一种漂浮式海上风力机的耦合协同仿真计算方法
本发明属于风力发电,涉及一种基于人工智能的风力机多学科耦合仿真计算方法,特别涉及一种漂浮式海上风力机的耦合协同仿真计算方法。
背景技术:
1、风电机组零部件众多,包括叶片、支撑结构、传动系统、发电机、控制系统与并网系统等,涉及的技术领域涵盖气动、水动、噪声、结构、振动、材料、控制、电气等多个学科,是典型的学科交叉研究领域,需要多学科、多精度、高可靠、系统化的仿真设计工具的支撑。
2、现阶段海上风电开发风电机组正向“超大型、深远海、漂浮式、创新型”方向发展。随着开发的深入,海上大型漂浮式风力机叶片与塔筒的尺寸逐渐增大,其柔性显著增加;同时,海上复杂的风-浪-流耦合条件下,漂浮式风电机组的运动自由度多,风电机组的气动、气弹特性的非定常性也显著增加。
3、当前风力机的数值耦合仿真计算随着风电机组的大型化发展逐渐出现一些问题,主要问题有:(1)基于叶素动量理论的主流风电商业软件已不能满足仿真设计需求;(2)传统的基于松耦合的多学科迭代方法在学科数量多的情况下耦合效率低、容易发散;(3)紧耦合的方法开发难度大,不易进行可靠性验证。
4、现有技术中,风力机与人工智能相结合的研究方案中,人工智能技术多应用于风力机发电量预测、故障监测以及风力机俯仰、偏航的自动控制领域,而在复杂工况条件下风力机的多自由度运动计算中的应用较少。当漂浮式海上风力机实际运行时,风-浪-流的耦合作用会使海上风力机浮式平台产生六个自由度方向的运动,风力机多自由度运动条件下的流固耦合研究需要在进行流场物理量与结构场物理量求解的基础上,同时考虑流场与结构场接触面上物理量的交换与网格变形所带来的问题,具有较大的计算量和迭代收敛难度。
5、发明目的
6、本发明的目的就是应对现有技术中所存在的问题,提供一种漂浮式海上风力机的耦合协同仿真计算方法,通过使用人工智能作为多学科物理量之间耦合的桥梁,避免了不同学科之间计算的物理场的网格匹配、数据传递导致的计算发散问题,克服了松耦合易发散与紧耦合计算量过大的缺点,能够更快速地计算复杂工况条件下风力机的流固耦合问题。
技术实现思路
1、本发明公开了一种漂浮式海上风力机的耦合协同仿真计算方法,包括以下步骤:
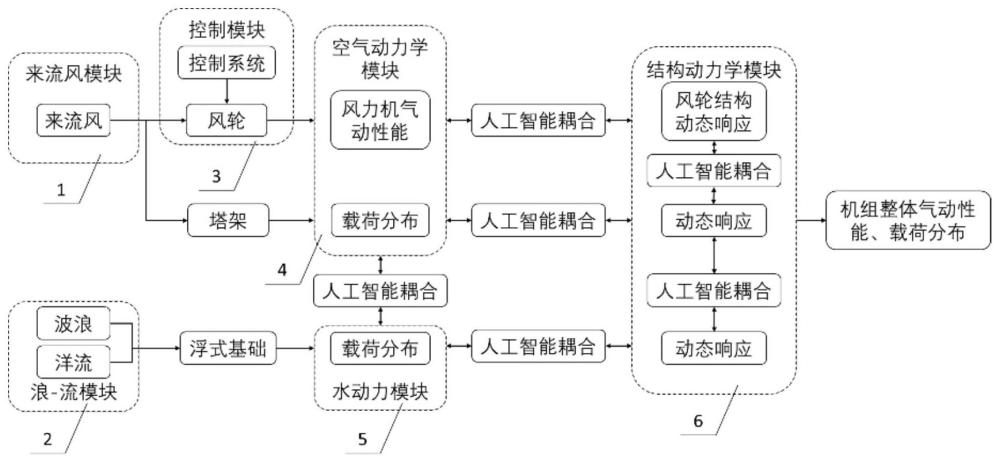
2、步骤1、构建多个耦合模块,包括包含来流风模块(1)和浪-流模块(2)的环境参数模块、处理风电机风轮的控制模块(3)、处理风力机气动性能的空气动力学模块(4)、处理浮式基础载荷分布的水动力模块(5)和处理风力机构动态响应的结构动力学模块(6);
3、步骤2、设置风力机耦合计算的边界条件,模拟漂浮式海上风力机的六自由度运动工况,将风-浪-流的环境条件进行参数化处理,作为计算的初始条件,并确定后续耦合计算的输入参数;
4、步骤3、根据不同环境变量确定不同学科的求解方法,其中包括风力机的气动计算、结构计算和水动计算三个部分;
5、步骤4、使用人工智能模型对所述环境参数模块、空气动力学模块(4)、水动力模块(5)和结构动力模块(6)进行耦合计算,得到漂浮式海上风力机的机组整体气动性能参数和载荷分布。
6、优选地,步骤2中,来流风部分采用海上大气剪切来流条件,风切变公式表示为如式(1)所示:
7、
8、式(1)中,vz为距地高度z处的风速,v0为风力机轮毂高度处的风速,h为风力机轮毂高度,α为风速廓线指数;
9、波浪载荷部分采用势流理论,其一阶速度势φ满足拉普拉斯方程,表示为如式(2)所示:
10、
11、流力部分采用水流力计算公式,表示为如式(3)所示:
12、
13、式中(3)中,fcur为流力,cd为拖曳力系数,a为水下部分迎流面积,v为相对流速,β为流向与风力机迎流方向的夹角。
14、优选地,步骤3中,风力机尾流的气动计算采用自由涡尾迹方法;漂浮式海上风力机的叶片为柔性结构,多柔体系统在考虑载荷和约束的基础上,包含了弹性变形与大范围运动的耦合,对风力机多柔体系统的结构计算采用几何精确梁方法;海上波浪运动与大气流动的耦合模拟为两相流,对水动部分的计算采用势流方法。
15、优选地,步骤4中,耦合求解方法基于人工智能,应用人工神经网络算法来识别来流风速u、波浪速度势φ、流力fcur、载荷力f、结构位移量δ的非线性关系曲线,表示为如式(4)所示:
16、p=p(u,φ,fcur,f,δ) (4);
17、所述人工神经网络由输入层(7)、隐含层(8)和输出层(9)的三层网络结构和bp网络算法组成,其中输入层节点包括来流风速u、波浪速度势φ、流力fcur、载荷力f、结构位移量δ;隐含层节点数不小于11;输出层节点为风力机气动响应与载荷分布。
18、优选地,所述漂浮式海上风力机的耦合协同仿真计算方法适用于多种环境条件影响下的风力机耦合响应,通过模拟复杂海浪、海流模型,仿真计算极端波浪、浅水非线性波浪对漂浮式海上风力机的影响。
19、优选地,所述漂浮式海上风力机的耦合协同仿真计算方法在耦合模型中加入复杂环境条件建模方法,考虑非线性滞回效应的岩土载荷模型与大气湍流风的影响,建立地震、台风条件下对风力机的作用机制,计算耦合模型与叶片和塔架的气动载荷分布。
技术特征:
1.一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,步骤2中,来流风部分采用海上大气剪切来流条件,风切变公式表示为如式(1)所示:
3.根据权利要求1所述的一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,步骤3中,风力机尾流的气动计算采用自由涡尾迹方法;漂浮式海上风力机的叶片为柔性结构,多柔体系统在考虑载荷和约束的基础上,包含了弹性变形与大范围运动的耦合,对风力机多柔体系统的结构计算采用几何精确梁方法;海上波浪运动与大气流动的耦合模拟为两相流,对水动部分的计算采用势流方法。
4.根据权利要求1所述的一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,步骤4中,耦合求解方法基于人工智能,应用人工神经网络算法来识别来流风速u、波浪速度势φ、流力fcur、载荷力f、结构位移量δ的非线性关系曲线,表示为如式(4)所示:
5.根据权利要求1所述的一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,所述漂浮式海上风力机的耦合协同仿真计算方法适用于多种环境条件影响下的风力机耦合响应,通过模拟复杂海浪、海流模型,仿真计算极端波浪、浅水非线性波浪对漂浮式海上风力机的影响。
6.根据权利要求1所述的一种漂浮式海上风力机的耦合协同仿真计算方法,其特征在于,所述漂浮式海上风力机的耦合协同仿真计算方法在耦合模型中加入复杂环境条件建模方法,考虑非线性滞回效应的岩土载荷模型与大气湍流风的影响,建立地震、台风条件下对风力机的作用机制,计算耦合模型与叶片和塔架的气动载荷分布。
技术总结
本发明公开了一种漂浮式海上风力机的耦合协同仿真计算方法,基于人工智能模型,选取环境条件的输入参数,通过多学科方法分别计算气动、水动和结构三部分物理场的物理量,构建多自由度运动工况条件下的风力机物理场,通过人工智能模型对风机‑浮体‑系泊‑锚固结构刚柔耦合动力学模型进行耦合计算,构建整机仿真系统协同求解构架;应用人工神经网络算法来耦合计算环境条件中的物理参数对风力机的耦合作用,最终输出风力机的气动响应与载荷分布。本发明可用于研究多种环境条件影响下的风力机耦合响应,模拟海洋特性的复杂海浪、海流模型,研究极端波浪、浅水非线性波浪等复杂波浪对漂浮式海上风力机的影响。
技术研发人员:王晓东,唐润东,娄刻强
受保护的技术使用者:华北电力大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!