一种甲醇增程混动非公路宽体自卸车整车仿真方法及系统与流程
所属的技术人员能够理解,甲醇增程混动非公路宽体自卸车整车仿真方法各个方面可以实现为系统、方法或程序产品。因此,本公开的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
背景技术:
1、非公路宽体自卸车是一种基于重型自卸车发展起来的特殊非公路车辆,该车辆以其良好的价格优势和优于普通重型自卸车的性能赢得了中小型矿区的青睐。目前新能源电动重卡在换电系统的加持下,主要实现了在矿场、港口等场景的应用。而在长距离道路场景,无法保证沿途有充换电站,导致纯电驱动无法满足使用要求。比纯电便利,比油车经济性和环保性更好的增程混动重卡能很好地解决续航里程问题,因此在这类应用场景找到了生存发展空间。
2、而且甲醇成本优势明显,已经成为最清洁、最低碳、最经济的产业发展路径,甲醇在重卡领域的推广应用,对于新能源商用车产业的发展意义尤为重要。与传统纯电驱动相比,增程混动驱动系统拥有高达15-20%的节能率,是混动车型的性能倍增器,极大的提高了混动车型的经济性。
3、为了能够使甲醇增程混动与非公路宽体自卸车配合使用,一般需要进行仿真测试,行业内采用的动力经济性仿真手段有:avl cruise、gt drive、carsim、advisor等,但不论何种仿真手段在新能源车型仿真时,都会存在一定的缺陷,最重要的缺陷就是,这些仿真软件并不具备完全的编程能力,或不具有开放的建模能力,很难涵盖行业内所有的新能源技术路线及能量、功率管理策略。采用这些软件进行仿真时,大多需要与其他专门的控制策略编制软件联合仿真。
4、而且传统测试过程对非公路宽体自卸车动力性和经济性测试的没有有效的方式,测试结果准确性不高,影响非公路宽体自卸车后期使用。
技术实现思路
1、本发明提供一种甲醇增程混动非公路宽体自卸车整车仿真方法,借助经验算法,赋予修正系数,通过对驱动模式控制策略、能量回收控制策略的控制,到达获取整车动力性及经济性最优解的过程。
2、方法包括:
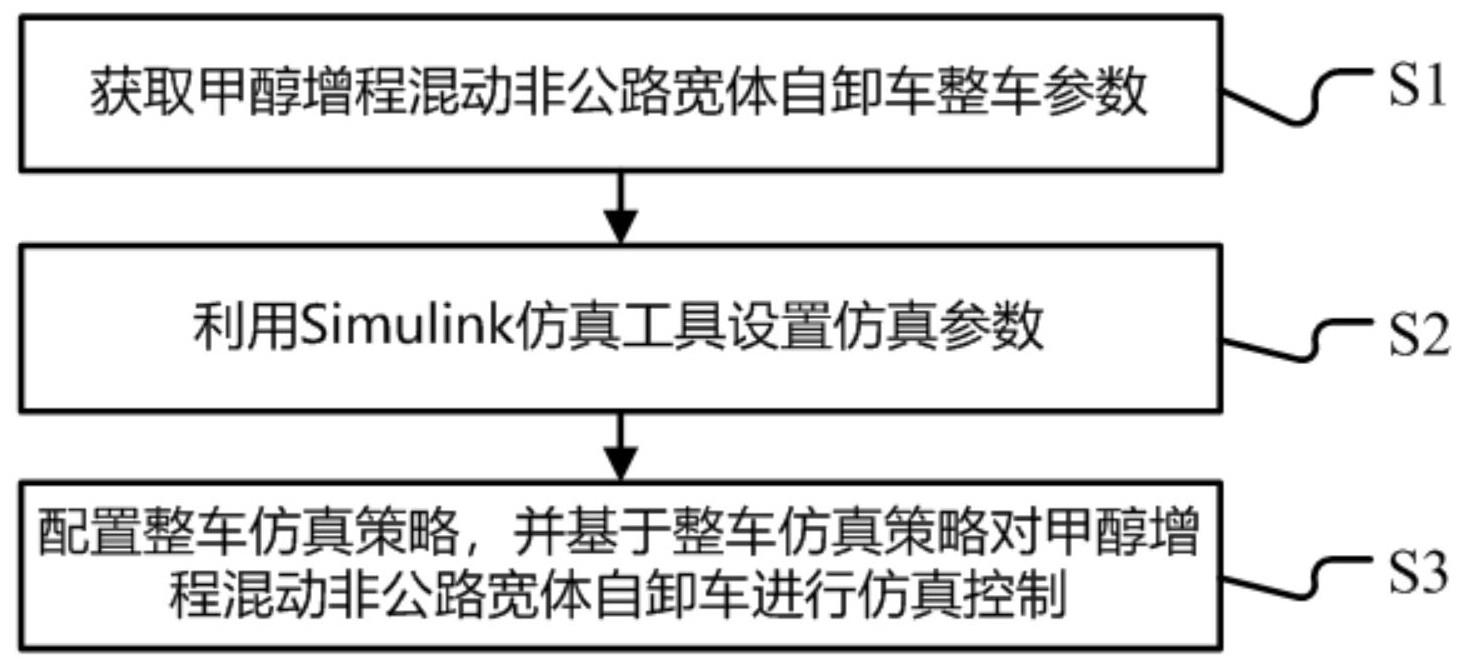
3、s1:获取甲醇增程混动非公路宽体自卸车整车参数;
4、s2:利用simulink仿真工具设置仿真参数;
5、s3:配置整车仿真策略,并基于整车仿真策略对甲醇增程混动非公路宽体自卸车进行仿真控制;
6、其中,整车仿真策略包括驱动模式控制策略和扭矩控制策略。
7、进一步需要说明的是,步骤s1中的甲醇增程混动非公路宽体自卸车整车参数包括:整车长、宽、高,满载质量和滑移质量,风阻信息,滚动阻力,迎风面积,轮距和轴距以及轮胎参数。
8、进一步需要说明的是,步骤s2中的仿真参数包括:发电机实际转速、pid调节系数、发动机最大扭矩、增程器速比、电池荷电状态、增程器启动功率阈值、增程器启动soc阈值、增程器关闭功率阈值、增程器关闭soc阈值、负载信号、电机最大扭矩、电机当前转速、制动踏板开度、车速、电机最大制动扭矩、传动系统效率、传动系速比、整车最大制动扭矩、电制动车速修正系数以及电制动修正系数。
9、进一步需要说明的是,步骤s3中的驱动模式控制策略包括:需求功率计算、模式状态判断及各模式控制逻辑。
10、进一步需要说明的是,,需求功率的计算方式为:
11、驱动功率=负载信号×电机最大扭矩×电机转速/9550;
12、需求功率=驱动功率+附件功率;
13、需求功率作为增程器发电功率,通过需求功率查询发动机目标转速。
14、进一步需要说明的是,模式状态判断的判断条件由simulink计算完成,输出相应的标志位信号给stateflow模块,stateflow模块完成模式转移。
15、进一步需要说明的是,模式控制逻辑包括:发动机启动控制模式和增程模式。
16、扭矩控制策略包括:制动能量回收策略及驱动电机控制策略;
17、制动能量回收策略包括制动模式判断和电制动需求扭矩计算;
18、制动模式判断:
19、当车速≥1且制动踏板开都>0时,认为车辆处于制动模式;
20、电制动需求扭矩计算方式为:
21、整车制动扭矩需求=制动踏板开度×整车最大制动扭矩;
22、电机端制动扭矩=整车制动扭矩需求/速比/效率;
23、机械制动扭矩=整车制动扭矩需求-电机端制动扭矩×速比×效率。
24、进一步需要说明的是,驱动电机控制策略是通过电制动条件判断电机负载输出,满足电制动条件时,输出为电制动负载,不满足时输出驱动负载。
25、本发明还提供一种甲醇增程混动非公路宽体自卸车整车仿真系统,系统包括:参数获取模块、simulink仿真工具以及仿真控制模块;
26、参数获取模块用于设置供用户输入参数的输入装置,以使系统获取甲醇增程混动非公路宽体自卸车整车参数;
27、simulink仿真工具获取用户设置或系统定义的仿真参数;
28、仿真控制模块用于配置整车仿真策略,并基于整车仿真策略对甲醇增程混动非公路宽体自卸车进行仿真控制;
29、其中,整车仿真策略包括驱动模式控制策略和扭矩控制策略。
30、从以上技术方案可以看出,本发明具有以下优点:
31、本发明基于simulink仿真工具,并结合获取的参数以契合非道路宽体自卸车实际工况,达到动力性、经济性仿真的高度符合性,实现了甲醇增程混动非公路宽体自卸车在整车性能匹配的合理性验证,从而保证整车在可靠性实车验证的理想效果,同时节省了大量的人力物力,极为可贵的是以极低的成本介入方案更改,对更改后方案进行动力性、经济性的仿真验证,证明方案的真实性、可靠性。
32、本发明涉及的方法及系统还基于甲醇增程混动非公路宽体自卸车全新混动构型下的特定工况需求, 以matlab/simulink平台搭建完成;涉及增程发电机参数及启动/关闭功率阈值、启动/关闭soc阈值、pid调节系数、发动机参数、电池参数、附件功率、车速、传动系统参数等等,满足甲醇增程混动非公路宽体自卸车在特定工况下的功率跟随策略整车仿真的需要,同时增加经验系数对结果进行修正已达到接近真实场景的目的,提升了仿真结果对动力性和经济性的要求。
技术特征:
1.一种甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,方法包括:
2.根据权利要求1所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,步骤s1中的甲醇增程混动非公路宽体自卸车整车参数包括:整车长、宽、高,满载质量和滑移质量,风阻信息,滚动阻力,迎风面积,轮距和轴距以及轮胎参数。
3.根据权利要求1所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,步骤s2中的仿真参数包括:发电机实际转速、pid调节系数、发动机最大扭矩、增程器速比、电池荷电状态、增程器启动功率阈值、增程器启动soc阈值、增程器关闭功率阈值、增程器关闭soc阈值、负载信号、电机最大扭矩、电机当前转速、制动踏板开度、车速、电机最大制动扭矩、传动系统效率、传动系速比、整车最大制动扭矩、电制动车速修正系数以及电制动修正系数。
4.根据权利要求1所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,步骤s3中的驱动模式控制策略包括:需求功率计算、模式状态判断及各模式控制逻辑。
5.根据权利要求4所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,需求功率的计算方式为:
6.根据权利要求4所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,模式状态判断的判断条件由simulink计算完成,输出相应的标志位信号给stateflow模块,stateflow模块完成模式转移。
7.根据权利要求4所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,模式控制逻辑包括:发动机启动控制模式和增程模式。
8.根据权利要求1所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,扭矩控制策略包括:制动能量回收策略及驱动电机控制策略;
9.根据权利要求8所述的甲醇增程混动非公路宽体自卸车整车仿真方法,其特征在于,驱动电机控制策略是通过电制动条件判断电机负载输出,满足电制动条件时,输出为电制动负载,不满足时输出驱动负载。
10.一种甲醇增程混动非公路宽体自卸车整车仿真系统,其特征在于,系统采用如权利要求1至9任一项所述甲醇增程混动非公路宽体自卸车整车仿真方法;
技术总结
本发明提供一种甲醇增程混动非公路宽体自卸车整车仿真方法,属于整车混动技术仿真领域,方法包括:S1:获取甲醇增程混动非公路宽体自卸车整车参数;S2:利用Simulink仿真工具设置仿真参数;S3:配置整车仿真策略,并基于整车仿真策略对甲醇增程混动非公路宽体自卸车进行仿真控制;其中,整车仿真策略包括驱动模式控制策略和扭矩控制策略。本发明通过Matlab/Simulink工具搭建甲醇增程混合动力整车模型,对整车的控制策略、动力性、经济性进行测试,在设计初期就可以直管的反应设计需求,进行系统设计,并通过不断的仿真对设计进行验证,实现获取整车动力性及经济性最优解的过程。
技术研发人员:苏达,赖延年,代俊桐,栾会磊
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!