一种基于步态的身份识别方法、装置、芯片及终端与流程
本发明涉及人工智能,特别是涉及一种基于步态的身份识别方法、装置、芯片及终端。
背景技术:
1、随着安全敏感场合对智能监控系统需求的增加,非接触远距离监控系统成为当前生物识别领域的一个研究热点,例如图像识别,对于在图像或者视频中识别目标对象,目前主要是通过边缘检测和目标模型匹配的方式来实现,但是这样的方式在提取目标和目标的特征时,会同时提取到背景和前景的信息,在对背景信息的提出时,由于存在较多的影响因素,如遮挡等,从而导致身份验证识别的准确度较低。
技术实现思路
1、基于此,本发明提供一种基于步态的身份识别方法、装置、芯片及存储介质,以解决现有的步态身份识别方法存在识别准确率较低且模型复杂度高的问题。
2、第一方面,提供一种基于步态的身份识别方法,包括:
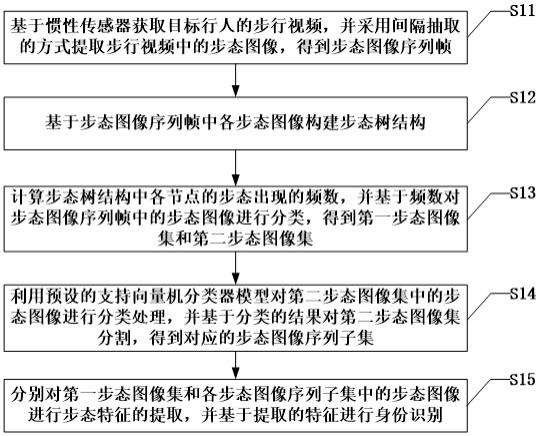
3、基于惯性传感器获取目标行人的步行视频,并采用间隔抽取的方式提取所述步行视频中的步态图像,得到步态图像序列帧;
4、基于所述步态图像序列帧中各步态图像构建步态树结构;
5、计算所述步态树结构中各节点的步态出现的频数,并基于所述频数对所述步态图像序列帧中的步态图像进行分类,得到第一步态图像集和第二步态图像集,其中,所述第一步态图像集中各步态出现的频数均大于所述第二步态图像集中各步态出现的频数;
6、利用预设的支持向量机分类器模型对所述第二步态图像集中的步态图像进行分类处理,并基于分类的结果对所述第二步态图像集分割,得到对应的步态图像序列子集;
7、分别对所述第一步态图像集和各所述步态图像序列子集中的步态图像进行步态特征的提取,并基于提取的特征进行身份识别。
8、可选的,所述惯性传感器为加速度传感器,所述基于惯性传感器获取目标行人的步行视频,并采用间隔抽取的方式提取所述步行视频中的步态图像,得到步态图像序列帧,包括:
9、获取目标行人在行走过程中的视频数据和所述加速度传感器产生的坐标信息;
10、基于时间关系将各所述坐标信息与视频数据中的步态图像进行关联,得到步行视频;
11、基于所述坐标信息和间隔抽取的方式,计算出提取图像的间隔;
12、从所述步行视频中依次提取满足所述间隔的跨度的步态图像;
13、将所述步态图像的坐标信息作为所述步态图像的下标,得到步态图像序列帧。
14、可选的,所述从所述步行视频中依次提取满足所述间隔的跨度的步态图像,包括:
15、基于所述加速度传感器获取各步态图像的步态重力分量;
16、基于所述步态重力分量对所述步行视频中的各步态图像进行提重处理,得到相同的步态图像和所述步态图像在所述步行视频中的位置;
17、对相同的步态图像进行归一化处理,得到融合步态图像;
18、基于所述位置将所述融合步态图像替换对应的步态图像集合;
19、从所述步态图像集合中依次提取满足所述间隔的跨度的步态图像。
20、可选的,所述计算所述步态树结构中各节点的步态出现的频数,并基于所述频数对所述步态图像序列帧中的步态图像进行分类,得到第一步态图像集和第二步态图像集,包括:
21、提取所述步态树结构中的上层节点,并利用步态识别模型识别所述上层节点中的步态图像的步态类型;
22、基于所述步态类型计算对应的上层节点的步态出现的频数;
23、判断所述频数是否大于预设的分类界限值,得到判断结果;
24、将所述判断结果将所述步态图像序列帧中的步态图像分为两类,得到第一步态图像集和第二步态图像集。
25、可选的,所述利用预设的支持向量机分类器模型对所述第二步态图像集中的步态图像进行分类处理,并基于分类的结果对所述第二步态图像集分割,得到对应的步态图像序列子集,包括:
26、将所述第二步态图像集转换为二叉树结构,并基于所述二叉树结构确定树分支;
27、将所述树分支对应的步态图像序列输入至预设的支持向量机分类器模型中求最优解;
28、基于所述最优解对各树分支进行归类,并基于归类的结果对所述第二步态图像集分割,得到对应的步态图像序列子集。
29、可选的,所述分别对所述第一步态图像集和各所述步态图像序列子集中的步态图像进行步态特征的提取,并基于提取的特征进行身份识别,包括:
30、利用预设的残差自编码身份认证网络,提取所述第一步态图像集和各所述步态图像序列子集中步态图像的步态特征;
31、基于提取的步态特征确定所述第一步态图像集和各所述步态图像序列子集对应的特征维度;
32、基于所述特征维度与步态周期的对应关系,确定所述目标行人当前的步态周期,并基于所述步态周期进行身份识别。
33、可选的,所述基于所述步态周期进行身份识别,包括:
34、对所述第一步态图像集和各所述步态图像序列子集对应的步态周期进行融合处理,得到组合步态周期;
35、判断所述组合步态周期的占比是否满足身份验证规则中步态周期的权重占比,得到识别结果。
36、第二方面,提供一种基于步态的身份识别装置,包括:
37、获取模块,用于基于惯性传感器获取目标行人的步行视频,并采用间隔抽取的方式提取所述步行视频中的步态图像,得到步态图像序列帧;
38、构建模块,用于基于所述步态图像序列帧中各步态图像构建步态树结构;
39、分类模块,用于计算所述步态树结构中各节点的步态出现的频数,并基于所述频数对所述步态图像序列帧中的步态图像进行分类,得到第一步态图像集和第二步态图像集,其中,所述第一步态图像集中各步态出现的频数均大于所述第二步态图像集中各步态出现的频数;以及利用预设的支持向量机分类器模型对所述第二步态图像集中的步态图像进行分类处理,并基于分类的结果对所述第二步态图像集分割,得到对应的步态图像序列子集;
40、识别模块,用于分别对所述第一步态图像集和各所述步态图像序列子集中的步态图像进行步态特征的提取,并基于提取的特征进行身份识别。
41、可选的,所述获取模块具体用于:
42、获取目标行人在行走过程中的视频数据和所述加速度传感器产生的坐标信息;
43、基于时间关系将各所述坐标信息与视频数据中的步态图像进行关联,得到步行视频;
44、基于所述坐标信息和间隔抽取的方式,计算出提取图像的间隔;
45、从所述步行视频中依次提取满足所述间隔的跨度的步态图像;
46、将所述步态图像的坐标信息作为所述步态图像的下标,得到步态图像序列帧。
47、可选的,所述获取模块具体用于:
48、基于所述加速度传感器获取各步态图像的步态重力分量;
49、基于所述步态重力分量对所述步行视频中的各步态图像进行提重处理,得到相同的步态图像和所述步态图像在所述步行视频中的位置;
50、对相同的步态图像进行归一化处理,得到融合步态图像;
51、基于所述位置将所述融合步态图像替换对应的步态图像集合;
52、从所述步态图像集合中依次提取满足所述间隔的跨度的步态图像。
53、可选的,所述分类模块具体用于:
54、提取所述步态树结构中的上层节点,并利用步态识别模型识别所述上层节点中的步态图像的步态类型;
55、基于所述步态类型计算对应的上层节点的步态出现的频数;
56、判断所述频数是否大于预设的分类界限值,得到判断结果;
57、将所述判断结果将所述步态图像序列帧中的步态图像分为两类,得到第一步态图像集和第二步态图像集。
58、可选的,所述分类模块具体用于:
59、将所述第二步态图像集转换为二叉树结构,并基于所述二叉树结构确定树分支;
60、将所述树分支对应的步态图像序列输入至预设的支持向量机分类器模型中求最优解;
61、基于所述最优解对各树分支进行归类,并基于归类的结果对所述第二步态图像集分割,得到对应的步态图像序列子集。
62、可选的,所述识别模块具体用于:
63、利用预设的残差自编码身份认证网络,提取所述第一步态图像集和各所述步态图像序列子集中步态图像的步态特征;
64、基于提取的步态特征确定所述第一步态图像集和各所述步态图像序列子集对应的特征维度;
65、基于所述特征维度与步态周期的对应关系,确定所述目标行人当前的步态周期,并基于所述步态周期进行身份识别。
66、可选的,所述识别模块具体用于:
67、对所述第一步态图像集和各所述步态图像序列子集对应的步态周期进行融合处理,得到组合步态周期;
68、判断所述组合步态周期的占比是否满足身份验证规则中步态周期的权重占比,得到识别结果。
69、第三方面,提供一种芯片,包括第一处理器,用于从第一存储器中调用并运行计算机程序,使得安装有所述芯片的设备执行如上所述的基于步态的身份识别方法的各个步骤。
70、第四方面,提供一种终端,包括第二存储器、第二处理器以及存储在所述第二存储器中并在所述第二处理器上运行的计算机程序,第二处理器执行所述计算机程序时实现如上介绍的基于步态的身份识别方法的各个步骤。
71、上述基于步态的身份识别方法、装置、芯片及存储介质,基于惯性传感器获取目标行人的步行视频,并采用间隔抽取的方式提取步行视频中的步态图像,得到步态图像序列帧;基于步态图像序列帧中各步态图像构建步态树结构;计算步态树结构中各节点的步态出现的频数,并基于频数对步态图像序列帧中的步态图像进行分类,得到第一步态图像集和第二步态图像集,其中,第一步态图像集中各步态出现的频数均大于第二步态图像集中各步态出现的频数;利用预设的支持向量机分类器模型对第二步态图像集中的步态图像进行分类处理,并基于分类的结果对第二步态图像集分割,得到对应的步态图像序列子集;分别对第一步态图像集和各步态图像序列子集中的步态图像进行步态特征的提取,并基于提取的特征进行身份识别。本发明实施例的方案通过将步态图像序列帧中的步态图像按照步态出现的频数先划分为第一步态图像集和第二步态图像集,然后再利用支持向量机分类器模型对第二步态图像集进行二分类,基于分类后的多种步态图像集进行步态特征提取,以实现身份识别,从而提高对步态特征提取的深度,提高特征提取和识别准确度。
- 还没有人留言评论。精彩留言会获得点赞!