基于对数变换和伽马校正加权光照补偿的夜间车道线识别方法
本发明涉及智能网联汽车车道线识别领域,特别是一种基于对数变换和伽马校正加权光照补偿的夜间车道线识别方法。
背景技术:
1、随着汽车工业进入4.0时代,汽车的智能化也越来越受到人们的关注。鉴于车道线识别对于自动驾驶汽车的重要性,国内外很多学者对于车道线识别进行了大量的研究,但大多是在正常光照条件下进行的。
2、在正常光照条件下车辆采集的道路图像清晰度高,车道线与背景路面对比度较为明显,可采用基于光流估计与背景建模的方法对图像进行处理,但是如果在夜间光照不良,车道线与背景对比度较小以及图像整体亮度较低的情况下,采用正常光照条件下的车道线识别方法来对图像进行处理,结果则不能满足夜间车道线识别的需要。
技术实现思路
1、本发明需要解决的技术问题是:针对夜间光照不良,车道线与背景对比度较小以及图像整体亮度较低的情况下,采用正常光照条件下的车道线识别方法来对图像进行处理,结果不能满足需要的情况,提供一种基于光照补偿的夜间车道线识别方法,以便能满足夜间车道线识别的需要。
2、本发明是通过以下技术方案来实现的:
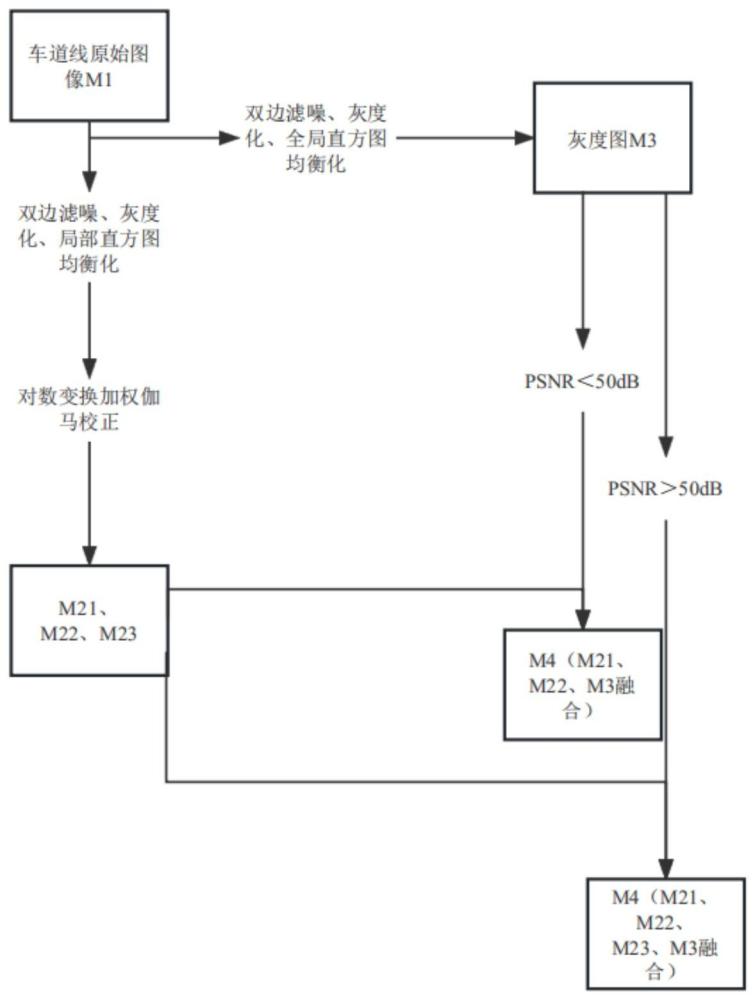
3、本发明提供的基于对数变换和伽马校正加权光照补偿的夜间车道线识别方法,其为:首先对采集到的车道线原始图像m1进行双边滤波去噪,然后采用一种基于车道线颜色特征的gamma校正灰度化处理方法对车道线图像进行灰度化处理,其次对灰度图像进行局部直方图均衡化,再采用一种基于对数变换加权伽马校正的采用不同对数变换底数和伽马校正权值的方法对均衡化后的图像进行处理得到m21、m22、m23;此外对原始图像m1进行同之前的去噪、灰度化处理方法处理,再使用全局直方图均衡化得到灰度图m3;根据m3的峰值信噪比将m3同m21/m22/m23中的一个或几个进行非线性叠加得到光照补偿后的灰度图m4,最终达到对图像进行光照补偿的目的,最后对图像进行canny边缘检测以及霍夫变换识别车道线,并对识别出来的车道线进行拟合。
4、上述方法中:所述车道线图像是由车载相机获得的rgb图像;采用双边滤波算法对获取到的车道线图像m1进行双边滤波去噪。
5、上述方法中:采用改进的伽马校正灰度化方法对获取到的车道线图像m1进行灰度化处理,具体为:根据车道线颜色在rgb空间中的特点,结合人眼对颜色的敏感程度进行权重分配,其中保留r、g通道,将b通道的数值置0,能够更好地突出车道线信息。
6、本发明可以采用局部直方图均衡化算法对灰度化处理后的图像进行局部直方图均衡化。
7、上述方法中:所述基于对数变换加权伽马校正的方法包括以下步骤:对数变换方法组合伽马校正方法,二者以加权的方式使用,对灰度图像进行光照补偿;基于局部直方图均衡化前后直方图均方差的对数变换和伽马校正的权值选定方法,权值的选择和直方图均衡化前后的直方图均方差有关,均衡化后直方图的均方差值比上均衡化前的直方图均方差值,记为α,就是对数变换的权值,(1-α)记为伽马校正的权值,能较好地突出图像低灰度部分特征。
8、上述方法中:所述加权的方式是基于局部直方图均衡化前后直方图均方差的对数变换和伽马校正的权值选定方法,权值的选择和直方图均衡化前后的直方图均方差有关,均衡化后直方图的均方差值比上均衡化前的直方图均方差值,记为α,就是对数变换的权值,(1-α)记为伽马校正的权值。
9、上述方法中:所述全局直方图均衡化是一种图像增强的技术,用于改善图像的对比度和亮度分布;该技术通过对图像的像素值进行变换,使得图像的直方图分布更加均匀;
10、具体步骤包括:
11、将彩色图像转换为灰度图像,以便处理单通道的像素值;
12、计算灰度图像的直方图,获取每个灰度级别的像素数;
13、计算累积分布函数(cdf),将每个灰度级别的像素数除以总像素数得到累积概率;
14、根据累积概率和灰度级别的最大值来计算新的灰度级别,并将其映射回原始图像;
15、对原始图像应用新的灰度级别;通过全局直方图均衡化,可以使得图像中的细节更加清晰。
16、上述方法中,对m3和m21/m22/m23图像进行非线性叠加的方法是:先相乘再开方,
17、
18、
19、上述方法中:所述canny边缘检测算法的主要是通过以下步骤来检测图像中的边缘:
20、计算梯度:对平滑后的图像使用sobel、prewitt等算子计算每个像素点的梯度幅值和方向。这有助于确定图像中的潜在边缘;
21、非极大值抑制:在梯度图上,对每个像素点进行检查,保留梯度方向上的局部最大值,以细化边缘;
22、双阈值处理:将图像中的像素分为强边缘、弱边缘和非边缘三类,通过设置两个阈值来划分。强边缘像素被认为是确定的边缘,而弱边缘像素可能是噪声或弱边缘;通常情况下,如果弱边缘像素与强边缘像素相邻,则将其归类为边缘,非边缘像素则被排除;
23、边缘连接:通过跟踪弱边缘像素,将其连接到强边缘像素,从而形成连续的边缘;所述霍夫变换的基本思想是将图像中的点映射到参数空间(参数空间通常是与图像中的形状相关的参数),从而在参数空间中找到几何形状对应的明显峰值。
24、上述方法中:可以采用霍夫变换方法对识别出来的车道线进行拟合。
25、本发明与现有技术相比具有以下的主要的优点:
26、1.提供了一种基于车道线颜色特征的gamma校正灰度化处理方法。根据车道线颜色在rgb空间中的特点,结合人眼对颜色的敏感程度进行权重分配,能够更好地突出车道线信息。
27、2.提出了一种基于对数变换和伽马校正加权的方法对图像进行光照补偿。基于局部直方图均衡化前后直方图均方差的对数变换和伽马校正的权值选定方法,权值的选择和直方图均衡化前后的直方图均方差有关,来对图像进行调节,能较好地突出图像低灰度部分特征。
28、3.将传统直方图均衡化算法是一个经典的图像增强算法,但是增强之后的图像存在着细节丢失和噪声较大的不足,而对数变换和伽马校正可以有效地均衡图像的亮度,不足之处是对于对比度的处理不足,细节不明显,本发明将直方图均衡和非线性变换的优势于一体。
技术特征:
1.一种基于对数变换和伽马校正加权光照补偿的夜间车道线识别方法,其特征在于,首先对采集到的车道线原始图像m1进行双边滤波去噪,然后采用一种基于车道线颜色特征的gamma校正灰度化处理方法对车道线图像进行灰度化处理,其次对灰度图像进行局部直方图均衡化,再采用一种基于对数变换加权伽马校正的采用不同对数变换底数和伽马校正权值的方法对均衡化后的图像进行处理得到m21、m22、m23;此外,对原始图像m1进行同之前的去噪、灰度化处理方法处理,再使用全局直方图均衡化得到灰度图m3;根据m3的峰值信噪比将m3同m21/m22/m23中的一个或几个进行非线性叠加得到光照补偿后的灰度图m4,最终达到对图像进行光照补偿的目的,最后对图像进行canny边缘检测以及霍夫变换识别车道线,并对识别出来的车道线进行拟合。
2.根据权利要求1所述的夜间车道线识别方法,其特征在于,所述车道线图像是由车载相机获得的rgb图像;采用双边滤波算法对获取到的车道线图像m1进行双边滤波去噪。
3.根据权利要求2所述的夜间车道线识别方法,其特征在于,采用改进的伽马校正灰度化方法对获取到的车道线图像m1进行灰度化处理,具体为:根据车道线颜色在rgb空间中的特点,结合人眼对颜色的敏感程度进行权重分配,其中保留r、g通道,将b通道的数值置0,能够更好地突出车道线信息。
4.根据权利要求3所述的夜间车道线识别方法,其特征在于,采用局部直方图均衡化算法对灰度化处理后的图像进行局部直方图均衡化。
5.根据权利要求1所述的夜间车道线识别方法,其特征在于,所述基于对数变换加权伽马校正的方法包括以下步骤:对数变换方法组合伽马校正方法,二者以加权的方式使用,对灰度图像进行光照补偿;基于局部直方图均衡化前后直方图均方差的对数变换和伽马校正的权值选定方法,权值的选择和直方图均衡化前后的直方图均方差有关,均衡化后直方图的均方差值比上均衡化前的直方图均方差值,记为α,就是对数变换的权值,(1-α)记为伽马校正的权值,能较好地突出图像低灰度部分特征。
6.根据权利要求5所述的夜间车道线识别方法,其特征在于,所述加权的方式是基于局部直方图均衡化前后直方图均方差的对数变换和伽马校正的权值选定方法,权值的选择和直方图均衡化前后的直方图均方差有关,均衡化后直方图的均方差值比上均衡化前的直方图均方差值,记为α,就是对数变换的权值,(1-α)记为伽马校正的权值。
7.根据权利要求1所述的夜间车道线识别方法,其特征在于,所述全局直方图均衡化是一种图像增强的技术,用于改善图像的对比度和亮度分布;该技术通过对图像的像素值进行变换,使得图像的直方图分布更加均匀;
8.根据权利要求1所述的夜间车道线识别方法,其特征在于,对m3和m21/m22/m23图像进行非线性叠加的方法是:先相乘再开方,
9.根据权利要求1所述的夜间车道线识别方法,其特征在于,所述canny边缘检测算法的主要是通过以下步骤来检测图像中的边缘:
10.根据权利要求9所述的夜间车道线识别方法,其特征在于,采用霍夫变换方法对识别出来的车道线进行拟合。
技术总结
本发明公开了一种基于对数变换和伽马校正加权光照补偿的夜间车道线识别方法,即:先对采集到的车道线原始图像M1进行双边滤波去噪,然后采用一种基于车道线颜色特征的gamma校正灰度化处理方法对车道线图像进行灰度化处理,并对灰度图像进行局部直方图均衡化,再采用不同对数变换底数和伽马校正权值的方法对均衡化后的图像进行处理得到M21、M22、M23;此外,对原始图像M1进行同之前的去噪、灰度化处理方法处理,再使用全局直方图均衡化得到灰度图M3;根据M3的峰值信噪比将M3同M21/M22/M23中的一个或几个进行非线性叠加得到光照补偿后的灰度图M4,最后对图像进行canny边缘检测以及霍夫变换识别车道线,并对识别出来的车道线进行拟合。本发明可以突出车道线信息。
技术研发人员:张洪昌,宋建伟
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!