导轨移动式共享充电机器人调度方法、装置、设备及介质与流程
本技术属于新能源汽车充电,尤其涉及导轨移动式共享充电机器人调度方法、装置、设备及介质。
背景技术:
1、目前,随着电动汽车的数量不断增多,充电桩的需求也会随之增大。如果给每台电动汽车或每个停车位都设置充电桩则会造成极大的资源浪费,通过导轨移动式共享充电机器人(即移动充电桩)对电动汽车进行充电可以实现一台充电桩对多个电动汽车进行供电以解决充电桩和电动汽车数量不匹配的问题。目前的方案是,若用户想要充电,那么首先需要到达停车场,然后使用手机扫描停车位上的二维码,扫描二维码手机会获得该二维码对应的停车位的位置且手机会显示所有处于空闲状态的导轨移动式共享充电机器人,然后用户从中选择一个导轨移动式共享充电机器人前往停车位进行充电。当导轨移动式共享充电机器人检测到其被选择后,会根据接收到的停车位的位置信息前往停车位。这也意味着这种方式需要用户等待机器人来到停车位才能进行充电,不能像固定桩一样不需要等待。
2、上述内容仅用于辅助理解本技术的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本技术的主要目的为提供一种导轨移动式共享充电机器人调度方法,旨在解决现有方式需要用户等待机器人来到停车位才能进行充电,不能像固定桩一样不需要等待的技术问题。
2、实现上述申请目的,本技术第一方面提出一种导轨移动式共享充电机器人调度方法,所述导轨移动式共享充电机器人可在导轨上移动,所述导轨布设在停车场的顶部,所述方法包括:
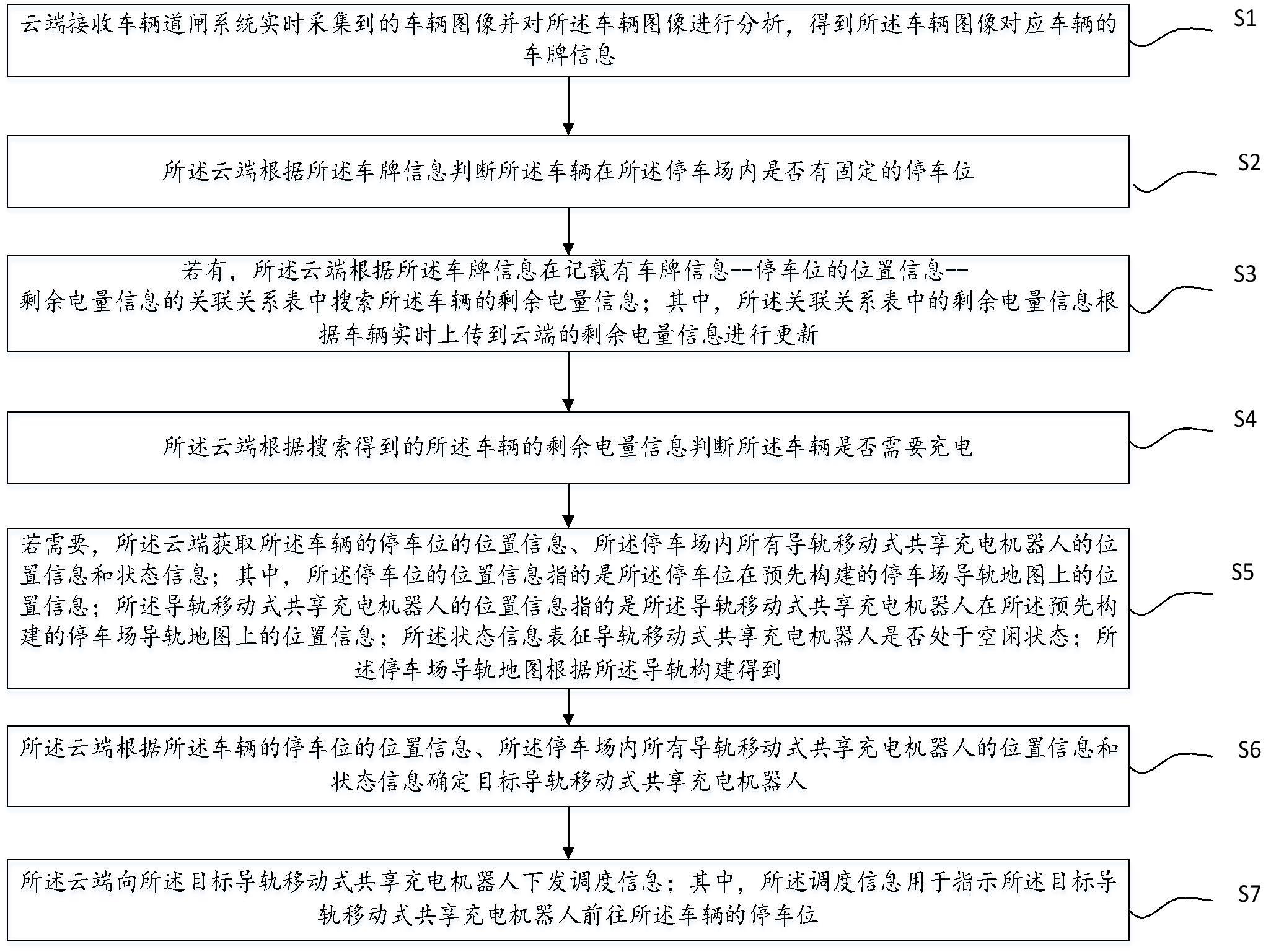
3、云端接收车辆道闸系统实时采集到的车辆图像并对所述车辆图像进行分析,得到所述车辆图像对应车辆的车牌信息;
4、所述云端根据所述车牌信息判断所述车辆在所述停车场内是否有固定的停车位;
5、若有,所述云端根据所述车牌信息在记载有车牌信息--停车位的位置信息--剩余电量信息的关联关系表中搜索所述车辆的剩余电量信息;其中,所述关联关系表中的剩余电量信息根据车辆实时上传到云端的剩余电量信息进行更新;
6、所述云端根据搜索得到的所述车辆的剩余电量信息判断所述车辆是否需要充电;
7、若需要,所述云端获取所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息;其中,所述停车位的位置信息指的是所述停车位在预先构建的停车场导轨地图上的位置信息;所述导轨移动式共享充电机器人的位置信息指的是所述导轨移动式共享充电机器人在所述预先构建的停车场导轨地图上的位置信息;所述状态信息表征导轨移动式共享充电机器人是否处于空闲状态;所述停车场导轨地图根据所述导轨构建得到;
8、所述云端根据所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息确定目标导轨移动式共享充电机器人;
9、所述云端向所述目标导轨移动式共享充电机器人下发调度信息;其中,所述调度信息用于指示所述目标导轨移动式共享充电机器人前往所述车辆的停车位。
10、进一步的,所述云端根据搜索得到的所述车辆的剩余电量信息判断所述车辆是否需要充电的步骤包括:
11、所述云端根据所述车牌信息获取对应的充电阈值;其中,所述充电阈值由用户通过用户终端设置且上传到云端;
12、所述云端判断搜索得到的所述车辆的剩余电量信息是否小于所述充电阈值;
13、若是,则判定为所述车辆需要充电;
14、若否,则判定为所述车辆不需要充电。
15、进一步的,所述云端根据所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息确定目标导轨移动式共享充电机器人的步骤包括:
16、所述云端根据所述停车场内所有导轨移动式共享充电机器人的状态信息确定所有处于空闲状态的导轨移动式共享充电机器人;
17、判断处于空闲状态的导轨移动式共享充电机器人的数量是否大于1;
18、若大于,则根据所述处于空闲状态的导轨移动式共享充电机器人的位置信息以及所述车辆的停车位的位置信息计算所述处于空闲状态的导轨移动式共享充电机器人到所述车辆的停车位的路程距离;
19、根据所有处于空闲状态的导轨移动式共享充电机器人到所述车辆的停车位的路程距离确定最短路程距离;
20、将所述最短路程距离对应的导轨移动式共享充电机器人确定为所述目标导轨移动式共享充电机器人。
21、进一步的,所述导轨地图的导轨线路上设置有多个里程标识点,所述导轨线路包括主导轨线路和分支导轨线路,所述分支导轨线路上的里程标识点和停车位的位置信息一一对应,所述根据所述处于空闲状态的导轨移动式共享充电机器人的位置信息以及所述车辆的停车位的位置信息计算所述处于空闲状态的导轨移动式共享充电机器人到所述车辆的停车位的路程距离的步骤包括:
22、将所述处于空闲状态的导轨移动式共享充电机器人的位置信息作为起点的位置信息,将所述车辆的停车位的位置信息作为终点的位置信息,遍历所述起点到所述终点之间的所有里程标识点,当遇到分支导轨线路时继续遍历分支导轨线路,直到找到所有到达所述终点的所有路径信息;
23、比对各所述路径信息的里程大小,得到里程最短的路径;
24、将所述里程最短的路径作为所述处于空闲状态的导轨移动式共享充电机器人到所述车辆的停车位的路程距离。
25、进一步的,所述里程标识点包括二维码和rfid标签。
26、进一步的,所述调度信息包括所述目标导轨移动式共享充电机器人到所述车辆的停车位的最短路径信息;其中,最短路径信息指的是路程距离最短的路径信息。
27、进一步的,所述目标导轨移动式共享充电机器人包括卷线机构和充电手柄,所述云端向所述目标导轨移动式共享充电机器人下发调度信息的步骤之后,还包括:
28、所述云端将所述目标导轨移动式共享充电机器人的唯一标识信息下发到与所述车牌信息关联的用户终端;
29、所述云端接收用户终端发送的充电指令;其中,所述充电指令携带所述目标导轨移动式共享充电机器人的唯一标识信息;
30、所述云端根据所述唯一标识信息将所述充电指令下发到所述目标导轨移动式共享充电机器人;
31、所述目标导轨移动式共享充电机器人在到达所述车辆的停车位后,响应于所述充电指令,控制所述卷线机构下放所述充电手柄,以使用户将所述充电手柄插到车辆的充电口进行充电。
32、第二方面,本技术实施例提供一种导轨移动式共享充电机器人调度装置,所述导轨移动式共享充电机器人可在导轨上移动,所述导轨布设在停车场的顶部,所述装置应用于云端,包括:
33、接收模块,用于接收车辆道闸系统实时采集到的车辆图像并对所述车辆图像进行分析,得到所述车辆图像对应车辆的车牌信息;
34、第一判断模块,用于根据所述车牌信息判断所述车辆在所述停车场内是否有固定的停车位;
35、搜索模块,用于若有,根据所述车牌信息在记载有车牌信息-停车位的位置信息-剩余电量信息的关联关系表中搜索所述车辆的剩余电量信息;其中,所述关联关系表中的剩余电量信息根据车辆实时上传到云端的剩余电量信息进行更新;
36、第二判断模块,用于根据搜索得到的所述车辆的剩余电量信息判断所述车辆是否需要充电;
37、获取模块,用于获取所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息;其中,所述停车位的位置信息指的是所述停车位在预先构建的停车场导轨地图上的位置信息;所述导轨移动式共享充电机器人的位置信息指的是所述导轨移动式共享充电机器人在所述预先构建的停车场导轨地图上的位置信息;所述状态信息表征导轨移动式共享充电机器人是否处于空闲状态;所述停车场导轨地图根据所述导轨构建得到;
38、确定模块,用于根据所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息确定目标导轨移动式共享充电机器人;
39、调度信息下发模块,用于向所述目标导轨移动式共享充电机器人下发调度信息;其中,所述调度信息用于指示所述目标导轨移动式共享充电机器人前往所述车辆的停车位。
40、第三方面,本技术实施例提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上述任一项所述的导轨移动式共享充电机器人调度方法的步骤。
41、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上述任一项所述的导轨移动式共享充电机器人调度方法的步骤。
42、本技术实施例通过接收车辆道闸系统实时采集到的车辆图像并对所述车辆图像进行分析,得到所述车辆图像对应车辆的车牌信息;判断所述车辆在所述停车场内是否有固定的停车位;若有,根据所述车牌信息在记载有车牌信息--停车位的位置信息--剩余电量信息的关联关系表中搜索所述车辆的剩余电量信息;根据搜索得到的所述车辆的剩余电量信息判断所述车辆是否需要充电;若需要,获取所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息;根据所述车辆的停车位的位置信息、所述停车场内所有导轨移动式共享充电机器人的位置信息和状态信息确定目标导轨移动式共享充电机器人;向所述目标导轨移动式共享充电机器人下发调度信息;其中,所述调度信息用于指示所述目标导轨移动式共享充电机器人前往所述车辆的停车位,如此,能够在车辆未到达停车位前,提前启动充电机器人前往停车位,相比于现有方法需要用户到达停车位后,进行一系列操作选择充电机器人前往停车位充电,节省了用户时间等待充电机器人的时间,即移动式共享充电机器人同样具有固定充电桩的优势,此外还简化了用户充电操作流程,提高了用户体验。
- 还没有人留言评论。精彩留言会获得点赞!