晶圆缺陷检测方法、系统及存储介质与流程
本技术涉及半导体,尤其涉及一种晶圆缺陷检测方法、系统及存储介质。
背景技术:
1、相关技术中,随着技术的发展,半导体集成电路的精密程度也越来越高,这就对晶圆的质量提出了更高的要求。为了保证晶圆的质量,需要对晶圆进行检测。目前的晶圆检测,通常有两种方式:一个是手动操作检测设备,但是效果并不理想,往往比较费时,人力成本也比较高;另一个是人工智能(ai)检测,该类检测方式为了提高准确率,往往需要较为复杂的算法运算,不利于检测的快速进行,影响检测效率。因此,如何提高晶圆检测效率从而降低成本,成为了亟待解决的技术问题。
技术实现思路
1、本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出了一种晶圆缺陷检测方法、系统及存储介质,能够提高晶圆检测效率并降低成本。
2、根据本技术的第一方面实施例的晶圆缺陷检测方法,包括:
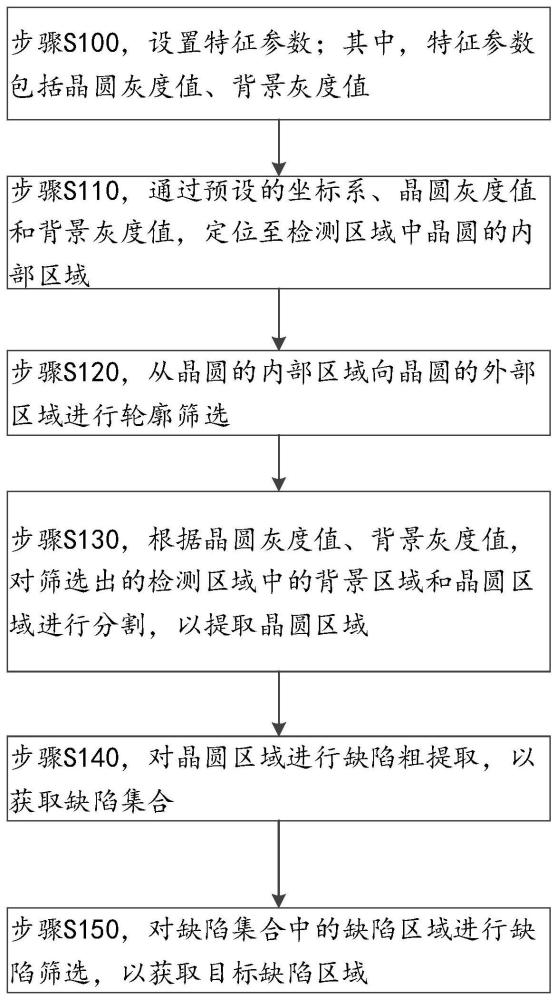
3、设置特征参数;其中,所述特征参数包括晶圆灰度值、背景灰度值;
4、通过预设的坐标系、所述晶圆灰度值和所述背景灰度值,定位至检测区域中晶圆的内部区域;
5、从所述晶圆的内部区域向所述晶圆的外部区域进行轮廓筛选;
6、根据所述晶圆灰度值、所述背景灰度值,对筛选出的检测区域中的背景区域和晶圆区域进行分割,以提取所述晶圆区域;
7、对所述晶圆区域进行缺陷粗提取,以获取缺陷集合;
8、对所述缺陷集合中的缺陷区域进行缺陷筛选,以获取目标缺陷区域。
9、根据本技术实施例的晶圆缺陷检测方法,至少具有如下有益效果:第一步,设置特征参数;其中,特征参数包括晶圆灰度值、背景灰度值;第二步,通过预设的坐标系、晶圆灰度值和背景灰度值,定位至检测区域中晶圆的内部区域;第三步,从晶圆的内部区域向晶圆的外部区域进行轮廓筛选;第四步,根据晶圆灰度值、背景灰度值,对筛选出的检测区域中的背景区域和晶圆区域进行分割,以提取晶圆区域;第五步,对晶圆区域进行缺陷粗提取,以获取缺陷集合;第六步,对缺陷集合中的缺陷区域进行缺陷筛选,以获取目标缺陷区域。本技术的晶圆缺陷检测方法,在设定好晶圆灰度值、背景灰度值并进行定位之后,通过由内到外进行轮廓筛选,一方面,无需另行配置人员进行人工操作,能够有效降低操作成本;另一方面,由内到外的轮廓筛选,能够较大幅度地降低计算量,从而能够快速提取晶圆区域对应的轮廓,进而有效提高晶圆的检测效率。因此,本技术的晶圆缺陷检测方法,能够提高晶圆检测效率并降低成本。
10、根据本技术的一些实施例,所述设置特征参数,包括:
11、获取所述晶圆的类型对应的第一像素,通过所述第一像素设置所述晶圆灰度值;
12、获取所述背景对应的第二像素,通过所述第二像素设置所述背景灰度值。
13、根据本技术的一些实施例,所述特征参数还包括每一缺陷的灰度值波动范围;
14、所述对所述晶圆区域进行缺陷粗提取,以获取缺陷集合,包括:
15、提取无损晶圆的标准灰度值为检测灰度值;
16、根据所述检测灰度值得到气泡的灰度值波动范围、划痕的灰度值波动范围、脏污的灰度值波动范围;
17、根据所述检测灰度值、气泡的灰度值波动范围、划痕的灰度值波动范围、脏污的灰度值波动范围,对所述晶圆区域进行缺陷粗提取,得到气泡区域、划痕区域、脏污区域;
18、将所述气泡区域、所述划痕区域、所述脏污区域确定为缺陷区域,以获取所述缺陷集合;其中,所述缺陷集合包括多个缺陷区域。
19、根据本技术的一些实施例,所述对所述晶圆区域进行缺陷粗提取,以获取缺陷集合,还包括:
20、设定凹痕、凸沿共同的第一角度阈值、第二角度阈值;
21、计算得到所述晶圆区域的边缘中内凹区域所形成的第一夹角、外凸区域所形成的第二夹角;
22、当所述第一夹角大于所述第一角度阈值,则提取所述内凹区域并确定为所述凹痕;
23、当所述第二夹角大于所述第一角度阈值,则提取所述外凸区域并确定为所述凸沿;
24、当所述第一夹角小于所述第二角度阈值,则提取所述内凹区域并确定为所述凹痕;
25、当所述第二夹角小于所述第二角度阈值,则提取所述外凸区域并确定为所述凸沿;
26、将所述凹痕、所述凸沿对应的区域确定为缺陷区域,以获取所述缺陷集合。
27、根据本技术的一些实施例,所述对所述缺陷集合中的缺陷区域进行缺陷筛选,以获取目标缺陷区域,包括:
28、计算所述气泡、所述划痕、所述脏污、所述凹痕、所述凸沿各自所对应的所述缺陷区域的特征参数,通过预设的筛选参数对所述特征参数进行筛选,得到筛选后的所述气泡、所述划痕、所述脏污、所述凹痕、所述凸沿;
29、将筛选后的所述气泡、所述划痕、所述脏污、所述凹痕、所述凸沿确定为目标缺陷区域。
30、根据本技术的一些实施例,所述晶圆缺陷检测方法还包括:
31、将各个所述目标缺陷区域的所述特征参数保存到数据库;其中,所述特征参数包括亮度参数、形状参数;
32、根据缺陷灰度值或所述形状参数,分类型输出所述目标缺陷区域。
33、根据本技术的一些实施例,所述晶圆缺陷检测方法还包括:
34、当两个相邻的所述缺陷区域之间的距离小于预设的距离阈值,将两个相邻的所述缺陷区域合并为一个所述缺陷区域;其中,两个相邻的所述缺陷区域为同一类型的所述缺陷区域。
35、根据本技术的一些实施例,所述特征参数还包括晶圆面积阈值;
36、所述晶圆缺陷检测方法还包括:
37、通过所述晶圆面积阈值选取特定大小的所述晶圆。
38、根据本技术的第二方面实施例的晶圆缺陷检测装置,包括:
39、参数设置模块,用于设置特征参数;其中,所述特征参数包括晶圆灰度值、背景灰度值;
40、定位模块,用于通过预设的坐标系、所述晶圆灰度值和所述背景灰度值,定位至检测区域中所述晶圆的内部区域;
41、轮廓筛选模块,用于从所述晶圆的内部区域向所述晶圆的外部区域进行轮廓筛选;
42、分割模块,用于通过所述晶圆面积阈值选取特定大小的晶圆,并根据所述晶圆灰度值、所述背景灰度值,对筛选出的检测区域中的背景区域和晶圆区域进行分割,以提取所述晶圆区域;
43、缺陷检测模块,用于对所述晶圆区域进行缺陷粗提取,以获取缺陷集合;还用于对所述缺陷集合中的缺陷区域进行缺陷筛选,以获取目标缺陷区域。
44、根据本技术的第三方面实施例的晶圆缺陷检测系统,包括:
45、至少一个存储器;
46、至少一个处理器;
47、至少一个程序;
48、所述程序被存储在所述存储器中,所述处理器执行至少一个所述程序以实现如第一方面实施例所述的晶圆缺陷检测方法。
49、根据本技术的第四方面实施例的计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面实施例所述的晶圆缺陷检测方法。
50、本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!