一种糜子绿豆不同间作模式下生长态势确定方法及系统
本发明涉及农业领域,尤其是涉及一种糜子绿豆不同间作模式下生长态势确定方法及系统。
背景技术:
1、作物间作是一种在同一农田中套种两种或更多不同类型的作物的种植方法,不同类型的作物在根系深度、形状和根际分泌物等方面存在差异,这意味着它们可以在不同层次上利用土壤中的养分和水分。例如,一种作物的深根可能可以利用深层次的水分和养分,而另一种作物的浅根则可以在表层提供保护性覆盖,减少土壤侵蚀。此外,不同类型的植物通常释放不同类型的有机物质,有助于改善土壤的有机质含量,增强土壤的肥力和水分保持能力;而且其中一种作物的生长可能有助于另一种作物的生长。糜子和绿豆间作是一种常见的套种方式,糜子是一种高大的草本作物,具有深根系,有助于改善土壤通气性和结构。绿豆是一种豆科作物可以固定大气中的氮,增加土壤的肥力,将它们套种在一起可以同时改善土壤的物理和化学性质。
2、糜子(prosomillet)和绿豆(mungbean)间作方式有多重,例如1行糜子和1行绿豆间作(1p1m)、2行糜子和2行绿豆间作(2p2m)、4行糜子和2行绿豆间作(4p2m)、4行糜子和4行绿豆间作(4p4m)、2行糜子和4行绿豆间作(2p4m)等,不同的间作方式,作物间竞争和互利程度不同,最后的产量也会不同。而且即使相同的间作模型在不同的土壤上的表现也不同。以往对于间作方式的确定多集中在从关键指标上确定优劣,例如糜子、绿豆干物质积累、根系生长趋势、叶面积指数、叶绿素含量等,但是一方面,上述这些指标的获取比较复杂,例如获取根系生长情况需要获取较为完整的根系,另外一方面,关键性指标来自具体的植株,选择不同的植株得到的结果可能不同,无法从整体上判断哪种间作方式对某种土壤最为适合。
技术实现思路
1、为了解决上述问题,本发明提供了一种糜子绿豆不同间作模式下生长态势确定方法,所述方法包括以下步骤:
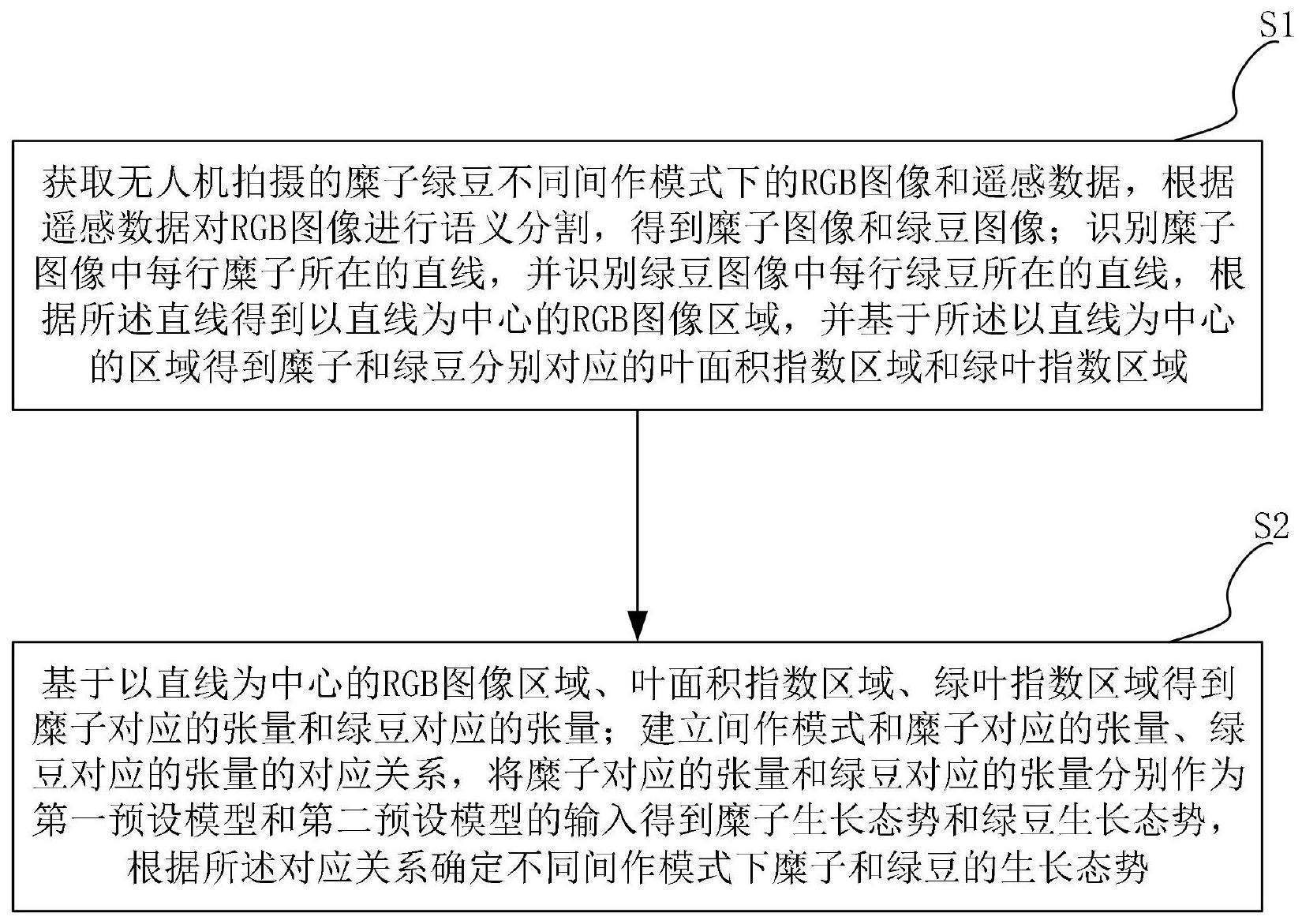
2、获取无人机拍摄的糜子绿豆不同间作模式下的rgb图像和遥感数据,根据遥感数据对rgb图像进行语义分割,得到糜子图像和绿豆图像;识别糜子图像中每行糜子所在的直线,并识别绿豆图像中每行绿豆所在的直线,根据所述直线得到以直线为中心的rgb图像区域,并基于所述以直线为中心的区域得到糜子和绿豆分别对应的叶面积指数区域和绿叶指数区域;
3、基于以直线为中心的rgb图像区域、叶面积指数区域、绿叶指数区域得到糜子对应的张量和绿豆对应的张量;建立间作模式和糜子对应的张量、绿豆对应的张量的对应关系,将糜子对应的张量和绿豆对应的张量分别作为第一预设模型和第二预设模型的输入得到糜子生长态势和绿豆生长态势,根据所述对应关系确定不同间作模式下糜子和绿豆的生长态势。
4、优选地,所述根据遥感数据对rgb图像进行语义分割,具体为:
5、根据遥感数据得到叶面积指数图像、绿叶指数图像,将rgb图像转换为灰度图像并分割为多个预设尺寸的图像块,根据图像块的地理位置确定与图像块对应的叶面积指数图像块和绿叶指数图像块;
6、基于叶面积指数图像块的熵和所有叶面积指数图像块的熵的最小值得到第一值,并基于绿叶指数图像块的熵和所有绿叶指数图像块的熵的最小值得到第二值,利用第一值和第二值更新所述图像块的大小,保持图像块的中心不变得到多个尺寸不完全相同的图像块,将多个尺寸不完全相同的图像块转换为多个预设尺寸的图像块,作为语义分割模型的输入得到rgb图像的分割结果。
7、优选地,所述利利用第一值和第二值更新所述图像块的大小,保持图像块的中心不变得到多个尺寸不完全相同的图像块,具体为:
8、计算所述第一值和所述第二值的平均值,并获取所述图像块的中心,按照所述平均值增大所述预设尺寸得到目标尺寸;
9、根据所述中心和所述目标尺寸得到多个尺寸不完全相同的图像块。
10、优选地,所述基于以直线为中心的rgb图像区域、叶面积指数区域、绿叶指数区域得到糜子对应的张量和绿豆对应的张量,具体为:
11、对多个以直线为中心的rgb图像区域进行拼接得到拼接后的rgb图像,将rgb图像的三个通道作为糜子对应的张量的前三个通道;对多个以直线为中心的叶面积指数区域进行拼接得到拼接后的叶面积指数区域图像,将拼接后的叶面积指数区域图像作为糜子对应的张量的第四个通道;对多个以直线为中心的绿叶指数区域进行拼接得到拼接后的绿叶指数区域图像,将拼接后的绿叶指数区域图像作为糜子对应的张量的第五个通道;
12、采用上述相同的方式得到绿豆对应的张量。
13、优选地,所述将糜子对应的张量和绿豆对应的张量分别作为第一预设模型和第二预设模型的输入得到糜子生长态势和绿豆生长态势,具体地:
14、将糜子对应的张量分为多个patch,获取每个patch距离最近的直线的距离,对所述距离进行编码得到位置编码;根据patch得到特征编码,将位置编码和特征编码拼接得到第一个vit网络模型的输入,得到糜子的生长态势;
15、将绿豆对应的张量分为多个patch,获取每个patch距离最近的直线的距离,对所述距离进行编码得到位置编码;根据patch得到特征编码,将位置编码和特征编码拼接得到第二个vit网络模型的输入,得到绿豆的生长态势。
16、优选地,所述获取每个patch距离最近的直线的距离,具体为:
17、获取patch对应的rgb图像块在拼接后的rgb图像中的位置,根据所述位置和拼接成的rgb图像的直线确定距离所有直线的最近距离。
18、此外,本发明提供了一种糜子绿豆不同间作模式下生长态势确定系统,所述系统包括以下模块:
19、分割模块,用于获取无人机拍摄的糜子绿豆不同间作模式下的rgb图像和遥感数据,根据遥感数据对rgb图像进行语义分割,得到糜子图像和绿豆图像;识别糜子图像中每行糜子所在的直线,并识别绿豆图像中每行绿豆所在的直线,根据所述直线得到以直线为中心的rgb图像区域,并基于所述以直线为中心的区域得到糜子和绿豆分别对应的叶面积指数区域和绿叶指数区域;
20、生长态势确定模块,用于基于以直线为中心的rgb图像区域、叶面积指数区域、绿叶指数区域得到糜子对应的张量和绿豆对应的张量;建立间作模式和糜子对应的张量、绿豆对应的张量的对应关系,将糜子对应的张量和绿豆对应的张量分别作为第一预设模型和第二预设模型的输入得到糜子生长态势和绿豆生长态势,根据所述对应关系确定不同间作模式下糜子和绿豆的生长态势。
21、优选地,所述根据遥感数据对rgb图像进行语义分割,具体为:
22、根据遥感数据得到叶面积指数图像、绿叶指数图像,将rgb图像转换为灰度图像并分割为多个预设尺寸的图像块,根据图像块的地理位置确定与图像块对应的叶面积指数图像块和绿叶指数图像块;
23、基于叶面积指数图像块的熵和所有叶面积指数图像块的熵的最小值得到第一值,并基于绿叶指数图像块的熵和所有绿叶指数图像块的熵的最小值得到第二值,利用第一值和第二值更新所述图像块的大小,保持图像块的中心不变得到多个尺寸不完全相同的图像块,将多个尺寸不完全相同的图像块转换为多个预设尺寸的图像块,作为语义分割模型的输入得到rgb图像的分割结果。
24、优选地,所述利利用第一值和第二值更新所述图像块的大小,保持图像块的中心不变得到多个尺寸不完全相同的图像块,具体为:
25、计算所述第一值和所述第二值的平均值,并获取所述图像块的中心,按照所述平均值增大所述预设尺寸得到目标尺寸;
26、根据所述中心和所述目标尺寸得到多个尺寸不完全相同的图像块。
27、优选地,所述基于以直线为中心的rgb图像区域、叶面积指数区域、绿叶指数区域得到糜子对应的张量和绿豆对应的张量,具体为:
28、对多个以直线为中心的rgb图像区域进行拼接得到拼接后的rgb图像,将rgb图像的三个通道作为糜子对应的张量的前三个通道;对多个以直线为中心的叶面积指数区域进行拼接得到拼接后的叶面积指数区域图像,将拼接后的叶面积指数区域图像作为糜子对应的张量的第四个通道;对多个以直线为中心的绿叶指数区域进行拼接得到拼接后的绿叶指数区域图像,将拼接后的绿叶指数区域图像作为糜子对应的张量的第五个通道;
29、采用上述相同的方式得到绿豆对应的张量。
30、优选地,所述将糜子对应的张量和绿豆对应的张量分别作为第一预设模型和第二预设模型的输入得到糜子生长态势和绿豆生长态势,具体地:
31、将糜子对应的张量分为多个patch,获取每个patch距离最近的直线的距离,对所述距离进行编码得到位置编码;根据patch得到特征编码,将位置编码和特征编码拼接得到第一个vit网络模型的输入,得到糜子的生长态势;
32、将绿豆对应的张量分为多个patch,获取每个patch距离最近的直线的距离,对所述距离进行编码得到位置编码;根据patch得到特征编码,将位置编码和特征编码拼接得到第二个vit网络模型的输入,得到绿豆的生长态势。
33、优选地,所述获取每个patch距离最近的直线的距离,具体为:
34、获取patch对应的rgb图像块在拼接后的rgb图像中的位置,根据所述位置和拼接成的rgb图像的直线确定距离所有直线的最近距离。
35、最后,本发明提供了一种计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序在被处理器执行时,实现如上所述的方法。
36、本发明先对不同间作的图像进行语义分割,然后借助模型得到糜子和绿豆在不同间作模式下的生长情况。不仅能够应用在不同间作模式下糜子和绿豆的整体长势判断,而且能够应用在相同间作模式下,不同土壤条件下糜子和绿豆整体的长势判断。
- 还没有人留言评论。精彩留言会获得点赞!