基于目标检测的受电弓状态实时监测方法
本发明涉及列车受电弓状态,具体为基于目标检测的受电弓状态实时监测方法。
背景技术:
1、在城市轨道交通中,电客车的受流方式通常包括受电弓和集电靴两种。为了保证作业人员的安全,通常在正线采用接触轨供电,在车辆段采用接触网供电。然而,这种供电方式存在一定的问题。
2、由于供电方式的不同,当列车从车辆段进入正线的过程中,司机需要在转换轨降下受电弓,升起集电靴,这一过程通常被称为降弓升靴。然而,这个过程容易出现司机误操作,例如在受电弓升起状态下动车进入接触网尽头,从而导致受电弓受损,这是一个重大的安全隐患。
3、当前,针对降弓升靴这一关键环节的解决方案主要依赖人工监控,这包括现场人员监控和通过视频远程监控受电弓是否降下。然而,这些方法存在明显的不足。首先,人工监控容易出现疏忽导致误判,从而导致安全事故的发生。其次,这种监控方法效率低,且对人力资源的依赖度高。
4、在当前数字化、智能化快速发展的背景下,这种传统的方法已经不能满足现代城市轨道交通的需求;
5、因此,利用计算机和图像处理技术实时识别出列车受电弓的升降状态并给予警告,成为解决这个问题的一个重要方向;
6、因此需要对以上问题提出一种新的解决方案。
技术实现思路
1、本发明的目的在于提供基于目标检测的受电弓状态实时监测方法,以解决现有的问题。
2、为实现上述目的,本发明提供如下技术方案:基于目标检测的受电弓状态实时监测方法,至少包括以下步骤:
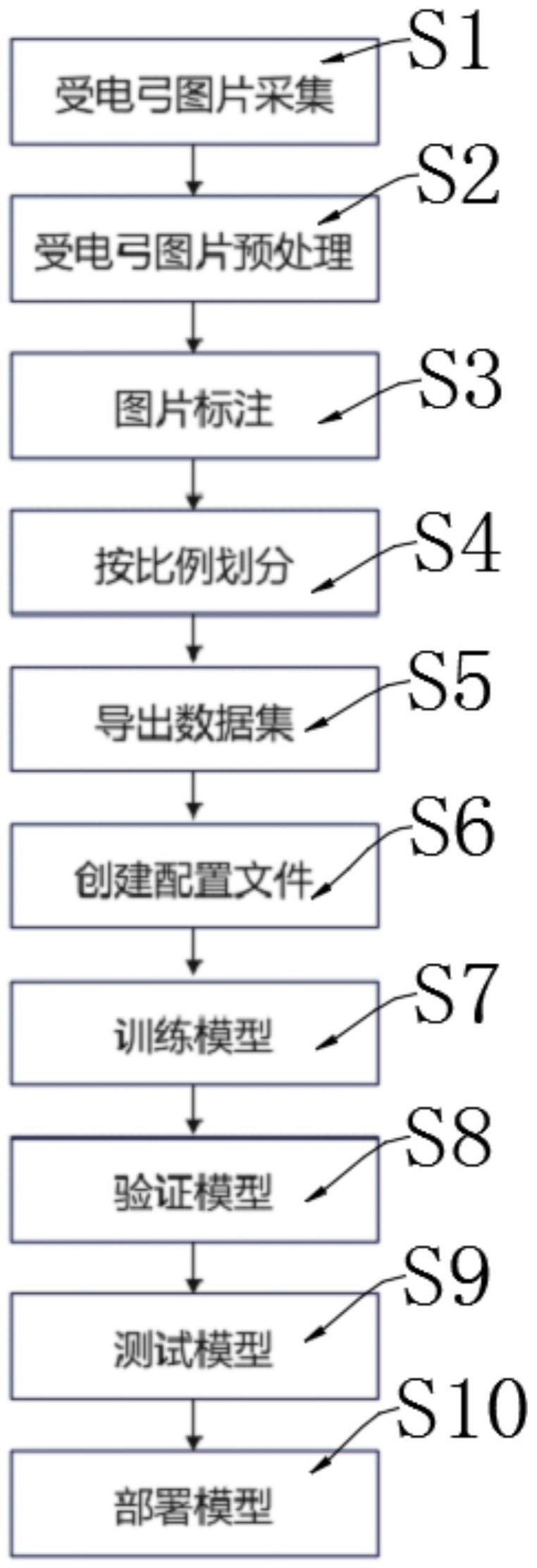
3、s1,受电弓的图像采集,通过安装在关键位置的固定摄像头,采集受电弓的图像数据;
4、s2,将s1采集到的受电弓原始图像进行预处理;
5、s3,将s2预处理后的受电弓图像进行标注,得到受电弓数据集;
6、s4,将s3中得到受电弓数据集的数据集进行划分;
7、s5,将s4中划分后的受电弓数据集进行导出;
8、s6,创建与s5对应的配置文件;
9、s7,根据s6进行配置和训练模型;
10、s8,对s7中的模型进行验证;
11、s9,对s7中得到的模型进行测试;
12、s10,对s7中得到的模型进行部署,嵌入监控系统。
13、优选地,所述采集受电弓的图像数据至少包括受电弓处于升起状态和降下状态的图像。
14、优选的,所述s2中的受电弓原始图像的预处理至少包括以下步骤:
15、从原始图片中去除exif方向,确保像素都以相同的方式排序;
16、二、通过自适应缩放和填充将原始图片分辨率调整为yolov8模型可接受输入的尺寸;
17、具体方法如下:
18、原始图像的宽度为w,高度为h,目标尺寸的宽度为tw,高度为th。
19、1、计算缩放比例r:
20、
21、这里,min()函数返回两个参数中的最小值。缩放比例r的计算目的是确保原始图像在宽度和高度方向上的缩放比例相同,从而保持宽高比不变。
22、2、计算缩放后的图像尺寸:
23、
24、
25、这里,round()函数用于四舍五入,int()函数用于将浮点数转换为整数,舍弃小数部分,只保留整数部分。通过将原始图像的宽度和高度分别乘以缩放比例r,可以得到缩放后的图像尺寸。
26、3、计算需要添加的填充大小dw和dh:
27、
28、
29、这里,dw和dh分别表示需要在宽度和高度方向上填充的大小。
30、4、计算上下和左右两侧的填充大小:
31、
32、
33、根据计算出的填充大小填充黑色(0,0,0)色块,
34、5、计算填充后的目标图像尺寸pw和ph:
35、
36、
37、最终,pw和ph就是经过自适应缩放和填充后的图像的大小,大小为
38、三、对缩放后的图片采用直方图均衡的方法进行对比度增强;
39、具体方法如下:
40、1、通过opencv库函数cv2.split将彩色图像的三个rgb通道分别分解出来;
41、2、使用opencv库函数cv2.equalizehist对分解出的每一个rgb通道图片进行直方图均衡;
42、3、最后通过opencv库函数cv2.merge合并三个通道的结果,实现直方图均衡。
43、四、对缩放后的图片进行饱和度增强;
44、具体方法如下:
45、通过pillow库函数对图像进行饱和度增强,通过设置饱和度增强系数设,对每个像素点的rgb值进行饱和度增强,之后返回增强后的图像。
46、经过上述预处理方法的图片构成最终数据集。
47、优选的,所述s3中受电弓图像的标注至少包括以下步骤:
48、采用roboflow对预处理后的数据集进行标注,标出受电弓的位置以及其状态,所述状态至少包括完全升起和完全降下;
49、标注的方式是在图像上绘制包含受电弓的边界框,并为边界框分配对应的类别标签,分为“up”和“down”两个分类标签。
50、优选地,所述s4中将数据集进行划分的过程至少包括以下步骤:将标注后的图像数据集按照7:2:1的比例随机划分为训练集、验证集和测试集,用于模型的训练、参数调整和性能评估。
51、优选的,所述s5中将数据集进行导出的过程至少包括以下步骤:使用roboflow导出,得到受电弓数据集,导出格式为yolov8,至少包含图片信息的jpeg文件和与之对应的包含标注信息的txt文件。
52、优选的,所述s6中的创建配置文件的过程至少包括以下步骤:新建一个文件名为shoudiangong.yaml的文件,文件内至少包含下列要素:受电弓训练数据集的图片文件和标签文件的路径、受电弓验证数据集的图片文件和标签文件的路径、受电弓测试数据集的图片文件和标签文件的路径、受电弓类别数为2、受电弓类别名称为up和down。
53、优选地,所述s7中配置和训练模型的过程至少包括以下步骤:
54、选择yolov8s.pt作为训练权重文件,shoudiangong.yaml为数据集yaml文件,训练轮次为200,输入尺寸为640。
55、所述yolov8模型首先将图片以640*640*3的格式输入到网络第0层,
56、具体来说,第0-9层为yolov8网络的backbone部分,负责从原始图像中提取多尺度的特征信息,第0、1、3、5、7层为卷积模块,通过调整卷积核的大小、步幅等参数,影响输出特征图的大小和形状;第2、4、6、8层为c2f模块,通过调整输入通道数、输出通道数、重复次数、是否使用shortcut连接以及卷积操作的参数等,实现特征提取、信息交换、降维等功能,从而增强模型的表征能力和性能;第9层为sppf模块,通过捕获不同尺度的信息并保持固定大小的输出,实现多尺度的特征池化。
57、第10-21层为yolov8网络的neck部分,负责对backbone提取的特征进行进一步处理、融合和生成多尺度特征金字塔,第10和13层为上采样模块,通过将特征图的分辨率增加,实现特征的细化和定位精度的提升,经过上采样之后,特征图的长和宽变成原来的两倍,通道数不变;第12、15、18、21层为c2f模块,在这里模块不使用shortcut连接,表示不使用残差连接,简化模块结构,降低模型复杂性;第11、14、17、20层为拼接模块,通过对指定层数输出的特征图进行合并,生成更丰富、多尺度的特征金字塔,用于后续目标检测head部分的处理;第16和19层为卷积模块,调整输出特征图的大小和形状。
58、第22层为yolov8网络head部分,负责将特征图转换为目标检测的输出,生成预测的边界框和类别概率。
59、优选地,所述s8中对模型进行验证的过程至少包括以下步骤:将s7中得到的best.pt文件进行验证集的验证,将权重文件改为best.pt后,重复s7的步骤。
60、优选地,所述s9对模型进行测试的过程至少包括以下步骤:
61、将得到的权重文件best.pt进行测试集的预测;
62、重新选择一段未经过训练的列车降弓升靴视频进行测试。
63、与现有技术相比,本发明的有益效果是:
64、本发明通过数据集的采集,模型的训练,最终将训练好的yolov8模型集成进监控系统中,可对列车出库时受电弓状态实时判别,识别精度高、速度快,减少人为误判,降低了人员劳动强度,提高了工作效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!