巷道预测方法、装置、电子设备及计算机可读存储介质与流程
本发明涉及煤矿勘探和设计,尤其是涉及一种巷道预测方法、装置、电子设备及计算机可读存储介质。
背景技术:
1、煤矿图纸不仅是煤矿历史的见证和记录,也是做好煤矿安全生产及技术管理经常使用的重要资料,还是矿井开采、日常生产技术管理、指挥调度、井下抢险救援的重要依据。
2、现有煤矿图纸的绘制方式通常是使用测量仪器对井下进行勘探收集数据,进而绘图人员借助绘图软件进行矿图的绘制。虽然使用此种方式绘制的图纸非常精确,但是由于是人为绘图,可能为了违法开采进而故意在图纸上隐瞒部分巷道的存在。由于勘探一次并绘制图纸非常耗时间,所以矿图的更新周期较长,时效性非常低。
技术实现思路
1、本发明的目的在于提供一种巷道预测方法、装置、电子设备及计算机可读存储介质,以缩短矿图的更新周期,提升矿图的时效性。
2、第一方面,本发明实施例提供了一种巷道预测方法,包括:
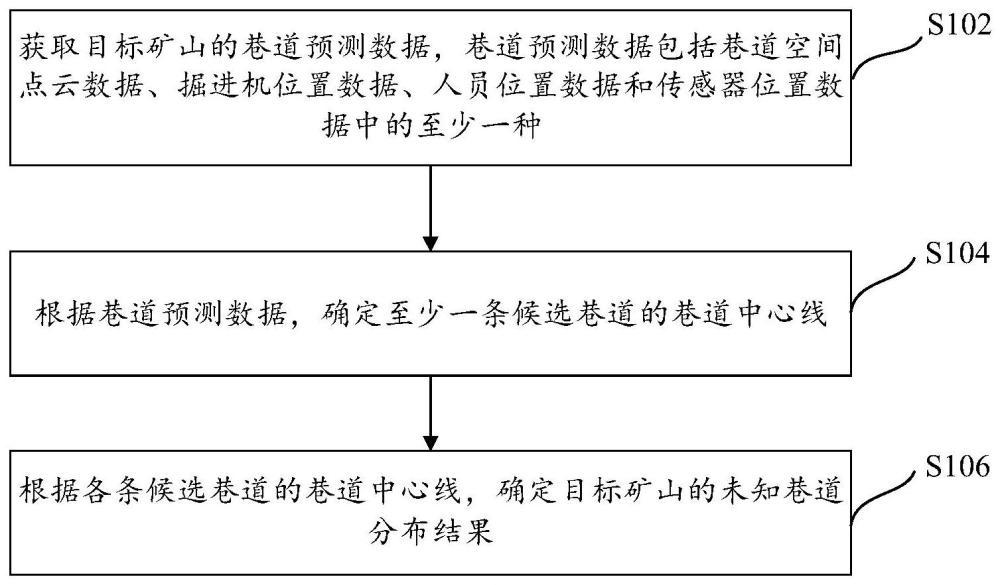
3、获取目标矿山的巷道预测数据,所述巷道预测数据包括巷道空间点云数据、掘进机位置数据、人员位置数据和传感器位置数据中的至少一种;
4、根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线;
5、根据各条所述候选巷道的巷道中心线,确定所述目标矿山的未知巷道分布结果。
6、进一步地,所述巷道预测数据包括巷道空间点云数据;所述根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线,包括:
7、对于每条所述候选巷道,根据当前候选巷道的巷道空间点云数据,确定所述当前候选巷道的巷道走向方向;
8、沿所述当前候选巷道的巷道走向方向,对所述当前候选巷道的巷道空间点云数据的所在空间进行空间划分,得到多个子空间;
9、根据每个所述子空间对应的点云数据,确定每个所述子空间的重心位置;
10、根据各个所述子空间的重心位置,确定所述当前候选巷道的巷道中心线。
11、进一步地,所述根据当前候选巷道的巷道空间点云数据,确定所述当前候选巷道的巷道走向方向,包括:
12、根据所述当前候选巷道的巷道空间点云数据,确定所述当前候选巷道在三个坐标轴方向上的长度;
13、将长度最长的坐标轴方向确定为所述当前候选巷道的巷道走向方向;
14、所述根据各个所述子空间的重心位置,确定所述当前候选巷道的巷道中心线,包括:
15、利用预设的第一直线拟合算法对各个所述子空间的重心位置进行直线拟合处理,得到所述当前候选巷道对应的三维直线;
16、将距离最远的两个所述子空间的重心位置映射到所述三维直线上,得到所述当前候选巷道的巷道中心线。
17、进一步地,所述巷道预测数据包括掘进机位置数据,所述掘进机位置数据包括至少一台掘进机中每台所述掘进机对应的多个原始位置坐标;所述根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线,包括:
18、对于每台所述掘进机,对当前掘进机对应的多个原始位置坐标进行坐标系转换,得到预设的目标坐标系下的多个目标位置坐标;
19、利用预设的第二直线拟合算法对各个所述目标位置坐标进行直线拟合处理,得到所述当前掘进机对应的当前候选巷道的巷道直线;
20、根据所述当前候选巷道的巷道直线和已知巷道的中心线,确定所述当前候选巷道的巷道中心线。
21、进一步地,所述掘进机位置数据还包括每台所述掘进机对应的巷道名称;所述利用预设的第二直线拟合算法对各个所述目标位置坐标进行直线拟合处理,得到所述当前掘进机对应的当前候选巷道的巷道直线之后,所述巷道预测方法还包括:
22、通过将各个所述目标位置坐标映射到所述当前候选巷道的巷道直线上,确定所述当前候选巷道的掘进进尺数;
23、对所述当前候选巷道和预设的掘进计划中的巷道进行巷道名称匹配,得到所述当前候选巷道对应的匹配巷道;
24、通过对所述当前候选巷道和相应的匹配巷道进行掘进进尺数比较,确定所述当前候选巷道的巷道验证结果;
25、所述根据所述当前候选巷道的巷道直线和已知巷道的中心线,确定所述当前候选巷道的巷道中心线,包括:
26、从所述已知巷道中选取与所述当前候选巷道的预设属性最接近的相近巷道;其中,所述预设属性包括倾角和/或距离;
27、将所述相近巷道的两个端点投影至所述当前候选巷道的巷道直线上,得到所述当前候选巷道的巷道中心线。
28、进一步地,所述巷道预测数据包括人员位置数据,所述人员位置数据包括多个人员中每个所述人员对应的区域标识和多个人员位置坐标;所述根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线,包括:
29、对所述人员位置数据中同一区域标识下的所有所述人员位置坐标进行聚类处理,得到每个所述区域标识对应的多个簇;
30、对于每个所述区域标识,将当前区域标识对应的各个簇的中心点划分为多个中心点集合;其中,每个所述中心点集合中的相邻中心点满足预设要求,所述预设要求包括预设的距离条件和/或角度条件;
31、从多个所述中心点集合中筛选出中心点数量达到预设数量阈值的目标中心点集合;
32、利用预设的第三直线拟合算法对所述目标中心点集合中的各个中心点进行直线拟合处理,得到所述目标中心点集合对应的候选巷道的巷道直线;
33、根据所述候选巷道的巷道直线和已知巷道的中心线,确定所述候选巷道的巷道中心线。
34、进一步地,所述根据所述候选巷道的巷道直线和已知巷道的中心线,确定所述候选巷道的巷道中心线,包括:
35、对所述候选巷道的巷道直线与所述已知巷道的中心线进行倾角和距离的一致性比较,得到第一比较结果;
36、当所述第一比较结果为一致时,将所述候选巷道标记为已知巷道;
37、当所述第一比较结果为不一致时,确定所述已知巷道中与所述候选巷道的预设属性最接近的相近巷道;
38、将所述相近巷道的两个端点投影至所述候选巷道的巷道直线上,得到所述候选巷道的巷道中心线。
39、进一步地,所述巷道预测数据包括传感器位置数据,所述传感器位置数据包括多个传感器中每个所述传感器对应的监测区标识和传感器位置坐标;所述根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线,包括:
40、从所述传感器位置数据中筛选出监测区标识属于预设标识集合的多个目标传感器对应的目标传感器位置坐标;
41、对所有所述目标传感器位置坐标进行聚类处理,得到多个簇;
42、根据每个所述簇中的所述目标传感器位置坐标和已知巷道的中心线,确定每个所述簇对应的候选巷道的巷道中心线。
43、进一步地,所述根据每个所述簇中的所述目标传感器位置坐标和已知巷道的中心线,确定每个所述簇对应的候选巷道的巷道中心线,包括:
44、当所述簇中的所述目标传感器位置坐标为孤立点时,确定所述孤立点与所述已知巷道的中心线之间的最短距离;当所述最短距离大于预设距离阈值时,确定所述簇对应的关联巷道;其中,所述关联巷道为巷道类型满足预设类型要求下的、与所述孤立点之间的距离最短的已知巷道;将所述关联巷道的中心线平移至所述孤立点得到的中心线,确定为所述簇对应的候选巷道的巷道中心线;
45、当所述簇中的所述目标传感器位置坐标不为孤立点时,利用预设的第四直线拟合算法对所述簇中的各个所述目标传感器位置坐标进行直线拟合处理,得到所述簇对应的候选巷道的巷道直线;根据所述候选巷道的巷道直线和所述已知巷道的中心线,确定所述候选巷道的巷道中心线。
46、进一步地,所述巷道预测数据包括巷道空间点云数据、掘进机位置数据、人员位置数据和传感器位置数据中的至少两种,每种所述巷道预测数据对应的预测结果均包括至少一条所述候选巷道的巷道中心线,所述根据各条所述候选巷道的巷道中心线,确定所述目标矿山的未知巷道分布结果,包括:
47、对各个所述预测结果进行两两之间的巷道中心线的一致性比较,得到第二比较结果;
48、根据所述第二比较结果和各个所述预测结果对应的优先级,确定所述目标矿山的未知巷道分布结果。
49、进一步地,所述根据所述第二比较结果和各个所述预测结果对应的优先级,确定所述目标矿山的未知巷道分布结果,包括:
50、当所述第二比较结果包括至少两个所述预测结果中存在一致的候选巷道时,确定所述至少两个所述预测结果中优先级最高的第一预测结果,并将所述第一预测结果中的相应候选巷道的巷道中心线确定为未知巷道的巷道中心线;
51、当所述第二比较结果包括第二预测结果中存在与其他所述预测结果均不一致的候选巷道时,将所述第二预测结果中的相应候选巷道的巷道中心线确定为未知巷道的巷道中心线;其中,所述第二预测结果为各个所述预测结果中优先级最高的预测结果;
52、将各个所述未知巷道的巷道中心线,确定为所述目标矿山的未知巷道分布结果。
53、第二方面,本发明实施例还提供了一种巷道预测装置,包括:
54、数据获取模块,用于获取目标矿山的巷道预测数据,所述巷道预测数据包括巷道空间点云数据、掘进机位置数据、人员位置数据和传感器位置数据中的至少一种;
55、第一确定模块,用于根据所述巷道预测数据,确定至少一条候选巷道的巷道中心线;
56、第二确定模块,用于根据各条所述候选巷道的巷道中心线,确定所述目标矿山的未知巷道分布结果。
57、第三方面,本发明实施例还提供了一种电子设备,包括存储器、处理器,所述存储器中存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的巷道预测方法。
58、第四方面,本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行第一方面所述的巷道预测方法。
59、本发明实施例提供的巷道预测方法、装置、电子设备及计算机可读存储介质,在进行巷道预测时,先获取目标矿山的巷道预测数据,巷道预测数据包括巷道空间点云数据、掘进机位置数据、人员位置数据和传感器位置数据中的至少一种;然后根据巷道预测数据,确定至少一条候选巷道的巷道中心线;进而根据各条候选巷道的巷道中心线,确定目标矿山的未知巷道分布结果。这样结合多元感知数据实现了未知巷道的自动预测,从而可以缩短矿图的更新周期,提升矿图的更新频率,进而提升了矿图的时效性。
- 还没有人留言评论。精彩留言会获得点赞!