一种基于视觉识别的燃油喷嘴喷雾角度测量方法及系统与流程
本发明涉及喷嘴测试,尤其是涉及一种基于视觉识别的燃油喷嘴喷雾角度测量方法及系统。
背景技术:
1、喷嘴是飞机喷气发动机的组成部分,用于喷出高速气流以产生推力,通过可调节的喷嘴,可以改变其喷气方向以控制飞机的姿态、速度和方向,并且对于保持飞机的平衡和稳定性也至关重要。
2、喷嘴喷雾角度测试是喷嘴测试中的重要测试项目,喷嘴喷雾角度的准确性对于发动机的性能、燃烧效率和排放控制至关重要,不正确的喷雾角度可能导致燃烧不均匀、高温区域、污染物生成和降低发动机寿命,目前飞机发动机燃油喷嘴角度的测量方法通常是通过移动测试探针至喷雾处,测量探针之间的距离从而计算喷雾角度,测试探针的移动位置以及距离的测量都可能存在误差,导致对喷嘴角度测量不准确,如何提高测量喷嘴喷雾的角度的准确性是目前亟待解决的问题。
技术实现思路
1、为了提高测量喷嘴角度的准确性,本申请提供了一种基于视觉识别的燃油喷嘴喷雾角度测量方法及系统。
2、第一方面,本申请提供的一种基于视觉识别的燃油喷嘴喷雾角度测量方法,采用如下的技术方案:
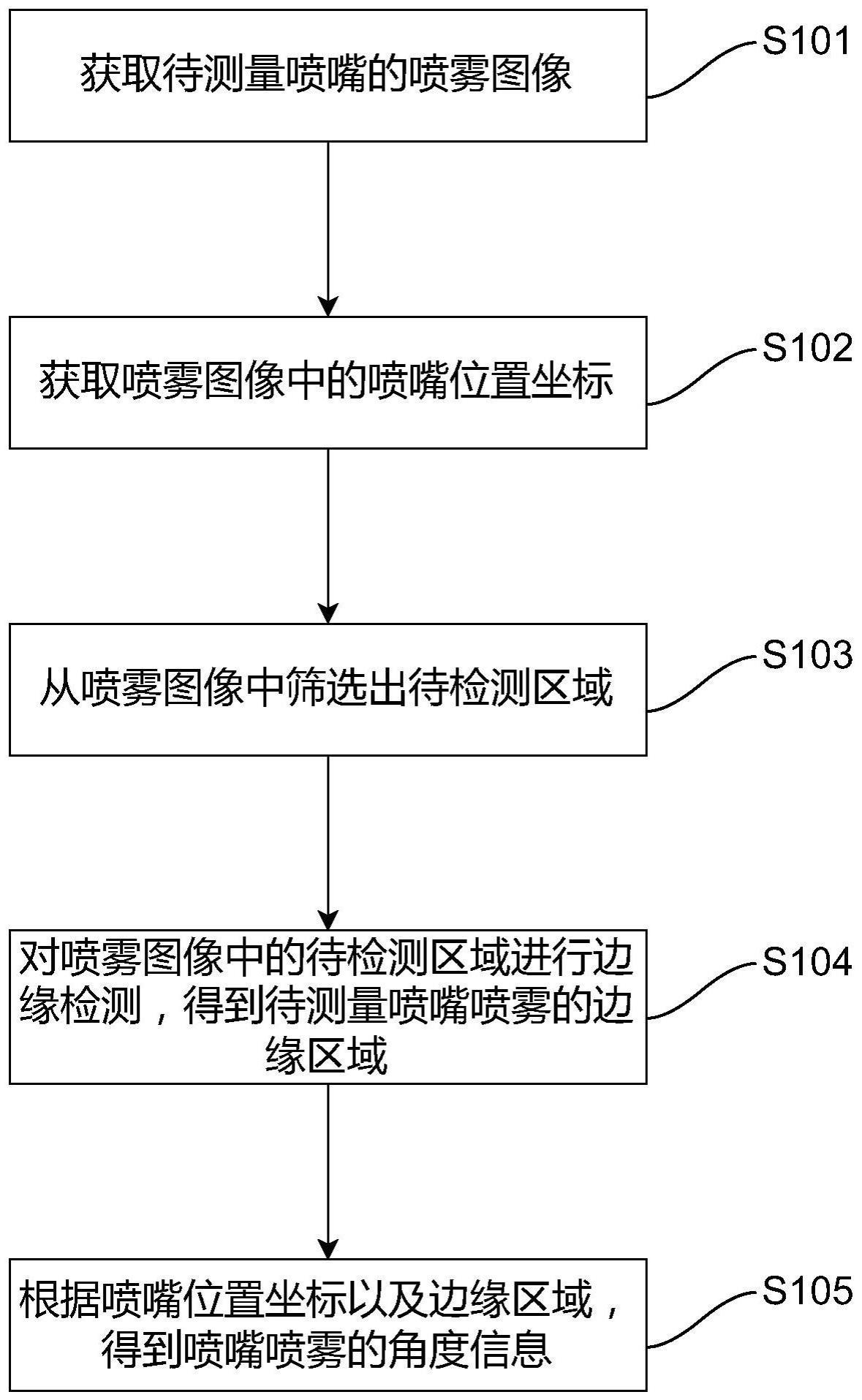
3、一种基于视觉识别的燃油喷嘴喷雾角度测量方法,包括:
4、获取待测量喷嘴的喷雾图像;
5、获取喷雾图像中的喷嘴坐标;
6、从喷雾图像中筛选出待检测区域;
7、对喷雾图像中的待检测区域进行边缘检测,得到待测量喷嘴喷雾的边缘区域;
8、根据喷嘴坐标以及边缘区域,得到喷嘴喷雾的角度信息。
9、通过采用上述技术方案,对喷雾图像中的待检测区域进行边缘检测,通过对喷雾图像中待测量喷嘴产生的喷雾区域的边缘进行提取,得到边缘区域,由于喷嘴的喷雾通常是以喷嘴坐标为中心的锥形区域,通过边缘区域的趋势并结合喷嘴坐标边缘以便确定出锥形区域,通过视觉识别的方法有助提高获取喷嘴喷雾的角度信息的准确性。
10、可选的,所述对喷雾图像中的待检测区域进行边缘检测,得到待测量喷嘴喷雾的边缘区域,具体包括:
11、对喷雾图像进行梯度计算,得到喷雾图像中每个像素格的梯度幅度;
12、根据梯度幅度,搜索喷雾图像中的局部极大值,得到极大值像素格;
13、根据极大值像素格对喷雾图像进行二值化处理以及去噪处理,得到二值化图像;
14、对二值化图像进行连通处理,得到待测量喷嘴喷雾的边缘区域。
15、通过采用上述技术方案,通过计算喷雾图像中每个像素格的梯度幅度,以便得到喷雾图像中每个像素点的灰度级的变化程度,在通过搜索局部极大值的方式选出边缘处的极大值像素格,并对极大值像素格进行二值化处理和去噪处理,得到便于分辨的二值化图像,再对二值化图像进行连通处理,以平滑二值化图像的边缘,从而实现了待测量喷嘴喷雾的边缘区域的识别。
16、可选的,所述根据喷嘴坐标以及边缘区域,得到喷嘴喷雾的角度信息,具体包括:
17、基于喷嘴坐标,对标准回归方程进行修改,得到优化回归方程;
18、将边缘区域中的每一个像素格中心作为一个有效点;
19、基于优化回归方程,对同一边缘区域的所有有效点进行线性回归运算,得到对应边缘区域的回归直线;
20、根据回归直线的斜率,得到喷嘴喷雾的角度信息。
21、通过采用上述技术方案,由于喷嘴所产生的喷雾是以喷嘴坐标为起点的,所以边缘区域一定会过喷嘴坐标,对标准回归方程进行改进,以使得改进后的优化回归方程经过喷嘴坐标,将边缘区域中的每一个像素格的中心作为有效点,并基于优化回归方程对所有有效点进行线性回归运算,由于得到的回归直线一定是过喷嘴坐标的,所以通过回归直线的斜率即能够得到喷嘴喷雾的角度信息。
22、可选的,还包括,对角度信息的校验步骤,所述校验步骤具体包括:
23、获取每个所述回归直线的标准估计误差值;
24、根据标准估计误差值,估算角度信息的准确度。
25、通过采用上述技术方案,利用标准估计误差值以便得到各个有效点与回归直线的拟合程度,拟合程度越大说明该有效点准确性高,从而便于根据标准估计误差值分析出最终角度信息的准确度。
26、可选的,所述从喷雾图像中筛选出待检测区域,具体包括:
27、获取待检测喷嘴的标准喷雾角度;
28、根据喷嘴坐标和标准喷雾角度,得到喷雾图像的待检测区域。
29、通过采用上述技术方案,基于标准喷嘴角度和喷嘴坐标得到的待检测区域是待检测喷嘴所产生喷雾的可能范围,仅对待检测区域进行检测,大大减小了数据的处理量。
30、可选的,所述根据梯度幅度,搜索喷雾图像中的局部极大值,得到极大值像素格,具体包括:
31、预先设定梯度幅度阈值;
32、根据梯度幅度,搜索喷雾图像中的局部极大值,并基于梯度幅度阈值对局部极大值进行筛选,得到极大值像素格。
33、通过采用上述技术方案,通过梯度幅度阈值的设置以便筛选出梯度幅度所表征的灰度变化大的像素格为极大值像素格,从而减小了极大值像素格误判的可能性。
34、可选的,所述根据梯度幅度,搜索喷雾图像中的局部极大值,得到极大值像素格之后,还包括:
35、若极大值像素格的个数小于预设个数,则判定边缘区域识别失败,并终止对应待测量喷嘴的角度测量。
36、通过采用上述技术方案,若极大值像素格的个数小于预设个数则说明待检测区域中没有检测到足够多的过程喷雾边缘的极大值像素格,即边缘区域识别失败,后无法对待测量喷嘴的角度进行测试,此时立即终止对待测量喷嘴的角度测试,不执行后续操作,以节约程序运行时间。
37、第二方面,本申请提供一种基于视觉识别的燃油喷嘴喷雾角度测量系统,采用如下技术方案:
38、一种基于视觉识别的燃油喷嘴喷雾角度测量系统,包括:
39、图像获取模块,用于获取待测量喷嘴的喷雾图像;
40、喷嘴位置获取模块,用于获取喷雾图像中的喷嘴坐标;
41、区域获取模块,用于从喷雾图像中筛选出待检测区域;
42、边缘区域识别模块,用于对喷雾图像中的待检测区域进行边缘检测,得到待测量喷嘴喷雾的边缘区域;
43、角度信息识别模块,用于根据喷嘴坐标以及边缘区域,得到喷嘴喷雾的角度信息。
44、第三方面,本申请提供一种计算机设备,采用如下技术方案:
45、一种计算机设备,包括存储器、处理器以及储存在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行如上述任一种方法的计算机程序。
46、第四方面,本申请提供一种计算机可读存储介质,采用如下技术方案:
47、一种计算机可读存储介质,包括存储有能够被处理器加载并执行如上述任一方法中的计算机程序。
技术特征:
1.一种基于视觉识别的燃油喷嘴喷雾角度测量方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述对喷雾图像中的待检测区域进行边缘检测,得到待测量喷嘴喷雾的边缘区域,具体包括:
3.根据权利要求1所述的方法,其特征在于,所述根据喷嘴坐标以及边缘区域,得到喷嘴喷雾的角度信息,具体包括:
4.根据权利要求3所述的方法,其特征在于,还包括,对角度信息的校验步骤,所述校验步骤具体包括:
5.根据权利要求1所述的方法,其特征在于,所述从喷雾图像中筛选出待检测区域,具体包括:
6.根据权利要求2所述的方法,其特征在于,所述根据梯度幅度,搜索喷雾图像中的局部极大值,得到极大值像素格,具体包括:
7.根据权利要求1所述的方法,其特征在于:所述根据梯度幅度,搜索喷雾图像中的局部极大值,得到极大值像素格之后,还包括:
8.一种基于视觉识别的燃油喷嘴喷雾角度测量系统,其特征在于,包括:
9.一种计算机设备,其特征在于:包括存储器、处理器以及储存在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行如权利要求1-7中任一种方法的计算机程序。
10.一种计算机可读存储介质,其特征在于,包括存储有能够被处理器加载并执行如权利要求1-7中任一方法中的计算机程序。
技术总结
本申请涉及一种基于视觉识别的燃油喷嘴喷雾角度测量方法及系统,属于喷嘴测试技术领域,基于视觉识别的燃油喷嘴喷雾角度测量方法包括获取待测量喷嘴的喷雾图像;获取喷雾图像中的喷嘴坐标;从喷雾图像中筛选出待检测区域;对喷雾图像中的待检测区域进行边缘检测,得到待测量喷嘴喷雾的边缘区域;根据喷嘴坐标以及边缘区域,得到喷嘴喷雾的角度信息。过对喷雾图像中待测量喷嘴产生的喷雾区域的边缘进行提取,得到边缘区域,由于喷嘴的喷雾通常是以喷嘴坐标为中心的锥形区域,通过边缘区域的趋势并结合喷嘴坐标边缘以便确定出锥形区域,通过视觉识别的方法获取角度信息。本申请具有提高获取喷嘴喷雾的角度信息的准确性的效果。
技术研发人员:王欢
受保护的技术使用者:北京航顺泰达科技发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!