盾尾变形预测方法、装置、设备及可读存储介质与流程
本文实施例涉及隧道施工设备检测,尤其涉及一种盾尾变形预测方法、装置、设备及可读存储介质。
背景技术:
1、本部分的描述仅提供与本文实施例公开相关的背景信息,而不构成现有技术。
2、在实际盾构的施工过程中,因地下环境特殊,盾构机所施工的隧道容易受到土体岩石的侵入,高压水体的影响,同时还会受到盾构机推进速度的影响,使得盾尾处容易发生变形的情况;在实际过程中,该变形一般为椭圆变形,盾尾变形后,会使得隧道在初装管片时难以成环,增加了管片的拼装难度,或者甚至导致无法拼装等问题,会严重影响正常施工质量和施工进度。所以在盾构机施工过程中,行业普遍会采用一系列方法对盾尾变形量进行监测,然后对变形的盾尾进行及时矫正处理,避免发生进一步侵入。
3、现有监测手段较为单一,有采用光栅应变片进行监测相对变形量的监测系统,但该方法无法实际得到精准变形量存在一定的误差以及需要随时停工进行测量,也有采用激光测量变形距离的装置,然而实际施工过程中随时会有设备机,支管在主梁上移动,而遮挡激光测量的问题,无法做到实际的测量效果;另外,还有采用滑块、弹簧或拉力器等设备进行物理测量的装置,但该些装置可靠性较低,容易在隧道施工过程中损坏,故使用率较低。
4、应该注意,上面对技术背景的介绍只是为了方便对本文实施例的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本文实施例的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现思路
1、本文实施例的目的是提供一种盾尾变形预测方法、装置、设备及可读存储介质,解决了在隧道施工设备检测技术领域中,需要高可靠性,且精准监测盾尾内壁的变形量以及距离变化值的问题。
2、本文实施例的上述实施目的主要由以下技术方案来实现:
3、一方面,本文实施例提供一种盾尾变形预测方法,包括:
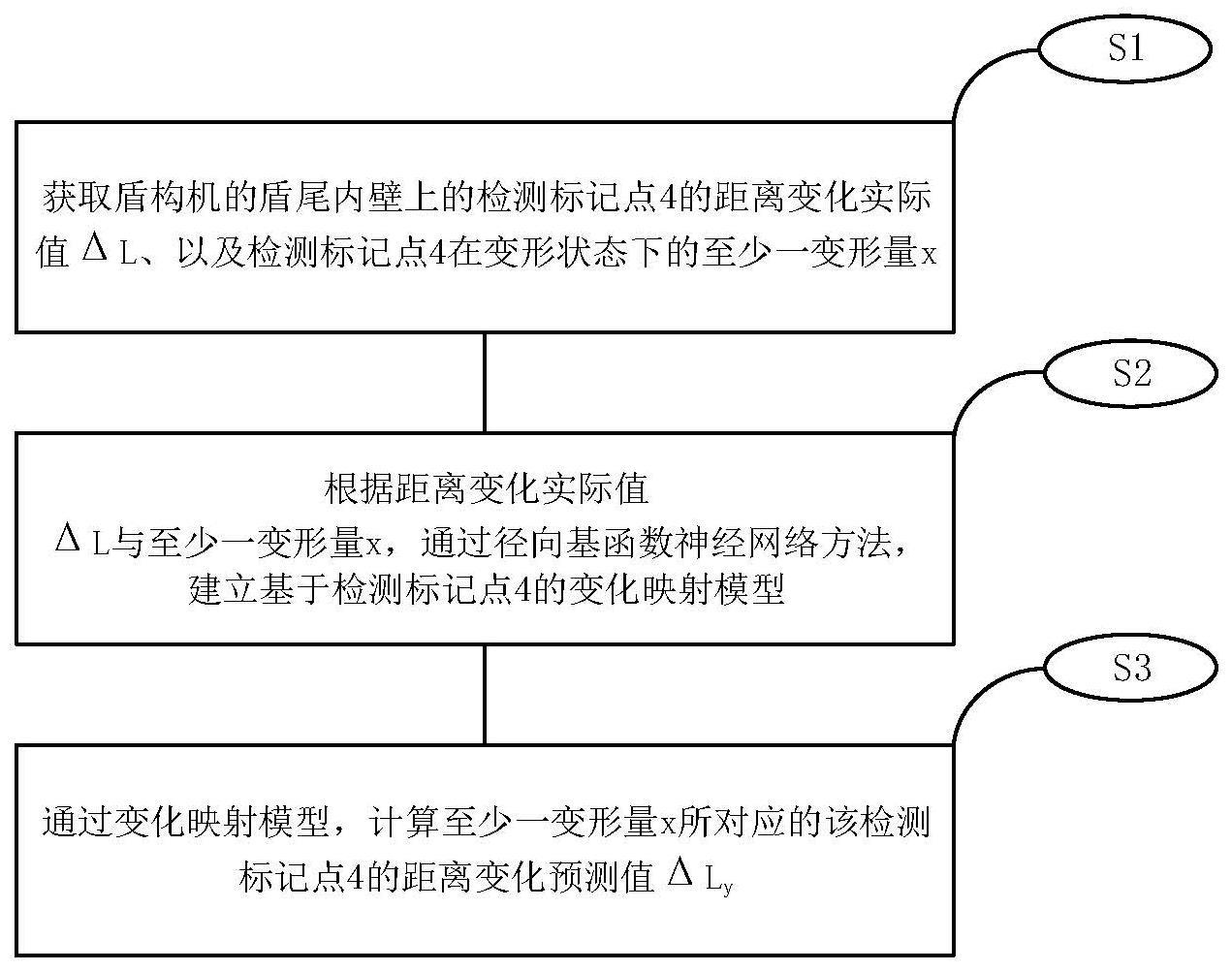
4、获取盾构机的盾尾内壁上的检测标记点的距离变化实际值、以及所述检测标记点在变形状态下的至少一变形量;
5、根据所述距离变化实际值与至少一所述变形量,通过径向基函数神经网络方法,建立基于所述检测标记点的变化映射模型;
6、通过所述变化映射模型,计算至少一所述变形量所对应的所述检测标记点的距离变化预测值。
7、在一具体实施方式中,还包括:
8、设定误差评价阈值,根据所述距离变化预测值与所述距离变化实际值的差值绝对值,比较所述差值绝对值和所述误差评价阈值;
9、若所述差值绝对值大于所述误差评价阈值,则调整所述变化映射模型。
10、在一具体实施方式中,根据所述距离变化实际值与至少一所述变形量,通过径向基函数神经网络方法,建立基于所述检测标记点的所述变化映射模型,包括:
11、至少一所述变形量包括沿隧道轴向方向的第一变形量与沿隧道周向方向的第二变形量;
12、根据所述第一变形量和所述第二变形量,采用高斯函数作为径向基函数,确定隐含层神经网络的高斯函数的值;
13、基于所述高斯函数的值、所述第一变形量对应的权重系数、以及所述第二变形量对应的权重系数,构建所述变化映射模型。
14、在一具体实施方式中,根据所述第一变形量和所述第二变形量,采用高斯函数作为径向基函数,确定隐含层神经网络的高斯函数的值,包括:
15、设定隐含层的神经元数量,通过聚类方法,确定各所述神经元的中心;
16、根据所述第一变形量与各所述神经元的中心的欧几里得距离、以及所述第二变形量与各所述神经元的中心的欧几里得距离,计算所述高斯函数的值。
17、在一具体实施方式中,设定隐含层的神经元数量,通过聚类方法,确定各所述神经元的中心,包括:
18、基于隐含层的所述神经元数量,建立向量空间并设定同等数量的族;
19、根据k-means聚类算法,计算各所述族的中心;
20、将各所述族的中心作为隐含层的各所述神经元的中心。
21、在一具体实施方式中,还包括:
22、基于所述检测标记点所对应的多个所述距离变化实际值和多个所述距离变化预测值,将部分所述距离变化预测值替换部分所述距离变化实际值,形成所述检测标记点的距离变化值数据组;
23、去除所述距离变化值数据组中的最大值与最小值后,计算所述距离变化值数据组中的剩余距离变化值数据的距离变化值平均值;
24、比较所述距离变化值平均值与安全变形范围,若所述距离变化值平均值大于所述安全变形范围,则输出警报。
25、另一方面,本文实施例还提供一种盾尾变形预测装置,包括:
26、获取单元,获取盾构机的盾尾内壁上的检测标记点的距离变化实际值、以及所述检测标记点在变形状态下的至少一变形量;
27、建模单元,根据所述距离变化实际值与至少一所述变形量,通过径向基函数神经网络方法,建立基于所述检测标记点的变化映射模型;
28、计算单元,通过所述变化映射模型,计算至少一所述变形量所对应的所述检测标记点的距离变化预测值。
29、在一具体实施方式中,还包括:
30、误差评价单元,设定误差评价阈值,根据所述距离变化预测值与所述距离变化实际值的差值绝对值,比较所述差值绝对值和所述误差评价阈值;其中,若所述差值绝对值大于所述误差评价阈值,则调整所述变化映射模型。
31、再一方面,本文实施例还提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述盾尾变形预测方法。
32、最后,本文实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述盾尾变形预测方法。
33、与现有技术相比,本文实施例所述的技术方案具有以下特点和优点:
34、1、本文实施例能够通过检测模块直接监测所述掘进机盾尾的变形量与距离变化值,并在监测模块被遮挡的情况下,通过预测方法获取距离变化值数据,采用本文实施例提供的盾尾变形检测方法,可以避免在拼装机工作过程中,或掘进过程中拼装机或油缸遮挡检测模块的直接监测视野导致无法获悉距离变形数据,实现全时的直接数据监测。
35、2、本文实施例采用两种监测方式,且直接装载在主梁和盾尾内壁上,避免了复杂结构影响盾构机的通行空间,且采用双保险监测方法,具有较高的可靠性,避免了因地下隧道施工环境复杂导致的监测机构失效等风险。
技术特征:
1.一种盾尾变形预测方法,其特征在于,包括:
2.根据权利要求1所述的盾尾变形预测方法,其特征在于,还包括:
3.根据权利要求1或2所述的盾尾变形预测方法,其特征在于,根据所述距离变化实际值与至少一所述变形量,通过径向基函数神经网络方法,建立基于所述检测标记点的所述变化映射模型,包括:
4.根据权利要求3所述的盾尾变形预测方法,其特征在于,根据所述第一变形量和所述第二变形量,采用高斯函数作为径向基函数,确定隐含层神经网络的高斯函数的值,包括:
5.根据权利要求4所述的盾尾变形预测方法,其特征在于,设定隐含层的神经元数量,通过聚类方法,确定各所述神经元的中心,包括:
6.根据权利要求1或2所述的盾尾变形预测方法,其特征在于,还包括:
7.一种盾尾变形预测装置,其特征在于,包括:
8.根据权利要求7所述的盾尾变形预测装置,其特征在于,还包括:
9.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述盾尾变形预测方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述盾尾变形预测方法。
技术总结
本文实施例提供了一种盾尾变形预测方法、装置、设备及可读存储介质,其中,盾尾变形预测方法包括:获取盾构机的盾尾内壁上的检测标记点的距离变化实际值、以及检测标记点在变形状态下的至少一变形量;根据距离变化实际值与至少一变形量,通过径向基函数神经网络方法,建立基于检测标记点的变化映射模型;通过变化映射模型,计算至少一变形量所对应的该检测标记点的距离变化预测值,发明还提供了一种盾尾变形预测装置、设备及可读存储介质,通过文本实施例,能够实现实时精准地监测实际变形量,避免了隧道内壁塌陷或变形侵入导致的管片安装错位等情形的发生。
技术研发人员:赵春阳,魏晓龙,林福龙,王育文,黄震,王宁,周树亮,王震,马一波,李旭
受保护的技术使用者:中铁工程装备集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!