基于混沌优化NSGA-Ⅱ算法的机动多目标数据关联与跟踪方法与流程
本发明涉及多目标数据关联与跟踪,特别是一种基于混沌优化nsga-ⅱ算法的机动多目标数据关联与跟踪方法。
背景技术:
1、数据关联是多目标跟踪问题的关键问题和难点步骤之一。所谓数据关联,就是将多个量测与多个目标进行正确精准的匹配,保证目标数据互联的准确性。但随着战场节奏的加快,对目标关联与跟踪的实时性和准确性要求不断加强,同时,随着科学材料的迅猛发展以及新技术快速崛起,雷达跟踪目标的机动性越来越强、种类越来越复杂、运动状态也更加复杂,这就使得多目标数据关联与航迹跟踪技术要更具灵活性以适应各方面的变化。特别是在复杂环境下,当目标数量较多时会使得目标和回波之间的关联假设增多,可能出现计算量的组合爆炸问题;当目标机动性较强时可能出现交叉、分叉,容易出现误跟、失跟现象。因此,进一步深入探讨目标和雷达量测之间的关联问题仍是当今军事领域的强烈需求。
2、国内外研究者对数据关联算法进行了深入探索,如最近邻法(nnda),该算法仅仅依靠距离对量测数据和目标进行配对,该方法原理简单,但可靠性低,较容易引起错误关联;延迟决策多假设法(mht),该算法将所有量测通过遍历方式与已存在的每条航迹进行配对,并将关联概率最大的量测作为最佳匹配。该方法操作简单、准确度高,但若跟踪目标数量越多,其计算量也将成倍增加,不能实现实时跟踪;联合概率数据关联法(jpda),该方法基于贝叶斯理论,给定每个候选观测不同的关联权值,并将所有量测都用于航迹更新。但计算复杂度会随着目标数量增加而剧增。其次,近年来,随着诸多仿生优化算法如:遗传算法、神经网络、蚁群算法等以及以它们为基础的迭代更新算法,也在多目标数据关联与跟踪领域进行了一系列创新和突破。但在实际使用中,会出现陷入局部最优、收敛速度慢、依赖于先验信息等问题。与当前战场的实际需求存在一定的距离。因此,如何准确、可靠和快速地进行机动多目标的数据关联与跟踪,需要继续深入研究。
技术实现思路
1、鉴于此,本发明提供一种基于混沌优化nsga-ⅱ算法的机动多目标数据关联与跟踪方法,以解决上述技术问题。
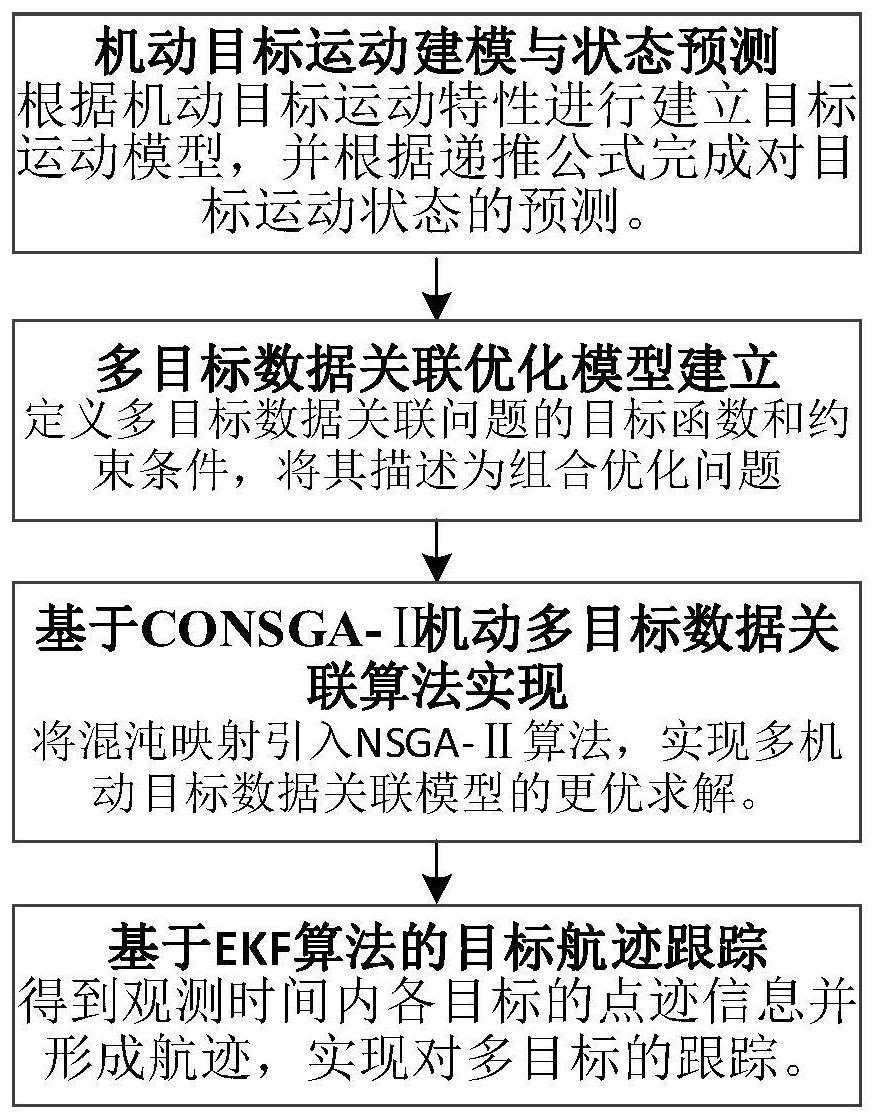
2、本发明公开了一种基于混沌优化nsga-ⅱ算法的机动多目标数据关联与跟踪方法,其包括:
3、步骤1:通过机动目标运动建模与状态预测,根据目标上一时刻的运动状态信息得到目标在下一时刻的运动状态信息预测结果;
4、步骤2:建立机动多目标数据关联优化模型;
5、步骤3:通过混沌理论改进nsga-ⅱ算法,并利用改进后得到的consga-ⅱ算法对机动多目标数据关联优化模型进行更优求解,得到多目标数据关联结果;
6、步骤4:利用多目标数据关联结果,采用ekf滤波算法完成对所有目标的航迹滤波和点迹更新。
7、进一步地,所述步骤1包括:
8、假设任意时刻k,目标运动状态向量为x(k),其对应的协方差矩阵为p(k),根据ekf算法,得到状态运动向量和协方差矩阵的一步预测结果为:
9、
10、其中,f表示状态转移矩阵,g表示过程噪声协方差矩阵,q(k)表示过程噪声;
11、若雷达的量测信息为z(k),则状态方程的一步预测可表示为:
12、z(k+1)=hx(k+1)+w(k+1) (2)
13、其中,w(k)为量测噪声,h为量测矩阵。
14、进一步地,所述步骤2包括:
15、假设在k时刻有m个目标已建立航迹信息,并预测得到k+1时刻对应航迹的预测结果为在k+1时刻,雷达观测到n个目标,其真实量测结果值为判断的最优对应关系,建立多目标数据关联组合优化化模型;其中,i=1,2…,m,j=1,2…,n。
16、进一步地,所述建立多目标数据关联组合优化化模型,包括:将k时刻m个目标的航迹结果z1(k),z2(k),…,zm(k)视为整数1,2…,m,对应的随机排列i1,i2…,im;而将k+1时刻n个目标真实量测结果值视为整数1,2…,n从小到大的排列对应的j1,j2…,jn;并用dij表示目标预测值和真实值之间的残差距离,则在k+1时刻所有目标的残差距离之和表示为:
17、
18、将式(3)作为数据关联的目标函数,并作如下假设:一个目标有且只有一个量测与之进行关联;一个量测至多与一个目标关联;得到数据关联目标函数的约束条件为n≥m;在约束条件下,当d=dmin成立时,则k+1时刻n个目标真实量测结果与m个目标的航迹结果之间的最优对应关系就是其中,i=1,2…,m,j=1,2…,n。
19、进一步地,所述步骤3包括:
20、步骤31:定义初始种群中每个染色体向量;
21、步骤32:产生初始混沌优化向量,并将其映射到决策变量n的取值范围内,即得到r(t,j);
22、步骤33:计算r(t,j)中所有向量的目标函数值,并根据目标函数值最小,选择前l个向量作为染色体向量,从而得到优化后的初始化种群qk+1;
23、步骤34:记代表初始化种群为qg,计算qg中各染色体的目标函数值;并通过双支竞标选择法随机地选择两个个体到交配池中,进行快速非支配排序和拥挤度计算;
24、步骤35:采用模拟二进制交叉算法,并以pc作为选择交叉概率进行交叉操作;采用多项式变异算法,并以pm为变异概率进行变异操作,得到子代种群pg;
25、步骤36:合并父代种群qg和子代种群pg,得到的种群zg,基于种群zg得到父代种群qg+1;
26、步骤37:通过判断迭代次数是否满足条件,若满足,则转到步骤38;若不满足,则转到步骤310;
27、步骤38:重复步骤33和步骤34,产生l个混沌向量cl;
28、步骤39:以轮盘赌方式舍去qg+1中l个染色体;并用cl混沌向量代替舍去部分,完成父代种群qg+1的更新;
29、步骤310:判断迭代次数是否小于或等于预设值;若是,则转到步骤311,否则迭代次数加1,转到步骤35;
30、步骤311:完成最优解的输出,结束consga-ⅱ算法过程。
31、进一步地,所述步骤31包括:
32、步骤311:确定初始种群参数;假设k+1时刻真实量测个数为n,预测目标数量为m个;确定种群规模为l和最大进化代数gmax;
33、步骤312:对初始种群qk+1进行定义;根据机动多目标数据关联优化模型,定义每个染色体向量为:
34、c(l,j)=randperm(n) (4)
35、其中,l=1,2,…l,c(l)表示第l个染色体;每个染色体中决策向量的维数为n,n为量测个数;randperm(·)表示随机重排函数;将c(l)中取值大于m的元素置零,表示量测对应的为虚警。
36、进一步地,所述步骤32包括:
37、步骤321:产生初始混沌优化向量;采用tent方法产生t个n维大小的混沌向量初始值,n为真实量测个数;约束混沌向量的个数t至少为染色体个数的2倍,即t≥2n;
38、
39、其中,t=1,2,…t,表示混沌向量序号;x(t)表示第t个染色体的混沌向量;定义的第t+1个混沌向量x(t+1)为:
40、
41、通过式(6),得到t个n维具有混沌特性的变量x(t,n);
42、步骤322:将混沌变量x(t,n)映射到决策变量n的取值范围内,具体映射关系如下:
43、r(t,j)=int(mxj(t,n)) j=1,2,…,n (7)
44、其中,int(·)表示取整函数,m表示预测目标数量。
45、进一步地,所述步骤36包括:
46、步骤361:合并父代种群qg对代种群pg,得到的种群zg数量规模为2l;
47、步骤362:对种群zg进行快速非支配排序和拥挤度计算,并进行排序;
48、步骤363:选取种群zg中前2l个染色体作为父代种群qg+1。
49、进一步地,所述步骤37中:判断迭代次数是否满足条件,即判断g是否等于c*gmax/50;其中,c为正整数。
50、进一步地,所述步骤4包括:
51、步骤41:计算新息协方差矩阵:
52、sn(k)=hxn(k)pn(k|k-1)(hxn(k))t+r(k) (9)
53、其中,n为目标数量,hx(k)为量测矩阵h(k)的雅格比矩阵;r(k)为量测噪声w(k)的协方差矩阵;
54、步骤42:计算卡尔曼增益:
55、kn(k)=pn(k|k-1)(hxn(k))t|sn(k)|-1 (10)
56、步骤43:更新状态向量:
57、xn(k|k)=xn(k|k-1)+kn(k)vn(k) (11)
58、步骤44:更新协方差矩阵:
59、pn(k|k)=pn(k|k-1)-kn(k)sn(k)(kn(k))t (12)
60、重复步骤41至步骤44,直至完成对所有目标的航迹滤波和点迹更新为止。
61、由于采用了上述技术方案,本发明具有如下的优点:
62、本发明通过利用混沌变量在混沌运动中所具有的遍历性、随机性、规律性,解决了nsga-ⅱ算法陷入局部最优和收敛速度慢等问题,以及传统机动多目标数据关联与跟踪算法计算量大、关联准确度不高等问题。本发明具有收敛速度快、运算效率高,鲁棒性强、算法适用性好等优点,能够高性能地对机动多目标数据关联模型进行优化,不仅可以获得较高的关联准确率,也可以有效提高关联速度,进而改善机动多目标航迹跟踪结果。
- 还没有人留言评论。精彩留言会获得点赞!