一种基于远探测数据的三维重建方法及系统与流程
本发明一般地涉及三维重建。更具体地,本发明涉及一种基于远探测数据的三维重建方法及系统。
背景技术:
1、随着信息化时代的到来,数字城市建设需求日益迫切。人们不仅希望能够获得丰富的三维实景地图信息,为生活和出行提供便利,还希望建立整个城市的三维景观模型,用于城市规划,交通管理、灾害应急、环境保护等工作。建筑物作为构建城市景观环境的基本要素,其自动化建模一直是近二十年来的研究的热点和难点。
2、对建筑物进行三维重建,通常是基于建筑物的远探测数据。远探测数据多种多样,包括lidar数据(即三维点云数据),遥感图像数据等。由于lidar数据大多只包含空间几何信息,大大降低了目标场景解译和判读的难度,有利于实现建筑物的自动化建模。同时lidar数据生产周期短、自动化程度高、对环境的适应能力强,因此成为获取三维建筑物模型的重要数据源。但是lidar点云数据量很大,尽管目前国内外已经提出了多种方法对建筑物进行重建,但是对建筑物三维重建的重建效率仍旧有很大的提升空间。此外由于对建筑物单次采集的点云数据只能覆盖建筑物表面的一部分,得到的点云图像并不完整,导致构建出的建筑物的三维模型精度较低。
技术实现思路
1、为解决上述一个或多个技术问题,本发明提出通过对建筑物的远探测数据进行配准和滤波,并进行面片分割从而准确获取建筑物的轮廓并依据拓扑图对建筑物进行三维建模,从而大大提高建筑物三维重建的效率和精度。为此,本发明在如下的多个方面中提供方案。
2、在第一方面中,本发明提供了一种基于远探测数据的三维重建方法,包括:
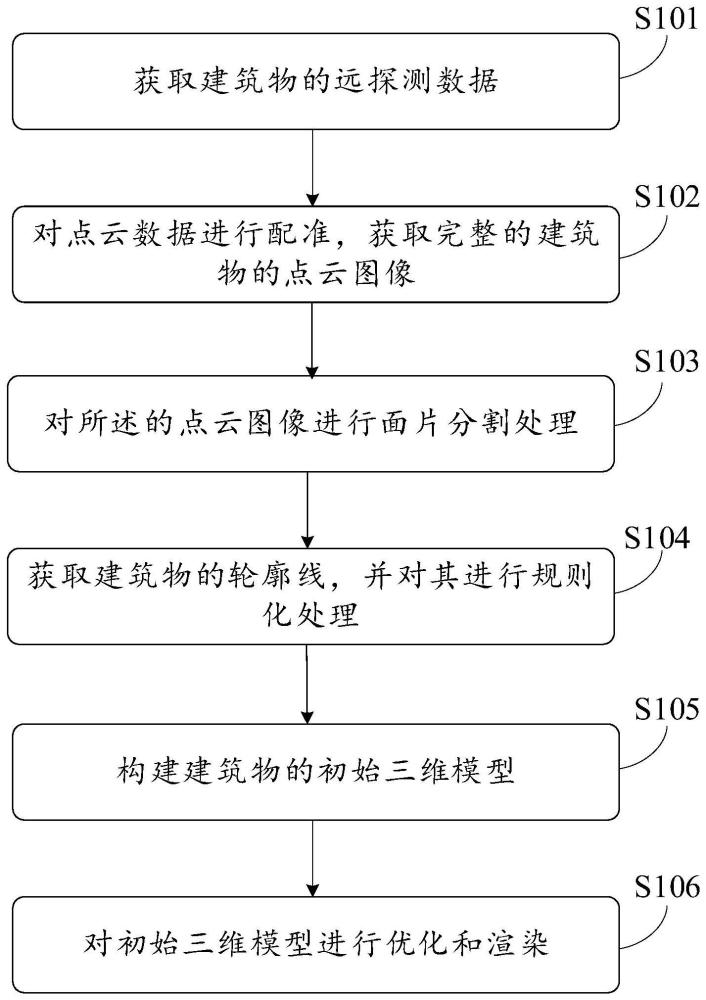
3、获取建筑物的远探测数据,所述远探测数据包括激光扫描仪从不同角度对建筑物进行扫描得到的多幅点云数据;
4、对点云数据进行配准,获取完整的建筑物的点云图像;
5、对所述的点云图像进行面片分割处理,在分割时采用经过优化处理的随机抽样一致性算法;
6、基于面片分割后的点云图像获取建筑物的轮廓线,并对其进行规则化处理;
7、依据建筑物的轮廓线并结合建筑物的拓扑图构建建筑物的初始三维模型;
8、对所述的初始三维模型进行优化和渲染,得到最终的建筑物三维模型,从而完成建筑物的三维重建。
9、在另一个实施例中,所述对点云数据进行配准包括以下步骤:
10、去除点云数据中的离散点并对采集的点云数据进行滤波得到更准确地点云数据;
11、从滤波后的所有点云数据中任选两幅点云数据,将其中一幅点云作为源点云,另一幅作为目标点云,求取两个点云数据之间的变换关系并将源点云变换到目标点云所处的坐标系下,从而完成点云配准过程。
12、在另一个实施例中,所述将源点云变换到目标点云所处的坐标系下具体包括以下过程:
13、依据目标点云和源点云获取两个全局特征,并将两个全局特征拼接在一起从而得到两个点云的合并特征;
14、把所述的合并特征输入预设的神经网络模型,得到平移向量和旋转矩阵,并依据所述平移向量和所述旋转矩阵对源点云进行旋转和平移。
15、在另一个实施例中,所述获取建筑物的轮廓线,并对其进行规则化处理,包括以下步骤:
16、对面片分割后的点云图像进行delaunay三角剖分,获取不规则三角形网络;
17、利用所述的不规则三角形网络提取建筑物的轮廓点,并对轮廓点进行排序,从而生成轮廓线;
18、从所述的轮廓线中提取轮廓的关键点,提取时采用关键点提取算法;
19、将所有的轮廓的关键点连接在一起,并对所述的轮廓线进行规则化处理,所述规则化处理采用正交约束方法。
20、在另一个实施例中,对轮廓点进行排序的方法采用基于向量的冒泡排序。
21、在另一个实施例中,所述构建建筑物的初始三维模型包括以下步骤:
22、从拓扑图中读取屋顶面邻接关系;
23、依据所述的屋顶面邻接关系计算出屋脊线;
24、搜索出屋顶拓扑图中的最小闭合环以及所示闭合环中与屋脊线对应的相关端点,并在某一交点处对所述的相关端点进行统一;
25、对所述屋脊线进行拓展处理;
26、按照一定规则将所述屋脊线和主要的屋顶面边界线连接成封闭的多边形;
27、构建出建筑物的墙面并将其与所述封闭多边形组合在一起,从而完成建筑物初始三维模型的构建。
28、在第二方面中,本发明提供了一种基于远探测数据的三维重建系统,包括存储器和处理器,所述存储器内存储有计算机程序,所述计算机程序被处理器执行时实现本发明的基于远探测数据的三维重建方法。
29、本发明的技术效果为:通过对建筑物的点云数据进行配准,依据完整的点云图像进行建模,从而可提高建筑物三维模型的精度;采用优化后的随机抽样一致性算法对多层次建筑物进行面片分割,优化的算法能够提供更高的执行效率,并能有效的删除建筑物墙面点,从而大大提高了建筑物三维模型构建的效率。
30、进一步地,通过在配准之前去除离散点并进行滤波处理,从而提供了配准的精度。
31、进一步地,使用轮廓线关键点提取算法提取轮廓的关键点,能够准确地提取建筑物的关键点,并能抑制错误轮廓点的干扰,减少伪关键点的生成。
技术特征:
1.一种基于远探测数据的三维重建方法,其特征在于,包括:
2.如权利要求1所述的基于远探测数据的三维重建方法,其特征在于,所述对点云数据进行配准包括以下步骤:
3.如权利要求2所述的基于远探测数据的三维重建方法,其特征在于,所述将源点云变换到目标点云所处的坐标系下具体包括以下过程:
4.如权利要求1所述的基于远探测数据的三维重建方法,其特征在于,所述获取建筑物的轮廓线,并对其进行规则化处理,包括以下步骤:
5.如权利要求4所述的基于远探测数据的三维重建方法,其特征在于,对轮廓点进行排序的方法采用基于向量的冒泡排序。
6.如权利要求1~5任意一项所述的基于远探测数据的三维重建方法,其特征在于,所述构建建筑物的初始三维模型包括以下步骤:
7.一种基于远探测数据的三维重建系统,包括存储器和处理器,所述存储器内存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1~6任意一项所述的基于远探测数据的三维重建方法。
技术总结
本发明涉及三维重建技术领域。具体涉及一种基于远探测数据的三维重建方法及系统。其中的方法包括:对点云数据进行配准,获取完整的建筑物的点云图像;对所述的点云图像进行面片分割处理,在分割时采用经过优化处理的随机抽样一致性算法;基于面片分割后的点云图像获取建筑物的轮廓线,并对其进行规则化处理;依据建筑物的轮廓线并结合建筑物的拓扑图构建建筑物的初始三维模型;对所述的初始三维模型进行优化和渲染。采用本发明的方法可大大提高建筑物三维重建的精度和效率。
技术研发人员:何泉,张尚,刘洋,郭靖,杨琪,宋鹏飞
受保护的技术使用者:西安恒歌数码科技有限责任公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!