基于MIMO毫米波雷达的细粒度呼吸波形重构方法
本发明属于非接触式生命体征监测领域,具体的说是涉及一种基于mimo毫米波雷达的细粒度呼吸波形重构方法。
背景技术:
1、长期的呼吸监测在呼吸系统相关疾病的诊断中起着极其重要的作用。目前的呼吸监测方法主要基于接触式设备,如胸带、呼吸鼻夹、呼气流量计以及智能手表。这些方法具有一定的侵入性,并且一般需要在专业人员的指导下进行,应用受到一定局限。为了克服这些不足,基于非接触式的解决方案受到了关注,如射频、相机、声学以及红外信号等。其中,调频连续波(frequency modulated continuous wave,fmcw)雷达由于发展快速,成为了当前研究和应用的热点。
2、人呼吸时上半身的微动会引起雷达相位的变化,此即雷达探测呼吸的基本原理。其一般处理步骤包括:人体区域定位、相位提取和呼吸波形分离。人体区域定位是指对fmcw雷达原始数据在快时间(fast time)维度进行傅里叶变换(fast fourier transform,fft),将不同距离的目标的反射信号隔离到不同的距离箱(range bin)中,并利用恒虚警率(constant false-alarm rate,cfar)算法定位人体区域所在距离箱(一般人体区域占据多个距离箱)。相位提取阶段,首先沿着慢时间(slow time)维度选择人体区域所在距离箱,然后利用反正切解调和相位展算法提取信号的相位。在呼吸波形分离阶段,一般采用线性滤波波器如低通滤波器分离出粗略的呼吸波形,并进一步分析以得到呼吸率等信息。
3、目前关于雷达监测呼吸的研究仍然存在一些挑战和不足:(1)由于人体是一个散射面,因此占据多个距离箱,无法精准确定哪些距离箱存在呼吸运动,因此目前的很多方法根据经验选择一个距离箱的雷达信号无法保证呼吸信息的完整性。(2)由于相位解调方法的本质是提取雷达复数信号的i/q分量在复平面所构成向量的夹角,丢弃了i/q分量的幅值信息,在一定程度上会降低呼吸监测的精度。(3)雷达接收的信号是由呼吸信号、心跳信号以及人体随机运动信号高度非线性混合而成,因此基于线性滤波的方法无法有效提取细粒度呼吸波形。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种基于mimo毫米波雷达的细粒度呼吸波形重构方法,该方法设计了基于深度学习的模型iq-transformer,旨在从多个距离箱的雷达信号i/q分量中,以非线性的方式重构出细粒度呼吸波形。
2、为了达到上述目的,本发明是通过以下技术方案实现的:
3、本发明是一种基于多输入输出(multiple input-multiple output,mimo)毫米波雷达的细粒度呼吸波形重构方法,具体包含以下步骤。
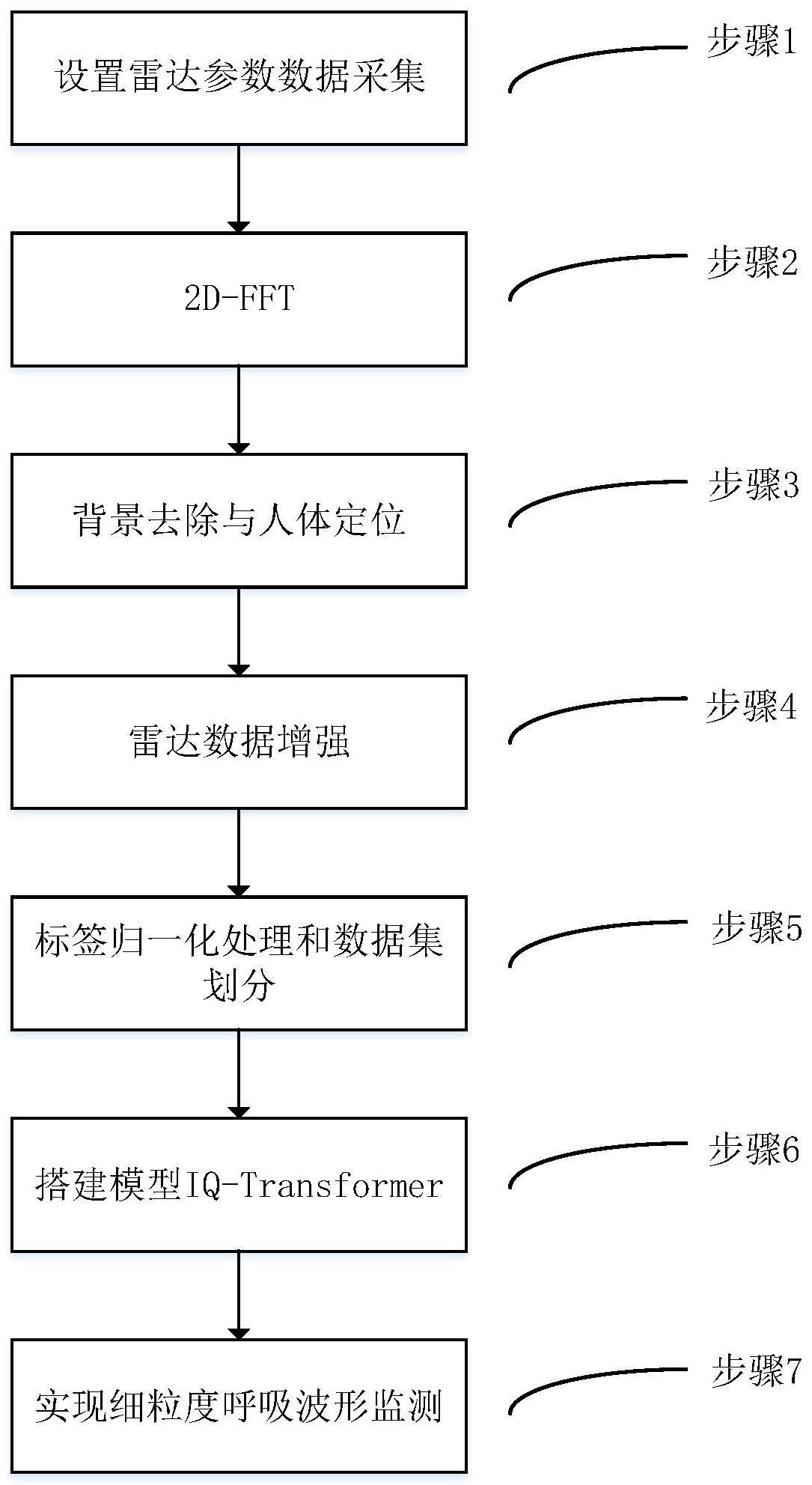
4、步骤1:设置雷达参数,利用雷达和参考设备即呼吸带同步采集多帧雷达阵列数据r和真实呼吸数据ygt。
5、步骤2:利用二维傅里叶变换(2d-fft)算法处理步骤1得到的雷达阵列数据,将雷达扫射区域中的目标隔离到不同的距离-方位箱(range-amuzith bin)中,得到时间-距离-方位雷达矩阵r。
6、步骤3:利用回环滤波器,沿慢时间维度去除r中静态物体的反射信号,并利用2d-cfar(constant false alarm rate,恒虚警率)算法定位人体区域雷达数据r^。
7、步骤4:使用基于旋转的数据增强算法,对r^中的i/q(in-phase/quadrature,同向/正交)分量进行旋转处理,以实现数据集的扩充。
8、步骤5:标签归一化处理和数据集划分。将真实呼吸数据ygt进行归一化,利用滑动窗口截取同一时间段的雷达数据r^与归一化后的真实呼吸数据构成输入-标签样本对,并按照4:1的比例划分训练集和测试集。
9、步骤6:搭建基于transformer模型注意力机制的模型iq-transformer,利用损失函数和划分的训练集进行网络参数的训练,并根据测试集的效果保存模型参数。
10、步骤7:将待预测的雷达数据输入训练好的网络模型,实现细粒度呼吸监测。
11、本发明的进一步改进在于:所述步骤1的雷达参数具体设置为:
12、(1)雷达帧率设置为fs=50帧/秒,采样点数为n=256,雷达的发射天线个数和接收天线个数分别为ntx和nrx,构成了k个水平阵列,即k=ntx×nrx;
13、(2)每次采集一分钟m帧数据,由于fs=50帧/秒,因此m=3000,参考设备的帧率设置与雷达帧率一致。
14、本发明的进一步改进在于:所述步骤1中,利用雷达和参考设备同步采集多帧雷达阵列数据r和真实呼吸数据ygt具体包括如下步骤为:
15、步骤1-1、mimo雷达连续发射线性调频(chirp)信号,然后通过混频器将接收信号和发射信号组合得到了原始雷达数据r(m,n,k)∈cm×n×k,它是一个三维阵列矩阵,表示为:
16、
17、其中,α是衰减系数,fs是雷达采样率,t是斜坡时间段,n=1,2,…,n表示快时间指数,m=1,2,…,m表示慢时间指数,c表示光速,r0表示胸部到雷达的距离,δrm表示胸部在第m帧时间戳的位移ej表示的是复指数形式,λ表示的是电磁波波长;
18、步骤1-2、在受试者身上绑上参考设备,与雷达同步启动,采集相同帧数的真实呼吸数据ygt∈r1×m。
19、本发明的进一步改进在于:所述步骤2具体为:对三维阵列矩阵r(m,n,k)中的n和k两个维度执行二维傅里叶变换(range-fft和angle-fft)得到时间-距离-方位雷达矩阵r(m,n,k),表示为:
20、
21、其中:e-j相当于虚部从正变成了负。
22、本发明的进一步改进在于:所述步骤3具体包括如下步骤:
23、步骤3-1、在步骤2中得到了时间-距离-方位雷达矩阵r(m,n,k),假设每帧的静态背景b(m,n,k),表示为:
24、
25、其中:β表示为超参数,根据经验设置为0.9。
26、步骤3-2、将每一帧时间-距离-方位雷达矩阵r(m,n,k)减去对应的静态背景b(m,n,k)以实现背景去除并得到矩阵r-(m,n,k):
27、
28、其中:m表示为总帧数。
29、步骤3-3、利用2d-cfar技术检测r-(m,n,k)的峰值,并选取时间-距离-方位雷达矩阵r(m,n,k)对应的峰值位置附近的8×8个距离-方位箱,得到人体区域雷达数据r^(m,n,k)。
30、本发明的进一步改进在于:所述步骤4具体包括如下步骤:
31、步骤4-1、步骤3得到的人体区域r^(m,n,k)是一个复数矩阵,分别提取该矩阵的i/q分量,其中i/q分量表示复数的实部和虚部,得到两个实数矩阵ri^(m,n,k)和rq^(m,n,k)∈rm×8×8;
32、步骤4-2、对步骤4-1得到的两个实数矩阵ri^(m,n,k)和rq^(m,n,k)∈rm×8×8进行转操作得到旋转后的i/q分量,表示为:
33、
34、其中,θ是旋转角度。
35、本发明的进一步改进在于:所述步骤5具体包括如下步骤:
36、步骤5-1、在利用人体定位算法得到的人体区域雷达数据r^(m,n,k)上使用10s的时间窗口m’=512进行滑动,其中滑动步长设置为5s,采用步骤4的数据增强方法对该时间窗口的两个实数矩阵ri^(m,n,k)和rq^(m,n,k)∈r512×8×8进行数据增强,将ri^(m,n,k)和rq^(m,n,k)两个实数矩阵拼接并最终得到神经网络的雷达数据输入x∈r2×512×8×8;
37、步骤5-2、使用相同的时间窗口对参考设备采集的真实呼吸数据ygt进行划分,并使用robust标准化方法对真实呼吸数据ygt进行标准化,最终生成雷达数据输入—参考设备标签样本对;
38、步骤5-3、对采集的雷达数据输入—参考设备标签样本对按照4:1的比例划分训练集和测试集。
39、本发明的进一步改进在于:所述步骤6中的所述iq-transformer模型包括浅层骨干网络、编码层和解码层,具体的:
40、所述浅层骨干网络用于前期提取隐藏特征,它包括3个3d卷积模块和一个下采样层,每一个3d卷积模块都由一个3d卷积核、归一化层batchnorm和激活函数relu组成,所述下采样层是一个3d卷积核,最终浅层骨干网络提取的隐藏特征为xbone∈r96×64×4×4;
41、所述编码层由transformer的l个encoder层组成,每个encoder层包含了一个自注意力模块和前馈神经网络层,且均引入残差机制,首先将隐藏特征后面3个维度展平成xtube,形成多个管道令牌,所述自注意力模块将管道令牌映射成key(k)、query(q)和value(v)∈r96×1024,并利用k和q的相似性产生注意力分数,最后与v点乘得到自注意力,即自注意力模块的输出,表示为:
42、
43、其中σ是比例因子;
44、所述前馈神经网络层由两个全连接层组成,中间有一层relu激活函数,并且具有残差结构,自注意力模块的输出经过前馈神经网络层得到第一个transformer encoder的输出,经过后续的l-1个transformer encoder并最终得到了编码层的输出xenc,为了保持与输入维度的一致性,将xenc的维度调整与xbone保持一致。
45、所述解码层由上采样层和预测层构成,将编码层输出的xenc映射到真实呼吸数据ygt,所述上采样层由3个上采样函数upsample组成,只对时间维度进行上采样,聚合所有距离-方位箱的特征,得到xagg∈r96×512,表示为:
46、xagg=average(upsample(xenc),axis=2,3)
47、其中:upsample表示上采样,average表示取平均,axis表示取平均的维度;所述预测层由一个全连接层linear构成,xagg经过所述预测层得到iq-transformer的预测ypred∈r1×512,表示为:
48、ypred=wp×xagg
49、其中,wp∈r1×96。
50、本发明的进一步改进在于:在所述步骤6中,利用损失函数对划分的训练集训练,进行网络参数的训练,并根据测试集的效果保存模型参数,具体为:
51、步骤6-1、损失函数loverall联合了均方差损失函数lrc和负皮尔逊损失函数lnp对模型参数进行训练,表示为:
52、loverall=lrc+γ·lnp
53、其中,γ表示损失权重;
54、步骤6-2、选择均方差损失函数lrc作为呼吸波形重构损失lrc,表示为:
55、
56、步骤6-3、引入负皮尔逊损失函数lnp对网络预测进行约束,lnp的计算如公式为:
57、
58、皮尔逊系数用来描述两个向量的相似度,介于-1到1之间,负值代表负相关,0代表不相关,正值代表正相关;
59、步骤6-4、在训练集上对iq-transformer进行训练,根据测试集的效果保存最佳模型参数。
60、本发明的有益效果是:
61、(1)本发明利用mimo雷达,将雷达视场角中人体和其余静态物体在距离和方位上进行隔离,有效减少了空间中其余静态物体对人体的干扰。
62、(2)与选取一个距离箱数据的方法相比,本发明充分利用了人体区域周围多个距离箱的数据,有效地增加了呼吸信号信噪比。
63、(3)本发明无需进行相位提取操作,iq-transformer直接从雷达的i/q分量中重构呼吸波形,不仅充分考虑了雷达的幅值信息,同时也减小了算法复杂度。
64、(4)本发明不仅可以提供粗粒度的呼吸率信息,还可以提供细粒度的呼吸波形。
- 还没有人留言评论。精彩留言会获得点赞!