一种目标匹配方法及装置与流程
本发明涉及智慧交通,尤其涉及一种目标匹配方法及装置。
背景技术:
1、在解决关于3d多目标跟踪任务时,基于激光雷达的检测结果是不同于图像检测的。在激光雷达的目标检测任务中,目标在点云中部分特征信息更少,同时由于点云覆盖范围和分辨率的限制,3d目标检测结果的类别、位置、尺寸等特征的效度(测量与实际的吻合程度)并不高。
2、而现有的目标跟踪技术中,大多都是基于理想的3d目标检测结果而设计的,理想情况为:所有目标在每一帧数据中总能被完全检测,所有目标的检测结果精度高。但在实际的3d目标检测工作中,由于目标在拍摄视角内被遮挡、点云数据的质量、点云数据的点云密度或目标检测功能的精度等因素,目标可能在目标检测结果中连续消失一段时间再出现,或目标检测结果的尺寸效度较低,从而影响目标跟踪精度。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种目标匹配方法及装置,在匹配时将时间差异度量及形状差异度量纳入度量参数的计算,以提高目标跟踪的精度。
2、依据本发明的第一个方面,提供了一种目标匹配方法,包括:
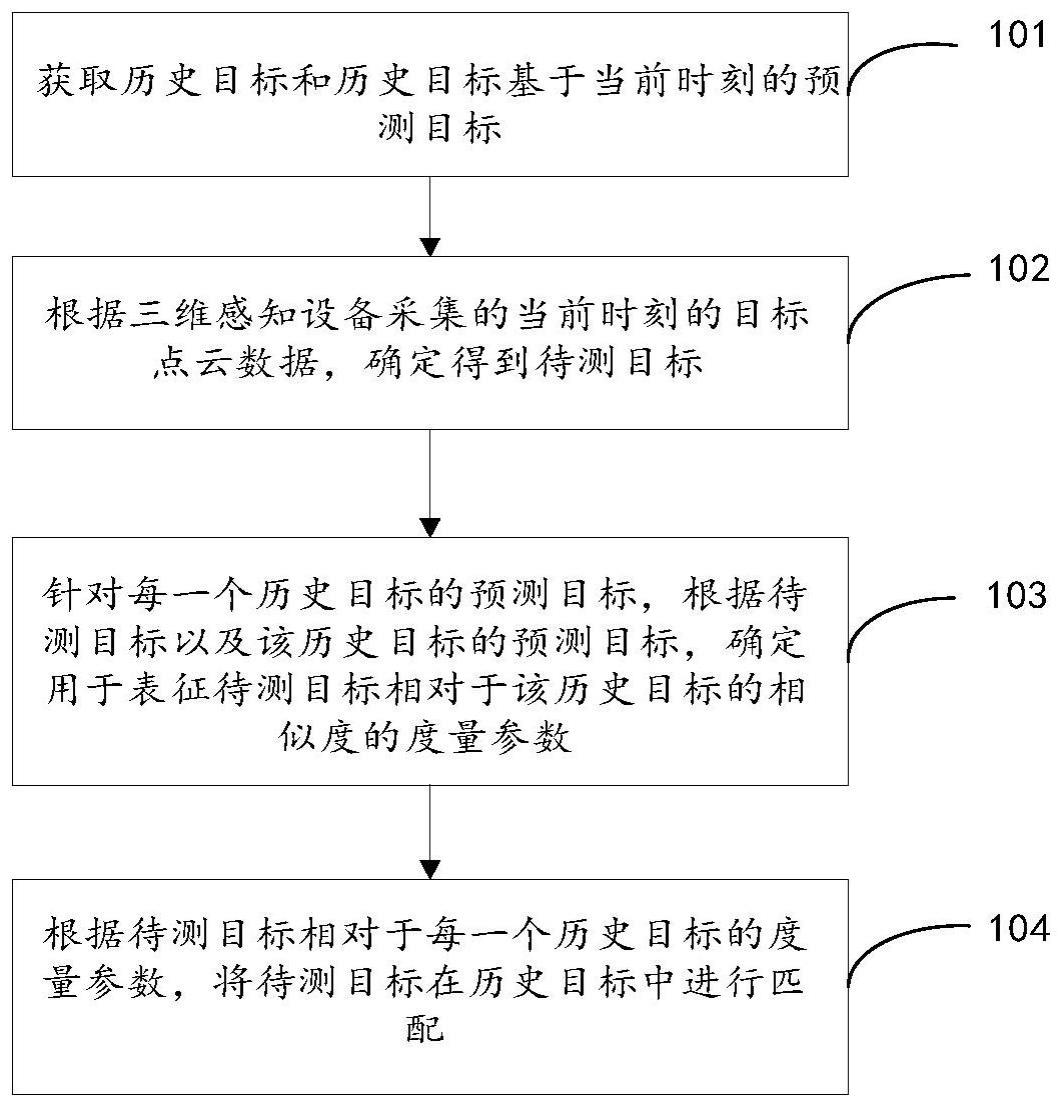
3、获取历史目标和历史目标基于当前时刻的预测目标;历史目标是在当前时刻前预设时间段内检测并注册管理的点云目标;
4、根据三维感知设备采集的当前时刻的目标点云数据,确定得到待测目标;
5、针对每一个历史目标的预测目标,根据待测目标以及该历史目标的预测目标,确定用于表征待测目标相对于该历史目标的相似度的度量参数;度量参数包括用于表征重心位置相似度的重心距离度量、用于表征对历史目标的连续消失时间的时间差异度量、用于表征对待测目标和历史目标的长宽相似度的形状差异度量,其中,形状差异度量基于待测目标和历史目标的点云密度确定;
6、根据待测目标相对于每一个历史目标的度量参数,将待测目标在历史目标中进行匹配。
7、可选的,确定待测目标相对于该历史目标的重心距离度量,包括:
8、获取该历史目标的预测目标的第一重心点位置信息、待测目标的第二重心点位置信息以及预设的重心距离匹配阈值;
9、根据重心距离匹配阈值、第一重心点位置信息、第二重心点位置信息,确定待测目标相对于该历史目标的重心距离度量。
10、可选的,确定待测目标相对于该历史目标的时间差异度量,包括:
11、获取该历史目标出现的最后时刻、三维感知设备的采样周期以及预设的时间差异因子;
12、根据当前时刻、该历史目标出现的最后时刻、三维感知设备的采样周期以及时间差异因子,确定待测目标相对于该历史目标的时间差异度量。
13、可选的,确定待测目标相对于该历史目标的形状差异度量,包括:
14、获取该历史目标的预测目标的第一长度、第一宽度、该历史目标在出现的最后时刻的第一点云密度,获取待测目标的第二长度、第二宽度以及第二点云密度、预设的第一松弛项因子、预设的第二松弛项因子、预设的形状差异因子、标准点云密度;
15、根据第一长度、第一宽度、第一点云密度、第二长度、第二宽度、第二点云密度、第一松弛项因子、第二松弛项因子、形状差异因子以及标准点云密度,确定待测目标相对于该历史目标的形状差异度量。
16、可选的,度量参数还包括点云密度差异度量和/或航向差异度量。
17、可选的,确定待测目标相对于该历史目标的点云密度差异度量,包括:
18、获取预设的点云密度差异因子、预设的点云密度差异阈值、该历史目标在出现的最后时刻的第一点云密度、待测目标的第二点云密度;
19、根据点云密度差异因子、点云密度差异阈值、第一点云密度、第二点云密度,确定待测目标相对于该历史目标的点云密度差异度量。
20、可选的,确定待测目标相对于该历史目标的航向差异度量,包括:
21、获取预设的航向差异因子、预设的标准角度变化率、预设的角度差异阈值、待测目标的航向角度、该历史目标的预测目标的航向角度以及该历史目标出现的最后时刻;
22、根据当前时刻、航向差异因子、标准角度变化率、角度差异阈值、待测目标的航向角度、该历史目标的预测目标的航向角度以及该历史目标出现的最后时刻,确定待测目标相对于该历史目标的航向差异度量。
23、可选的,方法还包括:
24、若匹配成功,则确定与待测目标匹配的历史目标,待测目标继承该历史目标的id,并加入该历史目标的轨迹;
25、若匹配不成功,则对待测目标新建轨迹、id。
26、可选的,根据待测目标以及该历史目标的预测目标,确定用于表征待测目标相对于该历史目标的相似度的度量参数,包括:
27、根据待测目标以及该历史目标的预测目标,通过以下公式,确定用于表征待测目标相对于该历史目标的相似度的度量参数:
28、
29、
30、其中,hij为待测目标i相对于历史目标j的度量参数,i、j均为大于0的整数;xi为待测目标i的第二重心点的x轴坐标;xj为预测目标j的第一重心点的x轴坐标;yi为待测目标i的第二重心点的y轴坐标;yj为预测目标j的第一重心点的y轴坐标;li为待测目标i的长度;lj为预测目标j的长度;wi为待测目标i的宽度;wj为预测目标j的宽度;ti为当前时刻;tj为该历史目标j出现的最后时刻;sdlmt为重心距离匹配阈值;ρstac为标准点云密度;t为采样周期;δ1为时间差异因子,δ1≥0;δ4为形状差异因子,δ4≥0;γ为第一松弛项因子,γ≥0;ε为第二松弛项因子,ε≥0。
31、依据本发明的第二个方面,提供一种目标匹配装置,包括:
32、获取模块,用于获取历史目标和历史目标基于当前时刻的预测目标;历史目标是在当前时刻前预设时间段内检测并注册管理的点云目标;
33、确定模块,用于根据三维感知设备采集的当前时刻的目标点云数据,确定得到待测目标;
34、计算模块,用于针对每一个历史目标的预测目标,根据待测目标以及该历史目标的预测目标,确定用于表征待测目标相对于该历史目标的相似度的度量参数;度量参数包括用于表征重心位置相似度的重心距离度量、用于表征对历史目标的连续消失时间的时间差异度量、用于表征对待测目标和历史目标的长宽相似度的形状差异度量,其中,形状差异度量基于待测目标和历史目标的点云密度确定;
35、匹配模块,用于根据待测目标相对于每一个历史目标的度量参数,将待测目标在历史目标中进行匹配。
36、本说明书实施例中的上述一个或多个技术方案,至少具有如下技术效果:
37、本说明书实施例提供的一种目标匹配方法及装置,在将待测目标与历史目标进行匹配时,计算的度量参数考虑了历史目标消失时间差异的影响,在预设时间段内消失的历史目标均可被匹配,增加了消失时间较长的历史目标基于当前时刻的预测目标与待测目标的时间差异度量。另一方面还考虑了形状差异的影响,即增加了历史目标基于当前时刻的预测目标与待测目标的形状差异度量,包括待测目标与预测目标之间形状差异较大的情况。在形状差异度量计算时,会根据目标检测效度差异,对小尺度目标和点云密度水平较低的目标进行松弛,从而提升待测目标跟踪的精度。
38、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!