一种遮挡行人检测方法及系统与流程
本发明涉及行人检测,更具体地,涉及一种遮挡行人检测方法及系统。
背景技术:
1、随着汽车数量的不断增加,汽车发生安全事故的频次呈上升趋势。为了更好的提高汽车驾驶的安全性,智能化在汽车上的应用越来越广泛,从l0级智能驾驶逐渐普及到了l2级智能驾驶。在智能驾驶领域,无人泊车也是个重要的功能,近年来各厂家也推出了无人泊车,极大提高了汽车的驾乘舒适性。但是当前的无人泊车还是要求在驾驶员的视野里面,完全自主的无人泊车则是当前各大厂家重点开发的功能。泊车场景需要考虑到遮挡成人、儿童的各种穿出,由于车库车辆种类较多,以及环境复杂,要求成人、儿童在走到过道前就要被检测出,从而判断是否进行刹车,避免发生碰撞。
2、在现有技术中,技术人员提出了多种方法实现对遮挡行人的检测或识别,公开号为cn113687348a,中国发明专利公开了一种《基于追踪微多普勒图的行人识别方法和装置》,该方案通过对所述雷达信号数据进行处理得到雷达点云数据;对所述雷达点云数据进行聚类和目标追踪,得到目标轨迹信息;基于目标轨迹信息筛选得到稳定存在的目标,再对稳定存在的目标进行微多普勒数据的提取,累积多帧有效的微多普勒数据得到目标微多普勒图;选取目标轨迹信息中的目标速度、距离、强度以及累积得到的目标微多普勒图作为有效特征;根据不同类别目标的多组雷达信号数据获得的有效特征训练分类器;利用分类器将各种类别目标的特征分类,筛选出具有行人属性的目标。该专利对行人的识别还是以点云为基础的,对于行人处于遮挡的场景,由于可探测到的点云数量较少,会导致识别不到行人。因此该专利不适用于遮挡场景。
3、此外,公开号:cn110554379a中国发明专利还公开了一种《基于微多普勒的人员检测方法及系统》该专利公开了基于微多普勒的人员检测方法,包括以下步骤。步骤一:选择七个身体部位参考点来展示快速行走和跑步期间身体部分的速度分布;步骤二:步行和跑步速度可以从较慢的多普勒频率中导出,该频率对应与躯干相关的更强的rcs响应,这些响应通过将人员建模为多个椭圆体的组合来计算;该专利对行人目标产生的微多普勒建立简单的微多普勒雷达模型,从而准确分辨出目标类型,检测精度可达到89%,大大缩短系统运行成本,提高防撞预警响应时间,避免多个传感器融合调试的匹配难题,解决了毫米波雷达无法精准的对探测物分类的问题。该专利主要通过微多普勒进行行人目标类型的识别,在行人处于无遮挡状态时,通过四肢和躯干的速度分布判断行人处于步行还是跑步状态,从而计算可能发生碰撞的时间;当横穿的行人穿出遮挡的车辆前,该方法无法对行人进行识别的,需等到行人完全暴露出来时才能进行识别。因此该方案不适用于遮挡场景。
4、综上,现有技术中行人检测方法无法适用于遮挡场景。
技术实现思路
1、本发明为解决现有技术中的问题,提供一种遮挡行人检测方法及系统,能够实现在遮挡场景下对行人的准确检测识别。
2、本发明的首要目的是为解决上述技术问题,本发明的技术方案如下:
3、本发明第一方面提供了一种遮挡行人检测方法,包括以下步骤:
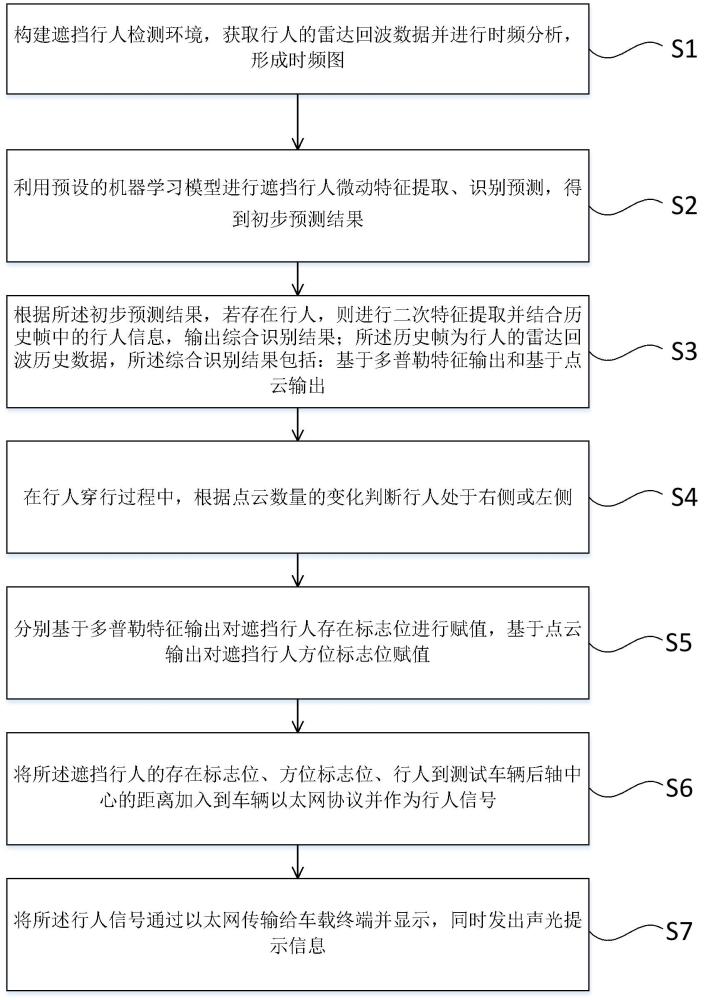
4、构建遮挡行人检测环境,获取行人的雷达回波数据并进行时频分析,形成时频图;
5、利用预设的机器学习模型进行遮挡行人微动特征提取、识别预测,得到初步预测结果;
6、根据所述初步预测结果,若存在行人,则进行二次特征提取并结合历史帧中的行人信息,输出综合识别结果;所述历史帧为行人的雷达回波历史数据,所述综合识别结果包括:基于多普勒特征输出和基于点云输出;
7、在行人穿行过程中,根据点云数量的变化判断行人处于右侧或左侧;
8、分别基于多普勒特征输出对遮挡行人存在标志位进行赋值,基于点云输出对遮挡行人方位标志位赋值;
9、将所述遮挡行人的存在标志位、方位标志位、行人到测试车辆后轴中心的距离加入到车辆以太网协议并作为行人信号;
10、将所述行人信号通过以太网传输给车载终端并显示,同时发出声光提示信息。
11、进一步的,所述构建遮挡行人检测环境,获取行人的雷达回波数据并进行时频分析,形成时频图,具体包括:
12、将成像雷达设置于测试车辆,同时在距离测试车车头预设位置处模拟车库的车辆停放,用于遮挡行人,成人、儿童分别从遮挡车辆的车尾步行到车头;
13、通过成像雷达输出遮挡成人、儿童的点云数据;
14、将测试车辆按预设速度向前行驶;
15、雷达波束透过遮挡车辆底盘,打到遮挡行人的小腿及脚部位置,形成回波数据,对接收到的回波进行时频分析,形成时频图。
16、进一步的,所述利用预设的机器学习模型进行遮挡行人微动特征提取、识别预测,得到初步预测结果,通过采集车库不同位置处的遮挡行人时频图,反复训练机器学习模型并优化,实现不同遮挡场景均能够稳定检出行人。
17、进一步的,根据所述初步预测结果,若存在行人,则进行二次特征提取并结合历史帧中的行人信息,输出综合识别结果,具体为:
18、根据所述初步预测结果,若存在行人,则进行二次特征提取,得到当前帧的行人特征,将当前帧的行人特征与历史帧的行人信息进行比对,若历史帧的行人信息中存在当前帧的行人特征,则输出当前帧的综合识别结果;所述历史帧的行人信息包括:行人距离、行人速度以及强度信息,所述行人距离即行人到测试车辆后轴中心的距离。
19、进一步的,在比对历史帧检测到的行人距离时,通过对比连续多帧的结果获取准确的行人距离。
20、进一步的,在行人穿行过程中,根据点云数量的变化判断出行人处于右侧或左侧,具体为:在行人穿行过程中,前进方向一侧积累的点云数量逐渐增加,背后方向一侧积累的点云数量逐渐减少,则对于测试车辆,若行人从车辆前方由左向右走过,则点云数量逐渐增加一侧为右侧,则点云数量逐渐减少的一侧为左侧;若行人从从车辆前方由右向左走过,则点云数量逐渐增加一侧为左侧,则点云数量逐渐减少的一侧为右侧。
21、进一步的,在根据点云数量的变化判断出行人处于右侧或左侧时,通过添加置信度的方式进行筛选点云再进行点云数量判断。
22、进一步的,分别基于多普勒特征输出对遮挡行人存在标志位进行赋值,具体为:遮挡行人存在标志位为0表示无人,遮挡行人存在标志位为1表示有人。
23、进一步的,遮挡行人方位标志位通过0、1、2表示,其中0表示未识别,1表示行人在车辆左侧,2表示行人在车辆右侧。
24、本发明第二方面提供了一种遮挡行人检测系统,该系统包括:存储器、处理器,所述存储器中包括一种遮挡行人检测方法程序,所述一种遮挡行人检测方法程序被所述处理器执行时实现如下步骤:
25、构建遮挡行人检测环境,获取行人的雷达回波数据并进行时频分析,形成时频图;
26、利用预设的机器学习模型进行遮挡行人微动特征提取、识别预测,得到初步预测结果;
27、根据所述初步预测结果,若存在行人,则进行二次特征提取并结合历史帧信息,输出综合识别结果;所述综合识别结果包括:基于多普勒特征输出和基于点云输出;
28、在行人穿行过程中,根据点云数量的变化判断行人处于右侧或左侧;
29、分别基于多普勒特征输出对遮挡行人存在标志位进行赋值,基于点云输出对遮挡行人方位标志位赋值;
30、将所述遮挡行人的存在标志位、方位标志位、行人到测试车辆的距离加入到车辆以太网协议并作为行人信号;
31、将所述行人信号通过以太网传输给车载终端并显示,同时发出声光提示信息。
32、与现有技术相比,本发明技术方案的有益效果是:
33、本发明通过雷达分别得到行人的点云数据和回波数据的时频图,利用机器学习模型先获取初步预测结果,基于初步预测结果进行二次特征提取并结合历史帧中的行人信息得到综合识别结果,即微多普勒特征输出的遮挡行人存在标志位,同时基于点云输出遮挡行人方位标志位,将两者不同标志位加入以太网发送车载终端并显示实现遮挡行人检测,本发明既实现了遮挡行人是否存在的检测,也实现了遮挡行人方位的检测,并且通过二次征提取并结合基于点云的输出提高了遮挡行人检测的准确度。
- 还没有人留言评论。精彩留言会获得点赞!