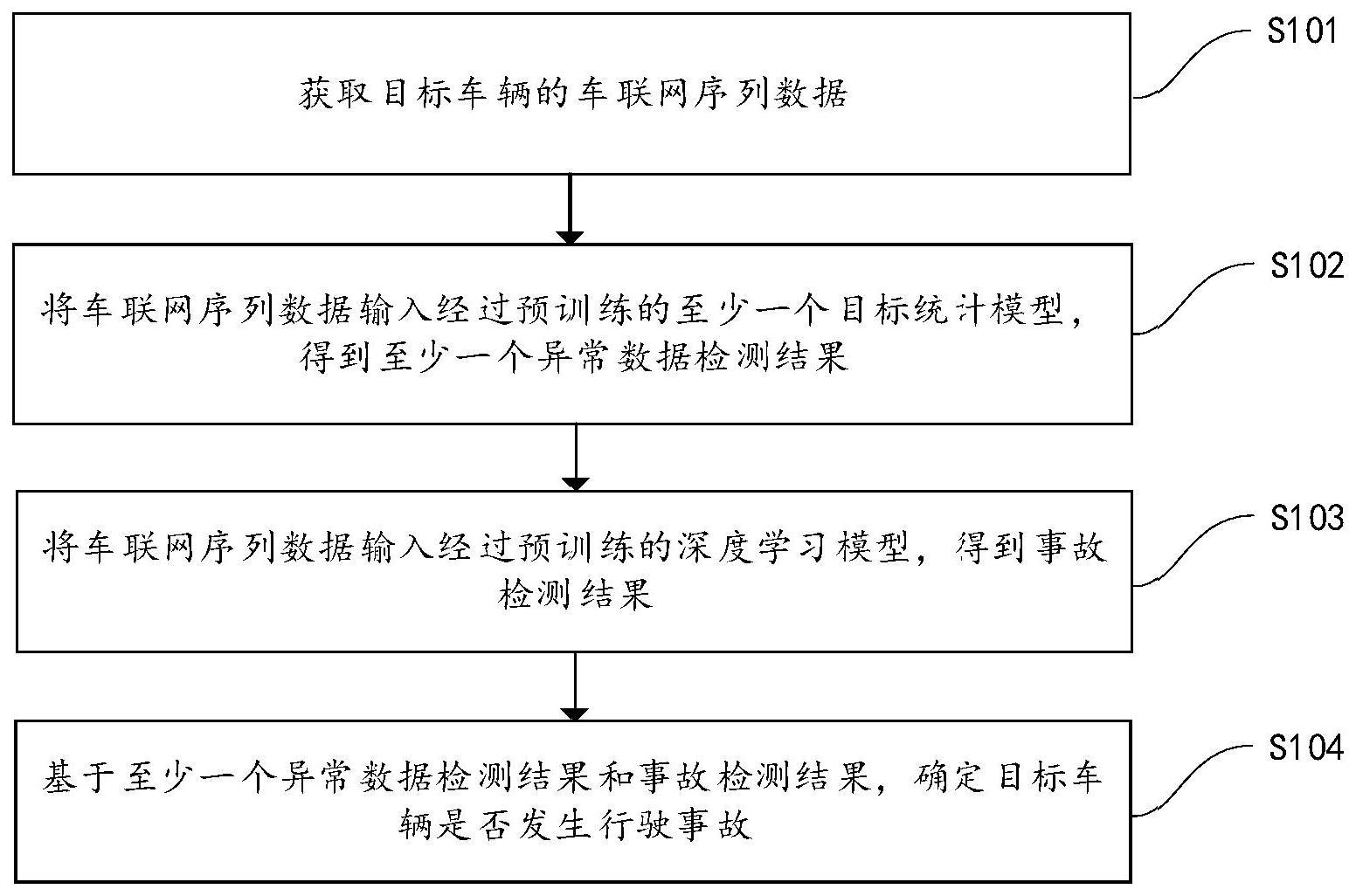
4、获取目标车辆的车联网序列数据;
5、将所述车联网序列数据输入经过预训练的至少一个目标统计模型,得到至少一个异常数据检测结果;不同的目标统计模型用于检测不同数据类型的异常行驶数据;
6、将所述车联网序列数据输入经过预训练的深度学习模型,得到事故检测结果;
7、基于所述至少一个异常数据检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故。
8、在本技术一实施例中,所述至少一个目标统计模型包括加速度异常检测模型、方向盘转速异常检测模型和/或停车行为异常检测模型;所述至少一个异常数据检测结果包括加速度异常检测结果、方向盘转速异常检测结果和/或停车行为异常检测结果;
9、将所述车联网序列数据输入至少一个目标统计模型,得到至少一个异常数据检测结果的步骤,包括:
10、基于所述车联网序列数据,得到加速度序列数据、方向盘转速序列数据和/或停车行为序列数据;
11、将所述加速度序列数据输入所述加速度异常检测模型,,输出得到所述加速度异常检测结果;和/或,
12、将所述方向盘转速序列数据输入所述方向盘转速异常检测模型,输出得到所述方向盘转速异常检测结果;和/或,
13、将所述停车行为序列数据输入所述停车行为异常检测模型,输出得到所述停车行为异常检测结果。
14、在本技术一实施例中,将所述车联网序列数据输入深度学习模型,得到事故检测结果的步骤,包括:
15、基于所述车联网序列数据,得到车速序列数据、加速度序列数据和方向盘转速序列数据;
16、将所述车速序列数据、所述加速度序列数据和所述方向盘转速序列数据输入所述深度学习模型,得到所述事故检测结果。
17、在本技术一实施例中,基于所述至少一个异常数据检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故的步骤,包括:
18、确定所述加速度异常检测结果的第一检测时间、所述方向盘转速异常检测结果的第二检测时间、所述停车行为异常检测结果的第三检测时间和所述事故检测结果的第四检测时间;
19、在所述第一检测时间、第二检测时间、第三检测时间和第四检测时间满足预设条件的情况下,基于所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故。
20、在本技术一实施例中,在所述第一检测时间、第二检测时间、第三检测时间和第四检测时间满足预设条件的情况下,基于所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故的步骤之前,所述方法还包括:
21、在所述第一检测时间和第二检测时间早于所述第四检测时间且所述第四检测时间早于所述第三检测时间的情况下,确定所述第一检测时间、第二检测时间、第三检测时间和第四检测时间满足所述预设条件。
22、在本技术一实施例中,基于所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故的步骤,包括:
23、对所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果进行加权求和,得到事故评分值;
24、在所述事故评分值大于评分阈值的情况下,确定所述目标车辆发生行驶事故。
25、在本技术一实施例中,所述至少一个目标统计模型和所述深度学习模型是通过以下方式训练得到:
26、针对任一所述目标统计模型,基于所述目标统计模型用于检测的异常行驶数据的目标数据类型,从历史车联网序列数据中提取所述目标数据类型的目标数据序列;
27、为所述目标数据序列和所述历史车联网序列数据标注事故标签,分别得到第一模型训练样本和第二模型训练样本;所述事故标签包括是否发生事故以及事故发生时刻;
28、通过所述第一模型训练样本,对初始统计模型进行训练,得到所述目标统计模型;
29、通过所述第二模型训练样本,对初始深度学习模型进行训练,得到所述深度学习模型。
30、第二方面,基于相同发明构思,本技术实施例提供了一种车辆事故检测装置,所述装置包括:
31、数据获取模块,用于获取目标车辆的车联网序列数据;;
32、第一检测模块,用于将所述车联网序列数据输入至少一个目标统计模型,得到至少一个异常数据检测结果;不同的目标统计模型用于检测不同数据类型的异常行驶数据;
33、第二检测模块,用于将所述车联网序列数据输入深度学习模型,得到事故检测结果;
34、事故确定模块,用于基于所述至少一个异常数据检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故。
35、在本技术一实施例中,所述至少一个目标统计模型包括加速度异常检测模型、方向盘转速异常检测模型和/或停车行为异常检测模型;所述至少一个异常数据检测结果包括加速度异常检测结果、方向盘转速异常检测结果和/或停车行为异常检测结果;所述第一检测模块包括:
36、第一数据提取子模块,用于基于所述车联网序列数据,得到加速度序列数据、方向盘转速序列数据和/或停车行为序列数据;
37、加速度检测子模块,用于将所述加速度序列数据输入所述加速度异常检测模型,输出得到所述加速度异常检测结果;
38、方向盘转速检测子模块,用于将所述方向盘转速序列数据输入所述方向盘转速异常检测模型,输出得到所述方向盘转速异常检测结果;
39、停车行为检测子模块,用于将所述停车行为序列数据输入所述停车行为异常检测模型,输出得到所述停车行为异常检测结果。
40、在本技术一实施例中,所述第二检测模块包括:
41、第二数据提取子模块,用于基于所述车联网序列数据,得到车速序列数据、加速度序列数据和方向盘转速序列数据;
42、事故检测子模块,用于将所述车速序列数据、所述加速度序列数据和所述方向盘转速序列数据输入所述深度学习模型,得到所述事故检测结果。
43、在本技术一实施例中,所述事故确定模块包括:
44、检测时间确定子模块,用于确定所述加速度异常检测结果的第一检测时间、所述方向盘转速异常检测结果的第二检测时间、所述停车行为异常检测结果的第三检测时间和所述事故检测结果的第四检测时间;;
45、事故确定子模块,用于在所述第一检测时间、第二检测时间、第三检测时间和第四检测时间满足预设条件的情况下,基于所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果,确定所述目标车辆是否发生行驶事故。
46、在本技术一实施例中,所述车辆事故检测装置还包括::
47、条件确定模块,用于在所述第一检测时间和第二检测时间早于所述第四检测时间且所述第四检测时间早于所述第三检测时间的情况下,确定所述第一检测时间、第二检测时间、第三检测时间和第四检测时间满足所述预设条件。
48、在本技术一实施例中,所述事故确定子模块包括:
49、加权求和单元,用于对所述加速度异常检测结果、所述方向盘转速异常检测结果、所述停车行为异常检测结果和所述事故检测结果进行加权求和,得到事故评分值;
50、事故确定单元,用于在所述事故评分值大于评分阈值的情况下,确定所述目标车辆发生行驶事故。
51、在本技术一实施例中,所述车辆事故检测装置还包括模型训练模块,所述模型训练模块包括:
52、第三数据提取子模块,用于针对任一所述目标统计模型,基于所述目标统计模型用于检测的异常行驶数据的目标数据类型,从历史车联网序列数据中提取所述目标数据类型的目标数据序列;
53、数据标注子模块,用于为所述目标数据序列和所述历史车联网序列数据标注事故标签,分别得到第一模型训练样本和第二模型训练样本;所述事故标签包括是否发生事故以及事故发生时刻;
54、第一模型训练子模块,用于通过所述第一模型训练样本,对初始统计模型进行训练,得到所述目标统计模型;
55、第二模型训练子模块,用于通过所述第二模型训练样本,对初始深度学习模型进行训练,得到所述深度学习模型。
56、第三方面,基于相同发明构思,本技术实施例提供了一种存储介质,所述存储介质内存储有机器可执行指令,所述机器可执行指令被处理器执行时实现本技术第一方面提出的车辆事故检测方法。
57、第四方面,基于相同发明构思,本技术实施例提供了一种车辆,包括车辆事故检测系统,所述车辆事故检测系统用于执行本技术第一方面提出的车辆事故检测方法。
58、第五方面,基于相同发明构思,本技术实施例提供了一种监控端,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的机器可执行指令,所述处理器用于执行机器可执行指令,以实现本技术第一方面提出的车辆事故检测方法。
59、与现有技术相比,本技术包括以下优点:
60、本技术实施例提供的一种车辆事故检测方法,通过获取目标车辆的车联网序列数据,并将车联网序列数据输入至少一个目标统计模型,能够得到至少一个异常数据检测结果,同时将车联网序列数据输入经过预训练的深度学习模型,能够得到事故检测结果,进而基于至少一个异常数据检测结果和事故检测结果,能够确定目标车辆是否发生行驶事故。本技术实施例通过目标统计模型,能够实现车联网序列数据中多种数据类型的异常行驶数据的有效识别,同时结合深度学习模型,从多个角度对车联网序列数据进行事故分析,实现对数据类型繁多的大量车联网数据的充分利用,在提高算法鲁棒性的同时,有效提高车辆事故检测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!