一种角点检测的优化方法、装置、电子设备和存储介质与流程
本发明涉及智能驾驶,尤其涉及一种角点检测的优化方法、装置、电子设备和存储介质。
背景技术:
1、角点通常被定义为两条边的交点,或者说,角点的局部邻域应该具有两个不同区域的不同方向的边界。角点检测(corner detection)是计算机视觉系统中获取图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维重建和目标识别等,也可称为特征点检测。
技术实现思路
1、本发明提供了一种角点检测的优化方法、装置、电子设备和存储介质。
2、根据本发明的一方面,提供了一种角点检测的优化方法,包括:
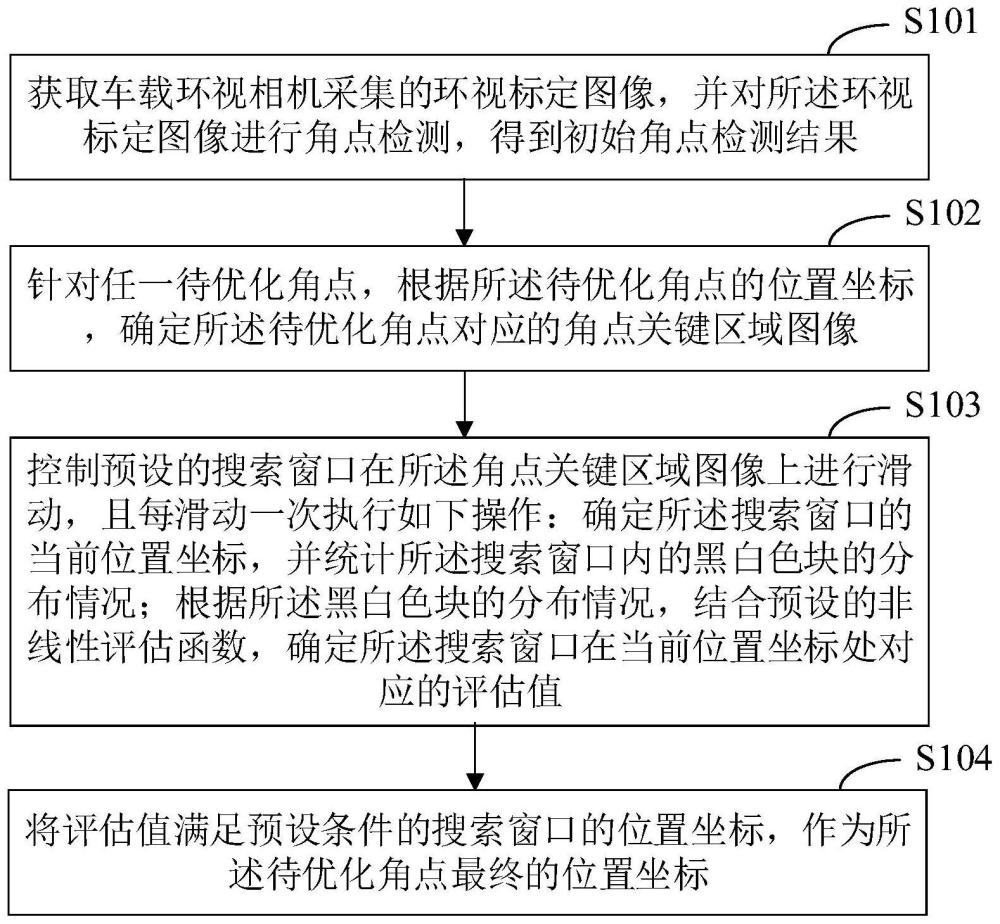
3、获取车载环视相机采集的环视标定图像,并对所述环视标定图像进行角点检测,得到初始角点检测结果;其中,所述环视标定图像是由黑白色块组成的棋盘格图像;所述初始角点检测结果包括至少一个待优化角点以及待优化角点的位置坐标;
4、针对任一待优化角点,根据所述待优化角点的位置坐标,确定所述待优化角点对应的角点关键区域图像;
5、控制预设的搜索窗口在所述角点关键区域图像上进行滑动,且每滑动一次执行如下操作:确定所述搜索窗口的当前位置坐标,并统计所述搜索窗口内的黑白色块的分布情况;根据所述黑白色块的分布情况,结合预设的非线性评估函数,确定所述搜索窗口在当前位置坐标处对应的评估值;
6、将评估值满足预设条件的搜索窗口的位置坐标,作为所述待优化角点最终的位置坐标。
7、根据本发明的另一方面,提供了一种角点检测的优化装置,包括:
8、角点检测模块,用于获取车载环视相机采集的环视标定图像,并对所述环视标定图像进行角点检测,得到初始角点检测结果;其中,所述环视标定图像是由黑白色块组成的棋盘格图像;所述初始角点检测结果包括至少一个待优化角点以及待优化角点的位置坐标;
9、角点关键区域确定模块,用于针对任一待优化角点,根据所述待优化角点的位置坐标,确定所述待优化角点对应的角点关键区域图像;
10、评估模块,用于控制预设的搜索窗口在所述角点关键区域图像上进行滑动,且每滑动一次执行如下操作:确定所述搜索窗口的当前位置坐标,并统计所述搜索窗口内的黑白色块的分布情况;根据所述黑白色块的分布情况,结合预设的非线性评估函数,确定所述搜索窗口在当前位置坐标处对应的评估值;
11、优化模块,用于将评估值满足预设条件的搜索窗口的位置坐标,作为所述待优化角点最终的位置坐标。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明实施例所述的角点检测的优化方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明实施例所述的角点检测的优化方法。
17、本发明实施例的技术方案,通过对检测到角点进行优化,可以保证得到角点位置坐标的准确性。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种角点检测的优化方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,统计所述搜索窗口内的黑白色块的分布情况,包括:
3.根据权利要求2所述的方法,其特征在于,所述非线性评估函数为预设的高斯函数;
4.根据权利要求1所述的方法,其特征在于,对所述环视标定图像进行角点检测,得到初始角点检测结果,包括:
5.根据权利要求4所述的方法,其特征在于,对所述环视标定图像进行畸变矫正,包括:
6.根据权利要求4所述的方法,其特征在于,基于畸变矫正后的环视标定图像生成鸟瞰图像,包括:
7.根据权利要求1所述的方法,其特征在于,还包括:
8.一种角点检测的优化装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结
本发明公开一种角点检测的优化方法、装置、电子设备和存储介质。方法包括:对获取的环视标定图像进行角点检测,得到包括待优化角点的角点检测结果;环视标定图像是由黑白色块组成的棋盘格图像;针对任一待优化角点,根据待优化角点的位置坐标,确定待优化角点对应的角点关键区域图像;控制预设的搜索窗口在角点关键区域图像上进行滑动,且每滑动一次执行如下操作:确定搜索窗口的当前位置坐标,并统计搜索窗口内的黑白色块的分布情况;根据黑白色块的分布情况,结合预设的非线性评估函数,确定搜索窗口在当前位置坐标处对应的评估值;将评估值满足预设条件的搜索窗口的位置坐标,作为待优化角点最终的位置坐标。本发明提高了角点检测的准确性。
技术研发人员:王栋梁,张伟伟,高立
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!