一种搅拌船称重系统优化算法的制作方法
本发明涉及混凝土生产,具体地指一种搅拌船称重系统优化算法。
背景技术:
1、随着我国基础设施建设的发展,船载式混凝土搅拌站得到了广泛的应用。对于船载式混凝土搅拌站来说,配料计量是其精度要求最高的核心功能,但其在海浪的激励下会产生升沉、横摇、纵摇、横荡、纵荡的复合运动,从而导致称重系统产生偏差。
2、对于不同物料的称重,称重过程主要分为静态称重和动态称重。在早期的称重系统中,针对静态称重时多采用一些基础的数据处理方法,如均值滤波、中位值滤波;但对于船载式混凝土搅拌站而言,船舶在江河海洋中由于波浪的激励会产生晃动,在波浪激励的作用下时,会使称重传感器检测到由于波浪激励而产生的升沉加速度、横荡加速度、纵荡加速度、横摇角加速度和纵摇角加速度,即被称物与称重传感器之间会发生相对运动,进而导致称重传感器检测到的被称物的重量会实时发生变化。在上述过程中,称重传感器的称重精度无法满足混凝土生产相关规范的要求。本发明给出了一种基于融合卡尔曼变分模态分解及奇异谱分析的称重系统优化算法,该算法能够有效消除由于周期性波浪激励所造成的周期性误差,从而提高称重精度,保证混凝土配料计量精度。
3、在中国专利文献cn116160551a中记载了一种消除波浪激励误差的混凝土搅拌船计量方法,实验结果证实本发明中的方法相对该对比文献中的方法效果上有明显提升,误差更小。
技术实现思路
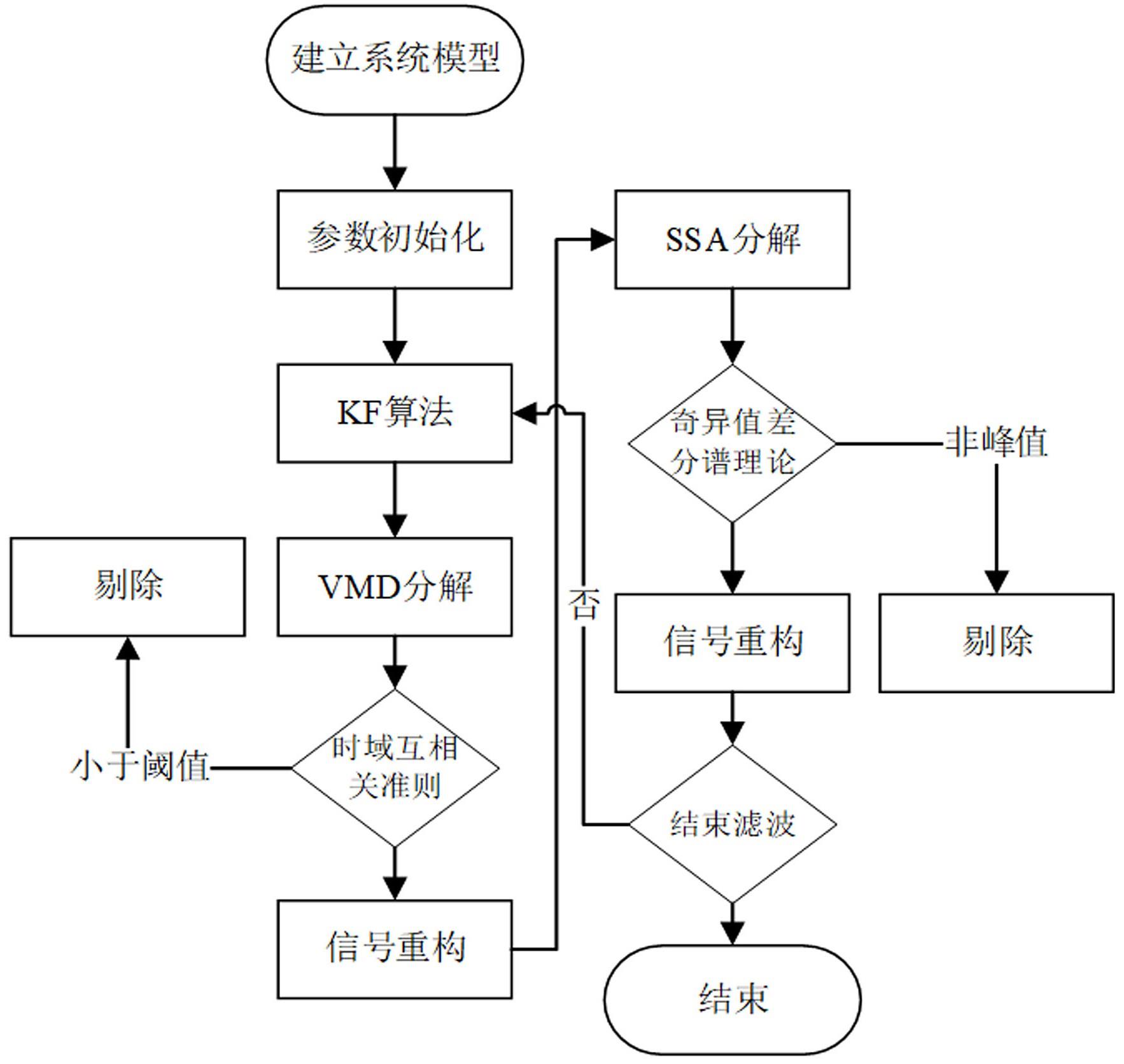
1、本发明的目的是解决上述背景技术中,混凝土搅拌船在波浪激励下计量系统失准的问题,提出了一种搅拌船称重系统优化算法。包括以下步骤:
2、s1、建立称重系统模型;
3、s2、对参数进行初始化;
4、s3、通过卡尔曼滤波对含噪信号进行预处理,消除系统中的随机误差;
5、s4、通过变分模态分解对信号进行分解,计算各分量的皮尔逊相关系数,并根据相关系数阈值对各分量进行筛选重构;
6、s5、对采用变分模态分解后的重构信号进一步进行奇异谱分析,利用奇异值差分谱理论,进一步去除系统中低频周期性噪声。
7、优选的方案中,步骤s1中的称重系统的状态方程为:
8、x(t)=ax(t-1)+r (1)
9、z(t)=cx(t)+w (2)
10、式中,x(t),x(t-1)分别为t时刻和t-1时刻的状态量,z(t)为t时刻的观测量,r为过程噪声向量,w为观测噪声向量,r和w都是高斯白噪声,且满足r~(0,q),w~(0,e),其中q为过程噪声向量r的协方差矩阵,e为观测噪声向量w的协方差矩阵。
11、优选的方案中,步骤s2中所述的参数包括:卡尔曼滤波中x(0)、p(0)、q(0)、e(0)、变分模态分解中的分解层数和惩罚因子和奇异谱分析中的窗口宽度。
12、优选的方案中,步骤s3中传统的卡尔曼滤波过程可分为预测阶段和更新阶段。
13、优选的方案中,步骤s3中传统的卡尔曼滤波过程的预测阶段的实现过程为:
14、状态预测:
15、x(t|t-1)=ax(t-1) (3)
16、误差协方差预测:
17、p(t|t-1)=ap(t-1)at+q (4)
18、更新阶段的实现过程为:
19、卡尔曼增益更新:
20、
21、误差协方差更新:
22、p(t)=(i-k(t)c)p(t|t-1) (6)
23、状态更新:
24、x(t)=x(t|t-1)+k(t)(z(t)-cx(t|t-1)) (7)
25、在式(4)至式(8)中,x(t)是t时刻的状态值,z(t)是t时刻的观测值,x(t|t-1)是根据t-1时刻计算出的t时刻的状态估计值,p(t)是t时刻的误差协方差矩阵,p(t|t-1)是根据t-1时刻计算出的t时刻的误差协方差矩阵估计值,k(t)是t时刻的卡尔曼增益。
26、优选的方案中,步骤s4中还包括以下步骤:
27、通过变分模态分解将卡尔曼滤波处理后的信号分解为多个本征模态函数:
28、uk(t)=ak(t)cos(φ(t)) (8)
29、式中,ak(t)表示t时刻的幅值,φ(t)表示t时刻的频率;
30、对uk(t)进行hilbert变换得到单边谱:
31、
32、式中,δ(t)为冲击函数,*表示卷积。
33、优选的方案中,步骤s4中还包括以下步骤:将式(8)中每个本征模态函数的频谱调制到响应的基频带上:
34、
35、此时变分模态分解可表示为带约束的最优化问题:
36、
37、式中,{uk}={u1,u2,..,uk},为分解得到的本征模态函数分量,{ωk}={ω1,ω2,..,ωk}为各本征模态函数的中心频率,f为输入信号;
38、引入惩罚因子α和拉格朗日系数λ对式(11)求解,构建的拉格朗日函数为:
39、
40、对式(12)求解即可得到k个本征模态函数:
41、
42、
43、优选的方案中,步骤s5中还包括以下步骤:通过奇异谱分析将非平稳或平稳信号进行分解和重构,以实现特征信号与噪声的分离,由变分模态分解处理后重构的信号为{xi,i=1,2,..,n},可以构造hankel矩阵:
44、
45、式中,k=n-l+1,l为窗口长度;
46、定义w=hht,对w进行奇异值分解得到特征值λi以及其对应的特征向量ui,则h可表示为:
47、
48、式中,r是h的秩,
49、将hi进行分解为p个不相交的子集,则式(16)可表示为:
50、
51、z是(l×k)的矩阵,其元素为zij,其中l*=min(l,k),k*=max(l,k),当l<k时,令反之对z进行对角平均化可得:
52、
53、对于式(17)中每个矩阵hiq,由式(18)可以生成一个重构的时间序列则初始信号{xi,i=1,2,..,n}分解总和为p的重构后的序列为:
54、
55、优选的方案中,步骤s4中所述的各分量的皮尔逊相关系数的计算公式为:
56、
57、式中,x是经卡尔曼滤波处理后称重信号,y是变分模态分解分解后的各分量,是信号x,y的均值,n为信号长度。
58、本发明的有益效果为:本发明通过一种基于融合卡尔曼变分模态分解及奇异谱分析的称重系统优化算法对称重传感器输出信号中所包含的真实信号、随机误差和波浪激励误差进行处理,能够有效消除由于周期性波浪激励所造成的周期性误差和传感器本身所产生的随机误差,充分提高了混凝土搅拌船计量系统的计量精度。
- 还没有人留言评论。精彩留言会获得点赞!