一种驾驶员驾驶状态的标定方法及装置与流程
本发明涉及汽车驾驶员安全驾驶的,尤其涉及一种驾驶员驾驶状态的标定方法及装置。
背景技术:
1、随着社会的快速发展,驾车出行已经成为大家的首选出行方式,由于车辆数量较多,在给大家带来出行便利的同时也导致交通事故逐年上升。危险驾驶行为是交通事故的主要原因,而危险驾驶行为主要包括疲劳检测、分心驾驶、打电话和抽烟等行为。为了减少危险驾驶行为的发生,我国要求相关车辆配置安全辅助驾驶产品,其中包括驾驶员监控系统,驾驶员监控系统通过红外摄像头捕捉驾驶员人脸的相关信息,从而判断驾驶员是否处于危险驾驶行为。
2、在实际工作中,驾驶员监控系统往往需要知道驾驶员的正常驾驶状态,包括驾驶员的正视前方头部姿态和驾驶员的视线方向,将其作为判断危险驾驶行为的依据。目前驾驶员监控系统往往是通过手动标定方式获取这些信息。例如,安装好驾驶员监控摄像头之后,要求驾驶员正视前方,进行手动标定去获取驾驶员的正视前方头部姿态和驾驶员的视线方向。这就要求每一台设备都需要进行手动标定,导致大量的工作量。另外手动标定驾驶员对象往往只有一个,当更换不同的驾驶员时,其正视前方头部姿态和视线方向都会发生变化,与手动标定的信息有差异,导致检测准确率下降。
技术实现思路
1、基于此,有必要针对上述问题,提出一种驾驶员驾驶状态的标定方法及装置,以解决现有技术的以下问题:目前驾驶员监控系统往往是通过手动标定方式对驾驶员状态进行标定,并且手动标定驾驶员对象往往只有一个,当更换不同的驾驶员时,其正视前方头部姿态和视线方向都会发生变化,与手动标定的信息有差异,导致检测准确率下降。
2、本发明实施例的第一技术方案为:
3、一种驾驶员驾驶状态的标定方法,基于驾驶员监控系统进行标定,其包括:
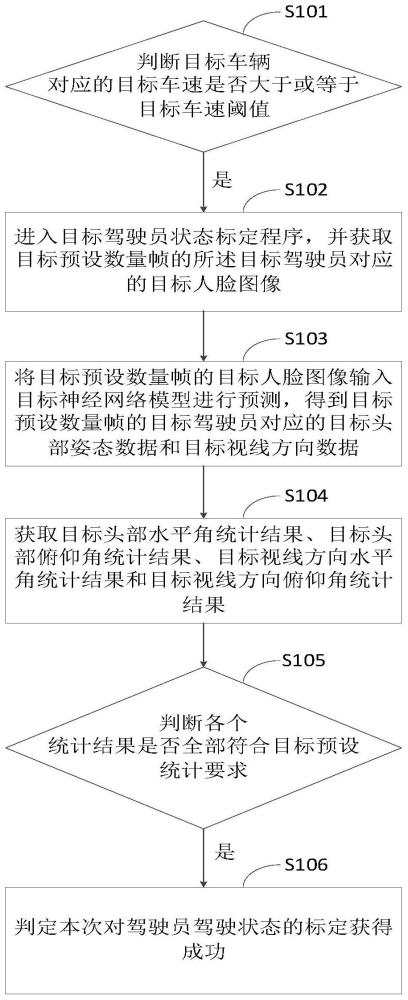
4、在目标驾驶员驾驶目标车辆行驶的过程中,每隔预目标设时长判断所述目标车辆对应的目标车速是否大于或等于目标车速阈值;若是,则进入目标驾驶员状态标定程序,并获取目标预设数量帧的所述目标驾驶员对应的目标人脸图像;将所述目标预设数量帧的所述目标人脸图像输入目标神经网络模型进行预测,得到所述目标预设数量帧的所述目标驾驶员对应的目标头部姿态数据和目标视线方向数据,其中所述目标头部姿态数据包括目标头部水平角数据和目标头部俯仰角数据,所述目标视线方向数据包括目标视线方向水平角数据和目标视线方向俯仰角数据;分别对所述目标头部水平角数据、所述目标头部俯仰角数据、所述目标视线方向水平角数据和所述目标视线方向俯仰角数据进行统计处理,得到目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果;判断所述目标头部水平角统计结果、所述目标头部俯仰角统计结果、所述目标视线方向水平角统计结果和所述目标视线方向俯仰角统计结果是否全部符合目标预设统计要求;若是,则判定本次对所述驾驶员驾驶状态的标定获得成功。
5、本发明实施例的第二技术方案为:
6、一种驾驶员驾驶状态的标定装置,基于驾驶员监控系统进行标定,其包括:
7、车辆速度检测模块,用于在目标驾驶员驾驶目标车辆行驶的过程中,每隔预目标设时长判断所述目标车辆对应的目标车速是否大于或等于目标车速阈值;人脸图像获取模块,用于当所述目标车辆对应的目标车速是否大于或等于目标车速阈值时,进入目标驾驶员状态标定程序,并获取目标预设数量帧的所述目标驾驶员对应的目标人脸图像;人脸图像预测模块,用于将所述目标预设数量帧的所述目标人脸图像输入目标神经网络模型进行预测,得到所述目标预设数量帧的所述目标驾驶员对应的目标头部姿态数据和目标视线方向数据,其中所述目标头部姿态数据包括目标头部水平角数据和目标头部俯仰角数据,所述目标视线方向数据包括目标视线方向水平角数据和目标视线方向俯仰角数据;驾驶数据统计模块,用于分别对所述目标头部水平角数据、所述目标头部俯仰角数据、所述目标视线方向水平角数据和所述目标视线方向俯仰角数据进行统计处理,得到目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果;统计结果判断模块,用于判断所述目标头部水平角统计结果、所述目标头部俯仰角统计结果、所述目标视线方向水平角统计结果和所述目标视线方向俯仰角统计结果是否全部符合目标预设统计要求;统计结果标定模块,用于当所述目标头部水平角统计结果、所述目标头部俯仰角统计结果、所述目标视线方向水平角统计结果和所述目标视线方向俯仰角统计结果全部符合目标预设统计要求时,判定本次对所述驾驶员驾驶状态的标定获得成功。
8、本发明实施例的第三技术方案为:
9、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行以下步骤:
10、在目标驾驶员驾驶目标车辆行驶的过程中,每隔预目标设时长判断所述目标车辆对应的目标车速是否大于或等于目标车速阈值;若是,则进入目标驾驶员状态标定程序,并获取目标预设数量帧的所述目标驾驶员对应的目标人脸图像;将所述目标预设数量帧的所述目标人脸图像输入目标神经网络模型进行预测,得到所述目标预设数量帧的所述目标驾驶员对应的目标头部姿态数据和目标视线方向数据,其中所述目标头部姿态数据包括目标头部水平角数据和目标头部俯仰角数据,所述目标视线方向数据包括目标视线方向水平角数据和目标视线方向俯仰角数据;分别对所述目标头部水平角数据、所述目标头部俯仰角数据、所述目标视线方向水平角数据和所述目标视线方向俯仰角数据进行统计处理,得到目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果;判断所述目标头部水平角统计结果、所述目标头部俯仰角统计结果、所述目标视线方向水平角统计结果和所述目标视线方向俯仰角统计结果是否全部符合目标预设统计要求;若是,则判定本次对所述驾驶员驾驶状态的标定获得成功。
11、本发明实施例的第四技术方案为:
12、一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行以下步骤:
13、在目标驾驶员驾驶目标车辆行驶的过程中,每隔预目标设时长判断所述目标车辆对应的目标车速是否大于或等于目标车速阈值;若是,则进入目标驾驶员状态标定程序,并获取目标预设数量帧的所述目标驾驶员对应的目标人脸图像;将所述目标预设数量帧的所述目标人脸图像输入目标神经网络模型进行预测,得到所述目标预设数量帧的所述目标驾驶员对应的目标头部姿态数据和目标视线方向数据,其中所述目标头部姿态数据包括目标头部水平角数据和目标头部俯仰角数据,所述目标视线方向数据包括目标视线方向水平角数据和目标视线方向俯仰角数据;分别对所述目标头部水平角数据、所述目标头部俯仰角数据、所述目标视线方向水平角数据和所述目标视线方向俯仰角数据进行统计处理,得到目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果;判断所述目标头部水平角统计结果、所述目标头部俯仰角统计结果、所述目标视线方向水平角统计结果和所述目标视线方向俯仰角统计结果是否全部符合目标预设统计要求;若是,则判定本次对所述驾驶员驾驶状态的标定获得成功。
14、采用本发明实施例,具有如下有益效果:
15、本发明首先通过判断目标车辆的车速是否大于或等于目标车速阈值,若是则获取目标预设数量帧的目标驾驶员对应的目标人脸图像,对目标人脸图像进行预测,得到目标头部水平角数据、目标头部俯仰角数据、目标视线方向水平角数据和目标视线方向俯仰角数据,然后分别获取目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果,最后判断目标头部水平角统计结果、目标头部俯仰角统计结果、目标视线方向水平角统计结果和目标视线方向俯仰角统计结果是否全部符合目标预设统计要求,若是则判定本次标定获得成功。本发明可在车辆正常行驶过程中完成标定操作,获取驾驶员状态的标定数据,较少需要手动操作工作,还可以解决人工标定不正确导致的报警不准确问题,还可以解决人工标定后,移动摄像头位置造成的报警不准确问题;其次,当更换司机后,本发明可以自动矫正标定数据,提高标定数据的可靠性;其次,本发明基于正态分布进行统计分析,排除了奇异值的干扰,提高标定数据的准确性;最后,本发明通过统计多次标定数据的标准偏差,可确保标定数据符合驾驶员正常驾驶并正视前方的情况。
- 还没有人留言评论。精彩留言会获得点赞!