一种基于激光摄像和自编码器的坠物检测方法与系统与流程
本发明涉及坠物检测,特别涉及一种基于激光摄像和自编码器的坠物检测方法与系统。
背景技术:
1、针对户外场景,随着城市建设不断向高层发展和人口密度的大幅提高,高空坠物引发的安全问题日益受到关注。为了有效预防和减少此类事故的发生,学者们开展了一系列关于高空坠物检测的研究。研究主要集中在基于计算机视觉和深度学习的物体识别方法上。这些方法通过分析普通图像或视频,识别出可能坠落的物体并进行预警。然而,现有研究在检测精度、实时性、黑夜、以及存在与背景相同颜色时方面仍存在严重不足。
2、当前的坠物检测算法,大部分基于传统机器学习的帧间差算法,优点是需要的算力小,不过对与背景相近的颜色的目标难以区分。同时由于其本身去噪算法的存在,导致无法检测微小目标。
3、即现有技术存在如下缺点:
4、(1)对大目标检测良好,对微小目标漏检高。
5、(2)无法难以识别与背景颜色相近的坠物,同时对无灯光情况难以辨识。
技术实现思路
1、本发明所要解决的技术问题是:提供一种基于激光摄像和自编码器的坠物检测方法与系统,提高坠物识别的精确度。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种基于激光摄像和自编码器的坠物检测方法,包括步骤:
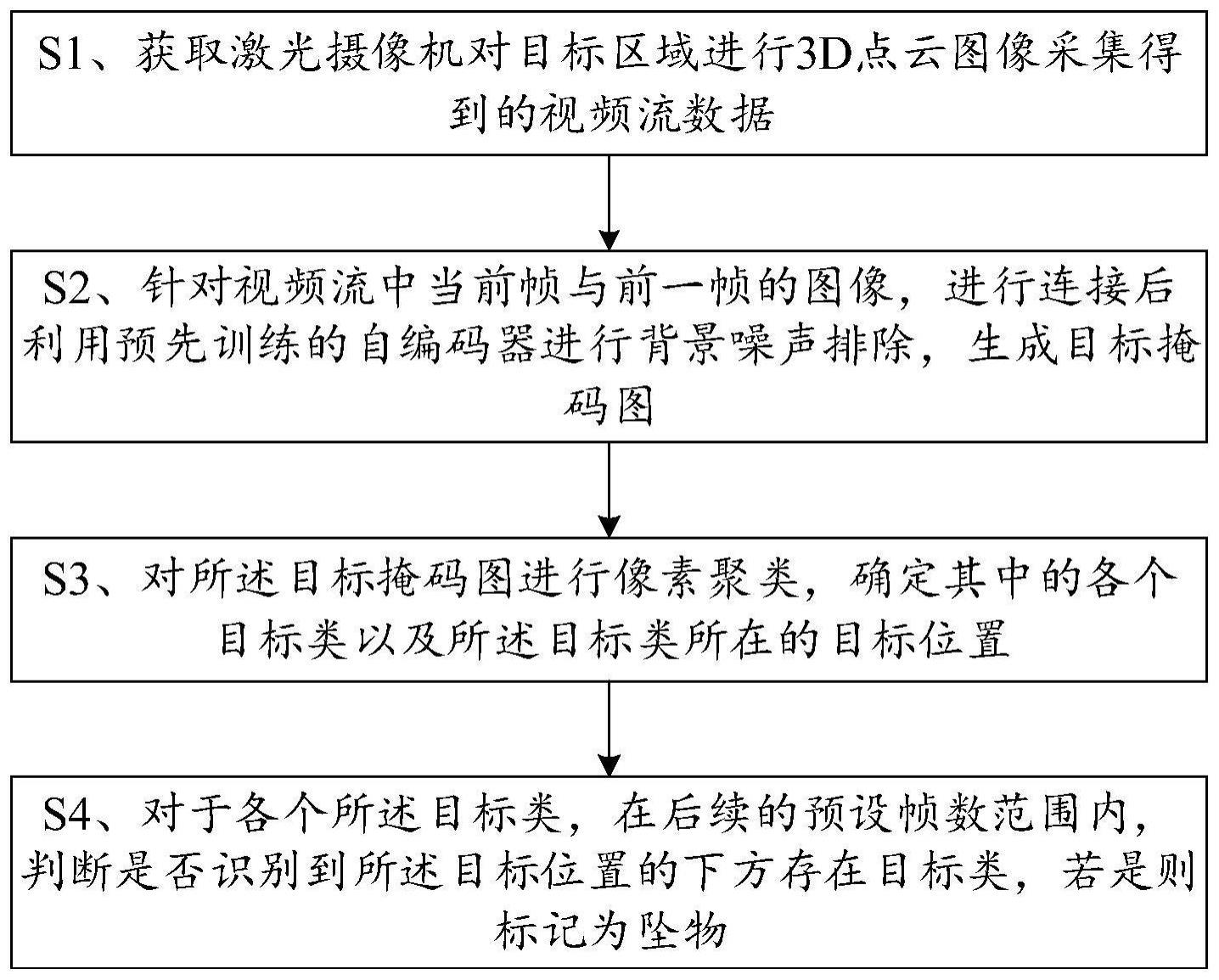
4、s1、获取激光摄像机对目标区域进行3d点云图像采集得到的视频流数据;
5、s2、针对视频流中当前帧与前一帧的图像,进行连接后利用预先训练的自编码器进行背景噪声排除,生成目标掩码图;
6、s3、对所述目标掩码图进行像素聚类,确定其中的各个目标类以及所述目标类所在的目标位置;
7、s4、对于各个所述目标类,在后续的预设帧数范围内,判断是否识别到所述目标位置的下方存在目标类,若是则标记为坠物。
8、为了解决上述技术问题,本发明采用的另一种技术方案为:
9、一种基于激光摄像和自编码器的坠物检测系统,包括激光摄像机和检测终端,所述检测终端包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
10、s1、获取激光摄像机对目标区域进行3d点云图像采集得到的视频流数据;
11、s2、针对视频流中当前帧与前一帧的图像,进行连接后利用预先训练的自编码器进行背景噪声排除,生成目标掩码图;
12、s3、对所述目标掩码图进行像素聚类,确定其中的各个目标类以及所述目标类所在的目标位置;
13、s4、对于各个所述目标类,在后续的预设帧数范围内,判断是否识别到所述目标位置的下方存在目标类,若是则标记为坠物。
14、本发明的有益效果在于:本发明的一种基于激光摄像和自编码器的坠物检测方法与系统,利用激光摄像机进行3d点云图像采集,能够克服不同颜色与色彩与周边环境相似的影响,同时采用预训练的自编码器进行噪声去除后,解决现有噪声去除算法导致微小目标漏检率高的问题,利用像素聚类和帧间位置变化,来快速识别坠物,能够有效提高坠物识别的精确度和效率。
技术特征:
1.一种基于激光摄像和自编码器的坠物检测方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种基于激光摄像和自编码器的坠物检测方法,其特征在于,步骤s2包括步骤:
3.根据权利要求1或2所述的一种基于激光摄像和自编码器的坠物检测方法,其特征在于,所述自编码器采用深度学习网络,包括一个编码器和一个解码器;
4.根据权利要求1所述的一种基于激光摄像和自编码器的坠物检测方法,其特征在于,步骤s3包括步骤:
5.根据权利要求4所述的一种基于激光摄像和自编码器的坠物检测方法,其特征在于,预设的聚类算法具体为dbscan聚类算法。
6.一种基于激光摄像和自编码器的坠物检测系统,其特征在于,包括激光摄像机和检测终端,所述检测终端包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
7.根据权利要求6所述的一种基于激光摄像和自编码器的坠物检测系统,其特征在于,步骤s2包括步骤:
8.根据权利要求6或7所述的一种基于激光摄像和自编码器的坠物检测系统,其特征在于,所述自编码器采用深度学习网络,包括一个编码器和一个解码器;
9.根据权利要求6所述的一种基于激光摄像和自编码器的坠物检测系统,其特征在于,步骤s3包括步骤:
10.根据权利要求9所述的一种基于激光摄像和自编码器的坠物检测系统,其特征在于,预设的聚类算法具体为dbscan聚类算法。
技术总结
本发明公开了一种基于激光摄像和自编码器的坠物检测方法,获取激光摄像机对目标区域进行3D点云图像采集得到的视频流数据;针对视频流中当前帧与前一帧的图像,进行连接后利用预先训练的自编码器进行背景噪声排除,生成目标掩码图;对所述目标掩码图进行像素聚类,确定其中的各个目标类以及所述目标类所在的目标位置;对于各个所述目标类,在后续的预设帧数范围内,判断是否识别到所述目标位置的下方存在目标类,若是则标记为坠物;本发明利用激光摄像机进行3D点云图像采集,能够克服不同颜色与色彩与周边环境相似的影响,同时采用自编码器进行噪声去除,解决现有噪声去除算法导致微小目标漏检率高的问题,能够有效提高坠物识别的精确度和效率。
技术研发人员:谢军伟,方靖雲,高钦泉,童同,邓炜,赖天歌,罗鸣
受保护的技术使用者:福建帝视科技集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!