一种智能电动汽车行驶状态信息估计方法
本发明涉及电动汽车,特别是涉及一种智能电动汽车行驶状态信息估计方法。
背景技术:
1、随着信息和人工智能技术的进步和发展,智能电动汽车越来越受到人们的关注,智能电动汽车具有节能环保、高安全性等优点,是目前实现汽车能源转型的重要手段。其中汽车行驶过程中的主动安全控制是核心问题之一,主动安全控制的首要前提是准确获得汽车当前的状态等重要参数。
2、车辆主动安全控制的前提是准确地获取车辆行驶状态信息。然而由于技术限制或部分传感器价格昂贵,或信号受外界干扰影响较大,导致车辆行驶状态信息难以直接测量。因此,如何根据部分现有低成本的传感器来准确的估计这些不易测量的行驶状态信息,是本领域技术人员需要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种智能电动汽车行驶状态信息估计方法,以实现智能电动汽车行驶状态信息的有效实时估计。
2、一种智能电动汽车行驶状态信息估计方法,包括以下步骤:
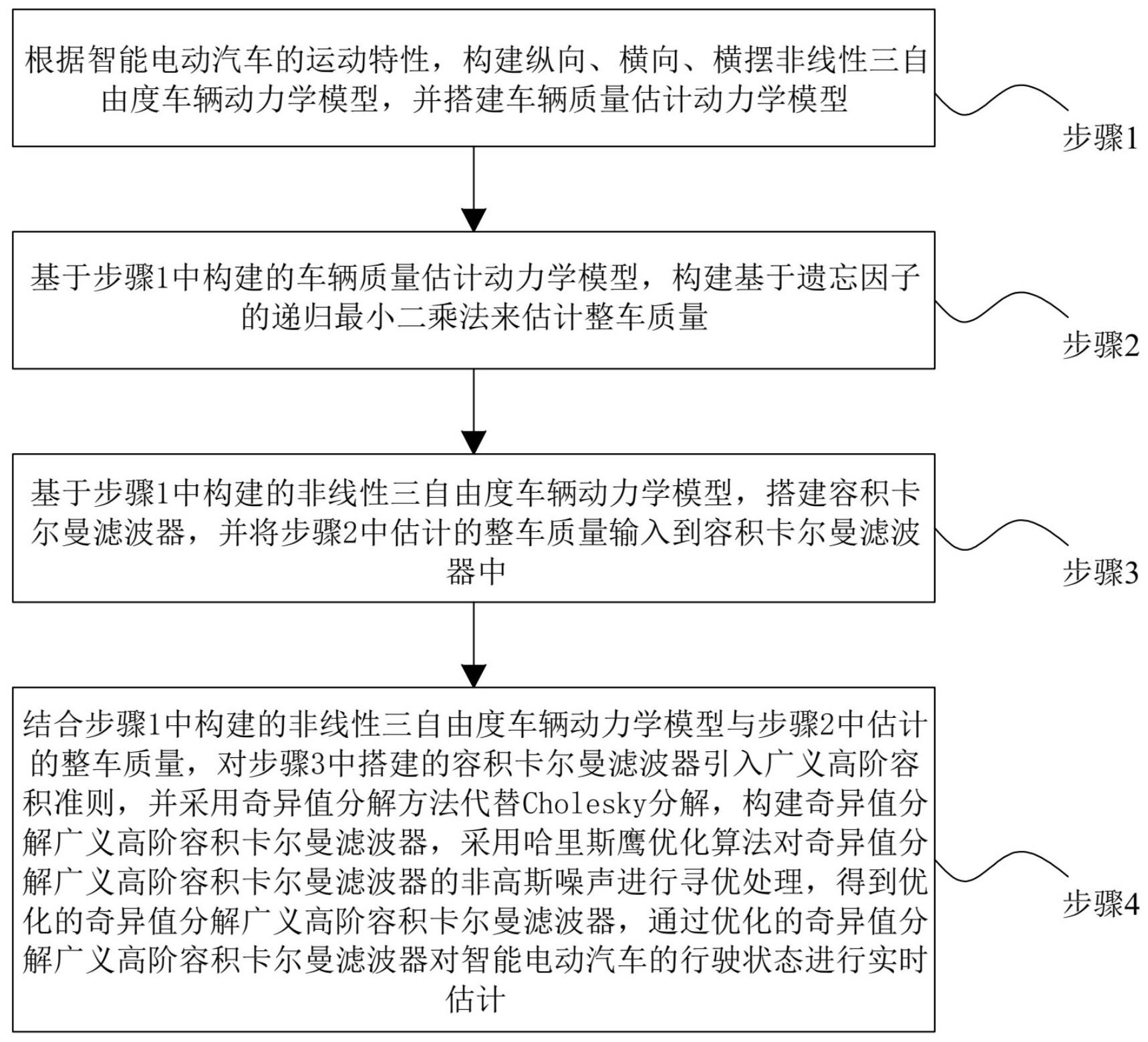
3、步骤1,根据智能电动汽车的运动特性,构建纵向、横向、横摆非线性三自由度车辆动力学模型,并搭建车辆质量估计动力学模型;
4、步骤2,基于步骤1中构建的车辆质量估计动力学模型,构建基于遗忘因子的递归最小二乘法来估计整车质量;
5、步骤3,基于步骤1中构建的非线性三自由度车辆动力学模型,搭建容积卡尔曼滤波器,并将步骤2中估计的整车质量输入到容积卡尔曼滤波器中;
6、步骤4,结合步骤1中构建的非线性三自由度车辆动力学模型与步骤2中估计的整车质量,对步骤3中搭建的容积卡尔曼滤波器引入广义高阶容积准则,并采用奇异值分解方法代替cholesky分解,构建奇异值分解广义高阶容积卡尔曼滤波器,采用哈里斯鹰优化算法对奇异值分解广义高阶容积卡尔曼滤波器的非高斯噪声进行寻优处理,得到优化的奇异值分解广义高阶容积卡尔曼滤波器,通过优化的奇异值分解广义高阶容积卡尔曼滤波器对智能电动汽车的行驶状态进行实时估计。
7、根据本发明提供的智能电动汽车行驶状态信息估计方法,具有以下有益效果:
8、1、本发明综合考虑电动汽车的纵向、横向、横摆运动,建立三自由度车辆动力学模型和车辆质量估计动力学模型,通过基于遗忘因子的递归最小二乘法对整车质量进行估计,并通过奇异值分解广义高阶容积卡尔曼滤波器,能够对智能电动汽车的行驶状态信息进行实时估计;
9、2、不同于一般的容积卡尔曼滤波算法,本发明采用奇异值分解广义高阶容积卡尔曼滤波器,对建立的汽车动力学系统模型状态进行实时估计,考虑多工况下行驶的电动汽车动力学模型是一个非线性的系统,传统的容积卡尔曼滤波算法只能处理三阶问题,估计精度不高,而本发明在容积卡尔曼滤波的基础上,采用广义高阶容积准则,能够将滤波器提升为五阶系统,且采用奇异值分解方法代替cholesky分解,消除了滤波器的不正定性问题,能够提高估计精度;
10、3、本发明采用哈里斯鹰优化算法对奇异值分解广义高阶容积卡尔曼滤波器的非高斯噪声进行寻优处理,增强了滤波器对非高斯恶劣计算环境的抵抗能力,增强滤波器的鲁棒性,且采用本发明的方法,可以选择一些低成本的传感器(如加速度计,方向盘转角传感器)作为滤波器的输入,大大降低了成本,同时估计过程基本不受车辆结构参数变化影响,具有较广的适用性和良好的鲁棒性。
技术特征:
1.一种智能电动汽车行驶状态信息估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤1中,构建的纵向、横向、横摆非线性三自由度车辆动力学模型的表达式如下:
3.根据权利要求2所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤1中,车辆质量估计动力学模型的表达式为:
4.根据权利要求3所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤2中,基于遗忘因子的递归最小二乘法的表达式为:
5.根据权利要求4所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤3中,基于步骤1中构建的非线性三自由度车辆动力学模型,搭建容积卡尔曼滤波器具体包括:
6.根据权利要求5所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤4中,构建奇异值分解广义高阶容积卡尔曼滤波器具体包括:
7.根据权利要求6所述的智能电动汽车行驶状态信息估计方法,其特征在于,步骤4中,采用哈里斯鹰优化算法对奇异值分解广义高阶容积卡尔曼滤波器的非高斯噪声进行寻优处理具体包括:
技术总结
本发明提供一种智能电动汽车行驶状态信息估计方法,该方法先构建纵向、横向、横摆非线性三自由度车辆动力学模型,并搭建车辆质量估计动力学模型,然后构建基于遗忘因子的递归最小二乘法来估计整车质量,再搭建容积卡尔曼滤波器,最后对搭建的容积卡尔曼滤波器引入广义高阶容积准则,并采用奇异值分解方法代替Cholesky分解,构建奇异值分解广义高阶容积卡尔曼滤波器,并采用哈里斯鹰优化算法对奇异值分解广义高阶容积卡尔曼滤波器进行优化,从而能够对智能电动汽车的行驶状态进行有效的实时估计。
技术研发人员:陈齐平,于炳浩,江志强,舒强,熊祖琪,傅王梁,朱祖伟,梁成成,艾田付
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!