一种基于值守作业机器人的航空插头位姿定位方法及系统与流程
本发明属于电力以及机器人,尤其涉及一种基于值守作业机器人的航空插头位姿定位方法及系统。
背景技术:
1、随着智能运维技术的发展,应用机器人对电气设备开展智能化运维操作是智能电网发展的重要研究内容。航空插头具有较高的电气联接可靠性被广泛应用在如中置柜等电气设备中。航空插头高精度原位定位是应用值守作业机器人对航空插头进行插拔等运维操作的基础。
2、发明人发现,在配电站中航空插头广泛使用的背景下,值守作业机器人能否实现对航空插头的精确定位,将直接影响航空插头插拔操作的成功率;而由于航空插头边缘特征光滑,基于传统的点云数据三维重构的传统方法难以对航空插头的三维位姿进行准确判定,降低了航空插头插拔操作的成功率。
技术实现思路
1、本发明为了解决上述问题,提出了一种基于值守作业机器人的航空插头位姿定位方法及系统,本发明利用航空插头孔洞与表面颜色信息的不同,提取位姿较为固定的孔洞部分点云,并利用点云配准的方式得到了航空插头的精确位姿,提高了航空插头插拔操作的成功率,解决了因航空插头边缘特征光滑等原因难以进行准确判定位姿的问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
3、第一方面,本发明提供了一种基于值守作业机器人的航空插头位姿定位方法,包括:
4、获取作业区域内激光点云信息和航空插头rgb图像信息;
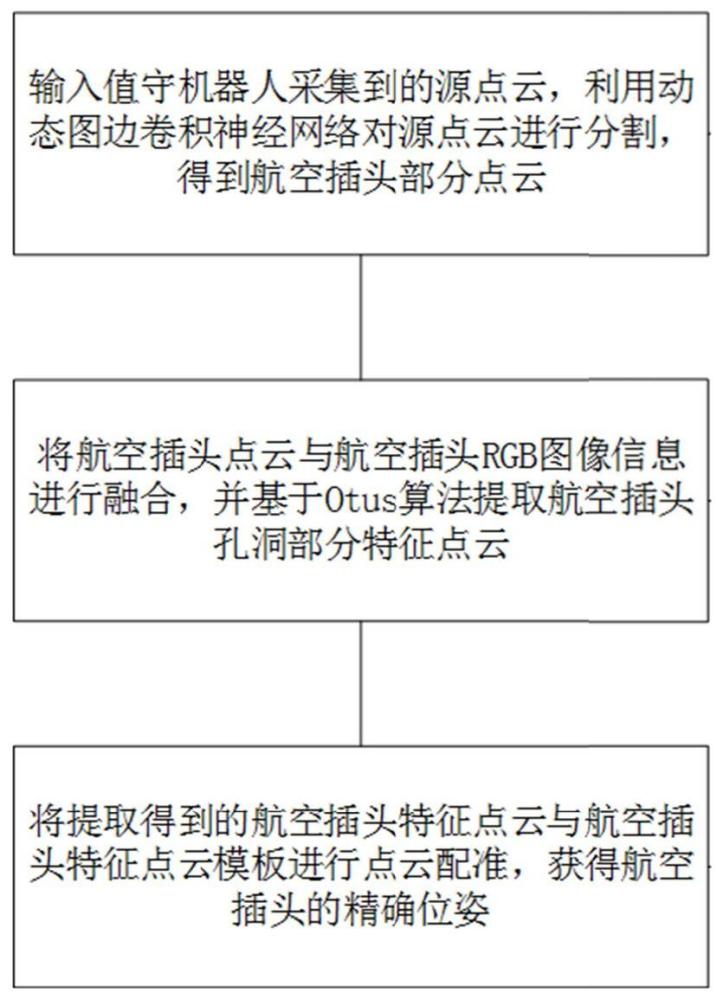
5、对获取的作业区域内激光点云信息进行分割,得到航空插头点云信息;
6、将得到的航空插头点云信息与航空插头rgb图像信息进行融合,并提取航空插头孔洞特征点云;
7、将提取航空插头孔洞特征点云与预设的航空插头特征点云模板进行配准,得到航空插头的位姿。
8、进一步的,利用训练后的动态图边卷积网络对获取的作业区域内激光点云信息进行分割。
9、进一步的,标定用于获取航空插头rgb图像信息的图像获取设备内参,以及激光点云获取设备坐标系与图像获取设备坐标系之间转换矩阵,得到激光点云获取设备与图像获取设备坐标转换关系,以及图像获取设备内参矩阵;计算激光点云获取设备坐标系下航空插头点云在图像坐标系下的像素值;融合位置信息、相应的像素坐标以及在图像中像素位置对应的rgb信息,得到融合向量;对得到的融合向量进行特征提取。
10、进一步的,将rgb颜色分量转为灰度值;通过遍历的方式计算,得到使得类间方差最大的阈值,作为最佳分割阈值;按照最佳分割阈值对点云进行分割,将灰度值小于最佳分割阈值的归类为航空插头孔洞特征点云。
11、进一步的,利用相机获取航空插头rgb图像信息,利用雷达获取作业区域内激光点云信息。
12、进一步的,计算航空插头孔洞特征点云的质心;对航空插头特征点云模板进行平移变换,使得航空插头孔洞特征点云的质心与航空插头特征点云模板的质心重合;进行配准得到位姿变换矩阵。
13、进一步的,利用迭代最近点配准算法得到位姿变换矩阵;在待匹配的点云与源点云中找到距离最近的点对,计算位姿变换,使得误差函数最小,具体的,对待匹配的点云与源点云进行位姿变换,并计算变换后的两个点云点集之间的平均距离,若平均距离满足预设距离或者迭代次数大于最大迭代次数则跳出迭代,否则重新进入迭代。
14、第二方面,本发明还提供了一种基于值守作业机器人的航空插头位姿定位系统,包括:
15、数据采集模块,被配置为:获取作业区域内激光点云信息和航空插头rgb图像信息;
16、分割模块,被配置为:对获取的作业区域内激光点云信息进行分割,得到航空插头点云信息;
17、特征提取模块,被配置为:将得到的航空插头点云信息与航空插头rgb图像信息进行融合,并提取航空插头孔洞特征点云;
18、位姿确定块,被配置为:将提取航空插头孔洞特征点云与预设的航空插头特征点云模板进行配准,得到航空插头的位姿。
19、第三方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现了第一方面所述的基于值守作业机器人的航空插头位姿定位方法的步骤。
20、第四方面,本发明还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现了第一方面所述的基于值守作业机器人的航空插头位姿定位方法的步骤。
21、与现有技术相比,本发明的有益效果为:
22、本发明中首先获取作业区域内激光点云信息和航空插头rgb图像信息;然后,对获取的作业区域内激光点云信息进行分割,得到航空插头点云信息;将得到的航空插头点云信息与航空插头rgb图像信息进行融合,并提取航空插头孔洞特征点云;最后,将提取航空插头孔洞特征点云与预设的航空插头特征点云模板进行配准,得到航空插头的位姿;利用航空插头孔洞与表面颜色信息的不同,提取位姿较为固定的孔洞部分点云,并利用点云配准的方式得到了航空插头的精确位姿,提高了航空插头插拔操作的成功率,解决了因航空插头边缘特征光滑等原因难以进行准确判定位姿的问题。
技术特征:
1.一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,包括:
2.如权利要求1所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,利用训练后的动态图边卷积网络对获取的作业区域内激光点云信息进行分割。
3.如权利要求1所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,标定用于获取航空插头rgb图像信息的图像获取设备内参,以及激光点云获取设备坐标系与图像获取设备坐标系之间转换矩阵,得到激光点云获取设备与图像获取设备坐标转换关系,以及图像获取设备内参矩阵;计算激光点云获取设备坐标系下航空插头点云在图像坐标系下的像素值;融合位置信息、相应的像素坐标以及在图像中像素位置对应的rgb信息,得到融合向量;对得到的融合向量进行特征提取。
4.如权利要求3所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,将rgb颜色分量转为灰度值;通过遍历的方式计算,得到使得类间方差最大的阈值,作为最佳分割阈值;按照最佳分割阈值对点云进行分割,将灰度值小于最佳分割阈值的归类为航空插头孔洞特征点云。
5.如权利要求3所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,利用相机获取航空插头rgb图像信息,利用雷达获取作业区域内激光点云信息。
6.如权利要求1所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,计算航空插头孔洞特征点云的质心;对航空插头特征点云模板进行平移变换,使得航空插头孔洞特征点云的质心与航空插头特征点云模板的质心重合;进行配准得到位姿变换矩阵。
7.如权利要求6所述的一种基于值守作业机器人的航空插头位姿定位方法,其特征在于,利用迭代最近点配准算法得到位姿变换矩阵;在待匹配的点云与源点云中找到距离最近的点对,计算位姿变换,使得误差函数最小,具体的,对待匹配的点云与源点云进行位姿变换,并计算变换后的两个点云点集之间的平均距离,若平均距离满足预设距离或者迭代次数大于最大迭代次数则跳出迭代,否则重新进入迭代。
8.一种基于值守作业机器人的航空插头位姿定位系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现了如权利要求1-7任一项所述的基于值守作业机器人的航空插头位姿定位方法的步骤。
10.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现了如权利要求1-7任一项所述的基于值守作业机器人的航空插头位姿定位方法的步骤。
技术总结
本发明属于电力以及机器人技术领域,提供了一种基于值守作业机器人的航空插头位姿定位方法及系统,首先获取作业区域内激光点云信息和航空插头RGB图像信息;然后,对获取的作业区域内激光点云信息进行分割,得到航空插头点云信息;将得到的航空插头点云信息与航空插头RGB图像信息进行融合,并提取航空插头孔洞特征点云;最后,将提取航空插头孔洞特征点云与预设的航空插头特征点云模板进行配准,得到航空插头的位姿;利用航空插头孔洞与表面颜色信息的不同,提取位姿较为固定的孔洞部分点云,并利用点云配准的方式得到了航空插头的精确位姿,解决了因航空插头边缘特征光滑等原因难以进行准确判定位姿的问题。
技术研发人员:瞿佳洁,徐春峰,王洁,吴顺超,余锦浩,张彦欢,冯保林,张宁,程煌坤
受保护的技术使用者:国网上海市电力公司奉贤供电公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!