数据分类方法、装置、计算机设备和存储介质与流程
本技术涉及自动驾驶,特别是涉及一种数据分类方法、装置、计算机设备和存储介质。
背景技术:
1、在自动驾驶领域的深度学习训练过程中,需要大量带有标签的点云数据。因此,在对点云数据的处理过程中,对点云数据集进行分类,得到不同类别的点云数据子集。在不同类别的点云数据子集中确定需要标注的目标数据,能够有效减少需要标注的数据的数量,进而提高标注效率。
2、目前,对数据分类可以使用支持向量机等机器学习的方法,例如,基于支持向量机算法对点云数据集进行分类,得到多个不同类型的点云数据子集,将各不同类型的点云数据子集作为点云数据子集的分类结果。
3、然而,由于采用传统的支持向量机算法需要数据具有有序性,但是点云数据集具有无序性,因此,基于支持向量机算法直接对点云数据集进行分类,得到的分类结果并不准确,进而影响后续下游任务(如检测,分割等)深度学习训练的稳定性。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种数据分类方法、装置、计算机设备和计算机可读存储介质。
2、第一方面,本技术提供了一种数据分类方法,包括:
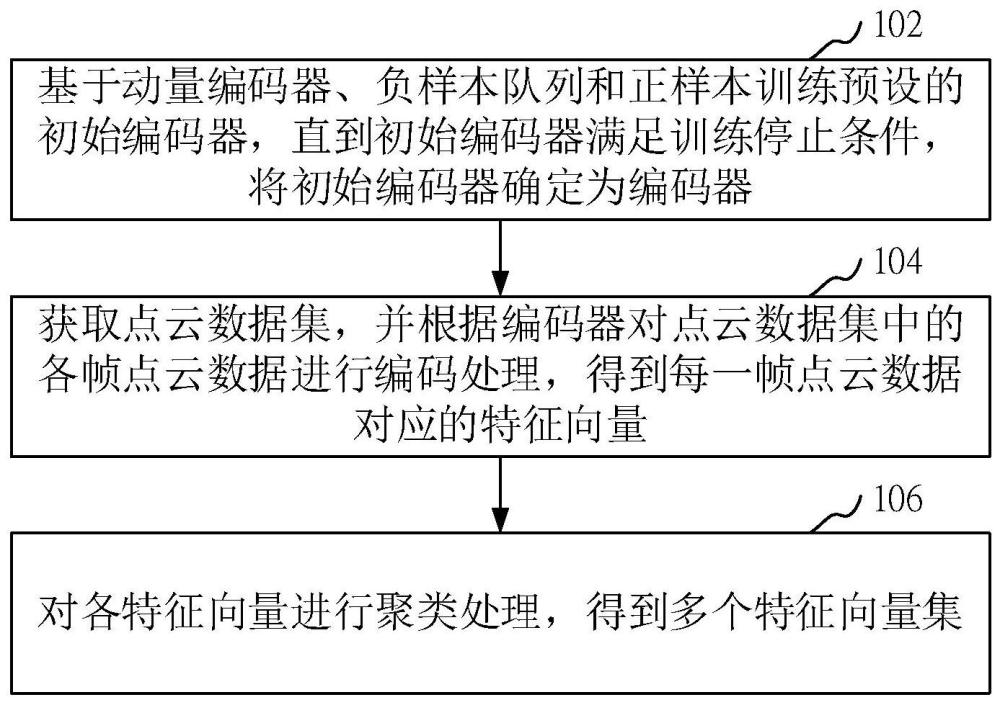
3、基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器;
4、获取点云数据集,并根据所述编码器对所述点云数据集中的各帧点云数据进行编码处理,得到每一帧所述点云数据对应的特征向量;
5、对各所述特征向量进行聚类处理,得到多个特征向量集;所述特征向量集表征一个类型的点云数据;所述特征向量集用于场景分类。
6、在其中一个实施例中,所述基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器,包括:
7、获取点云训练数据集;所述点云训练数据集中包含各批次点云训练数据;
8、基于预设的初始编码器和动量编码器对当前批次点云训练数据进行编码处理,并确定正样本;
9、基于所述正样本和负样本队列对所述初始编码器和所述动量编码器进行训练,在所述初始编码器不满足训练停止条件的情况下,基于所述正样本更新所述负样本队列,得到更新后的负样本队列;
10、将所述当前批次点云训练数据的下一批次的点云训练数据更新为所述当前批次点云训练数据,执行所述基于预设的初始编码器和动量编码器对当前批次点云训练数据进行编码处理,并确定正样本的步骤,直至所述初始编码器满足所述训练停止条件,得到编码器。
11、在其中一个实施例中,所述获取点云训练数据集,包括:
12、获取点云训练数据集,并根据预设的点云增强算法对所述点云训练数据集中的各批次点云训练数据进行数据增强,得到增强点云训练数据集;
13、所述基于预设的初始编码器和动量编码器对当前批次点云训练数据进行编码处理,并确定正样本,包括:
14、基于预设的初始编码器和动量编码器对当前批次增强点云训练数据进行编码处理得到样本特征向量,并根据所述样本特征向量确定正样本。
15、在其中一个实施例中,所述数据增强包括真值采样和随机增强中的至少一个数据增强方式。
16、在其中一个实施例中,所述增强点云训练数据包括第一增强点云训练数据和第二增强点云训练数据,所述根据预设的点云增强算法对所述点云训练数据集中的各批次点云训练数据进行数据增强,得到增强点云训练数据集,包括:
17、针对所述点云训练数据集中的每一批次中的每一帧点云训练数据,在预设的样本数据库中确定所述点云训练数据匹配的添加样本集;
18、分别根据所述添加样本集中的目标添加样本对所述点云训练数据进行数据增强,得到第一初始增强点云训练数据和第二初始增强点云训练数据;
19、根据预设的点云增强算法,对所述第一初始增强点云训练数据和所述第二初始增强点云训练数据进行随机增强处理,得到所述第一增强点云训练数据和所述第二增强点云训练数据;所述第一增强点云训练数据与所述第二增强点云训练数据包含不同的添加样本特征和/或不同的随机增强特征。
20、在其中一个实施例中,所述基于预设的初始编码器和动量编码器对当前批次增强点云训练数据进行编码处理得到样本特征向量,并根据所述样本特征向量确定正样本,包括:
21、根据预设的初始编码器对所述当前批次增强点云训练数据中的第一增强点云训练数据进行编码处理,得到第一样本特征向量;
22、根据预设的动量编码器对所述当前批次增强点云训练数据中的第二增强点云训练数据进行编码处理,得到第二样本特征向量;
23、将所述第一样本特征向量确定为锚点,并将所述第二样本特征向量确定为正样本。
24、在其中一个实施例中,所述基于所述正样本和负样本队列对所述初始编码器和所述动量编码器进行训练,包括:
25、根据所述锚点、所述正样本和负样本队列更新所述初始编码器的参数;
26、基于所述初始编码器的参数和预设的动量系数更新所述动量编码器的参数。
27、在其中一个实施例中,所述对各所述特征向量进行聚类处理,得到多个特征向量集,包括:
28、对各所述特征向量进行聚类处理,得到多个聚类中心;
29、将属于同一聚类中心的特征向量构建为同一类别的特征向量集,得到多个不同类型的特征向量集。
30、在其中一个实施例中,所述对各所述特征向量进行聚类处理,得到多个特征向量集之后,还包括:
31、获取标注数据需求,并基于所述标注数据需求中包含的目标类型,在各所述特征向量集确定所述目标类型的目标特征向量集;
32、确定所述目标特征向量集对应的目标点云数据集,并基于所述标注数据需求中包含的标注数量,在目标点云数据集中获取包含所述标注数量的点云数据的标注点云数据集。
33、第二方面,本技术还提供了一种数据分类装置,包括:
34、训练模块,用于基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器;
35、编码模块,用于获取点云数据集,并根据所述编码器对所述点云数据集中的各帧点云数据进行编码处理,得到每一帧所述点云数据对应的特征向量;
36、聚类模块,用于对各所述特征向量进行聚类处理,得到多个特征向量集;所述特征向量集表征一个类型的点云数据;所述特征向量集用于场景分类。
37、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
38、基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器;
39、获取点云数据集,并根据所述编码器对所述点云数据集中的各帧点云数据进行编码处理,得到每一帧所述点云数据对应的特征向量;
40、对各所述特征向量进行聚类处理,得到多个特征向量集;所述特征向量集表征一个类型的点云数据;所述特征向量集用于场景分类。
41、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
42、基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器;
43、获取点云数据集,并根据所述编码器对所述点云数据集中的各帧点云数据进行编码处理,得到每一帧所述点云数据对应的特征向量;
44、对各所述特征向量进行聚类处理,得到多个特征向量集;所述特征向量集表征一个类型的点云数据;所述特征向量集用于场景分类。
45、上述数据分类方法、装置、计算机设备和存储介质计算机程序产品,基于动量编码器、负样本队列和正样本训练预设的初始编码器,直到所述初始编码器满足训练停止条件,将所述初始编码器确定为编码器;获取点云数据集,并根据所述编码器对所述点云数据集中的各帧点云数据进行编码处理,得到每一帧所述点云数据对应的特征向量;对各所述特征向量进行聚类处理,得到多个特征向量集;所述特征向量集表征一个类型的点云数据;所述特征向量集用于场景分类。采用本方法,基于动量编码器、正样本和负样本队列对初始编码器进行训练,得到编码器,并基于编码器提取各帧点云数据的特征向量,提高了特征向量的准确性,并且对各特征向量进行聚类处理,得到各特征向量集,得到了准确的分类结果,提高了数据分类方法的准确性。
- 还没有人留言评论。精彩留言会获得点赞!