一种海洋水色水温扫描仪箝位修正方法及计算机可读介质
本发明属于海洋光学遥感,尤其涉及一种海洋水色水温扫描仪箝位修正方法及计算机可读介质。
背景技术:
1、cocts是光机扫描式传感器,在一个扫描周期内依次采集冷空、地球目标和头部黑体的信号值。探测器接收辐射亮度后通过光电转换将其转换为电信号,然后对其进行交流放大,但这样只能表示入射辐射的相对大小而无法反映辐亮度的绝对数值。为了建立入射辐射与输出信号之间的绝对关系,需要在冷空区域对信号进行直流恢复(即“箝位”),将电平强行箝位至基准电平,并将其作为辐射参考基准。
2、理论上可见光近红外波段的箝位基准信号与黑体信号相等(均为零),但由于卫星在轨运行过程中冷空域受到未知辐射的“污染”,使得箝位基准信号发生漂移(不为零,并随着扫描线位置、季节、地物目标反射率等变化而波动),卫星探测器输出的电平值远小于实际值,有的通道和区域甚至出现截止现象,严重影响了海洋遥感数据的应用及后续水色产品的定量生产。
3、因此,有必要针对cocts辐射基准信号漂移的问题开展成因和规律研究,突破cocts箝位漂移恢复技术,以发挥水色水温遥感数据的利用价值。我国对这些积累的历史遥感资料高度重视,于2018年发起了国家重点研发计划项目“国产多系列遥感卫星历史资料再定标技术”。本发明基于cocts可见/近红外通道数据,利用深度学习方法建立网络模型对“污染”数据进行修复及结果评价,为“国产系列遥感卫星历史资料重定标”计划和我国海洋水色信息的多个时刻观测数据库建设提供技术参考。
技术实现思路
1、针对已发射海洋水色水温扫描仪箝位基准漂移的问题,本发明提出了一种海洋水色水温扫描仪箝位修正方法及计算机可读介质,以提高水色水温历史遥感数据的利用率并充分挖掘其应用价值。
2、本发明方法的技术方案为一种海洋水色水温扫描仪箝位修正方法,其特征在于:
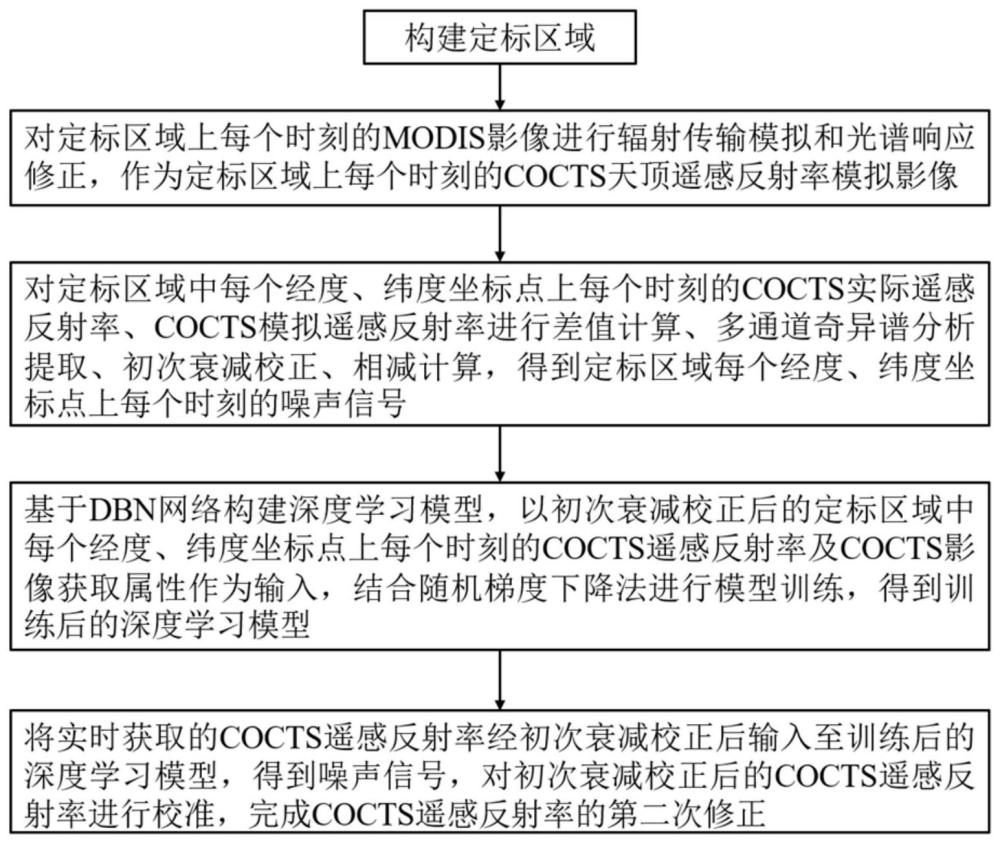
3、构建定标区域;
4、对定标区域上每个时刻的modis影像进行辐射传输模拟和光谱响应修正,作为定标区域上每个时刻的cocts天顶遥感反射率模拟影像;
5、对定标区域中每个经度、纬度坐标点上每个时刻的cocts实际遥感反射率、cocts模拟遥感反射率进行差值计算、多通道奇异谱分析提取、初次衰减校正、相减计算,得到定标区域中每个经度、纬度坐标点上每个时刻的噪声信号;
6、基于dbn网络算法构建深度学习模型,以初次衰减校正后的定标区域中每个经度、纬度坐标点上每个时刻的cocts遥感反射率及cocts影像获取属性作为输入,结合随机梯度下降法进行模型训练,得到训练后的深度学习模型;
7、将实时获取的cocts遥感反射率经初次衰减校正后输入至训练后的深度学习模型,得到噪声信号,对初次衰减校正后的cocts遥感反射率进行校准,完成cocts遥感反射率的第二次修正。
8、本发明的具体步骤如下:
9、步骤1:获取全球海洋区域内每个经度、纬度坐标点上多个时刻的869nm波段气溶胶光学厚度、气溶胶类型参数angstrom系数、多个波段的遥感反射率、490nm波段漫衰减系数、叶绿素a浓度,进一步构建定标区域;
10、步骤2:获取定标区域上多个时刻的cocts影像及同步的modis影像,对定标区域上每个时刻的modis影像进行辐射传输模拟和光谱响应修正,作为定标区域上每个时刻的cocts天顶遥感反射率模拟影像;
11、步骤3:将定标区域中每个经度、纬度坐标点上每个时刻的cocts影像的辐射亮度值转换为定标区域中每个经度、纬度坐标点上每个时刻的cocts实际遥感反射率,对定标区域中每个经度、纬度坐标点上每个时刻的cocts实际遥感反射率及同步的定标区域中每个经度、纬度坐标点上每个时刻的cocts模拟遥感反射率进行差值计算得到差值序列,对差值序列进行多通道奇异谱分析提取,得到差值的趋势项和差值的残差项;结合差值的趋势项对定标区域中每个经度、纬度坐标点上每个时刻的cocts实际遥感反射率进行初次衰减校正,得到初次衰减校正后的定标区域中每个经度、纬度坐标点上每个时刻的cocts遥感反射率,将定标区域中每个经度、纬度坐标点上每个时刻的cocts模拟遥感反射率与初次衰减校正后的定标区域中每个经度、纬度坐标点上每个时刻的cocts遥感反射率进行相减,得到定标区域中每个经度、纬度坐标点上每个时刻的噪声信号;
12、步骤4:基于dbn网络算法构建深度学习模型,以初次衰减校正后的定标区域中每个经度、纬度坐标点上每个时刻的cocts遥感反射率及cocts影像获取属性作为输入,以定标区域中每个经度、纬度坐标点上每个时刻的噪声信号为输出,结合随机梯度下降法进行模型训练,使损失函数最小,得到训练后的深度学习模型;
13、步骤5:将实时获取的cocts遥感反射率经初次衰减校正后输入至训练后的深度学习模型,得噪声信号,将噪声信号添加至初次衰减校正后的cocts遥感反射率,完成cocts遥感反射率的第二次修正。
14、作为优选,步骤1所述构建定标区域,具体如下:
15、步骤1.1:将全球海洋区域内多个经度、纬度坐标点上多个时刻的869nm波段气溶胶光学厚度、angstrom系数、多个波段的遥感反射率、490nm波段漫衰减系数、叶绿素a浓度进行mann–kendall趋势检测,去除具有明显长期单调变化趋势的海洋区域,得到去除单调变化趋势后水体区域;
16、步骤1.2:在去除单调变化趋势后水体区域中所有经度、纬度坐标点中,筛选多个时刻的869nm波段气溶胶光学厚度的均值小于气溶胶阈值、多个时刻的气溶胶类型参数angstrom系数的均值小于angstrom指数阈值、多个时刻的叶绿素a浓度的均值小于叶绿素阈值的经度、纬度坐标点,构建相对清洁稳定水体区域;
17、步骤1.3:根据相对清洁稳定水体区域每个经度、纬度坐标点上多个时刻的869nm波段气溶胶光学厚度、angstrom系数、多个波段的遥感反射率、490nm波段漫衰减系数、叶绿素a浓度,分别计算对应的均值、标准差,进一步计算得到相对清洁稳定水体区域每个经度、纬度坐标点的869nm波段气溶胶光学厚度的变异系数、气溶胶类型参数angstrom系数的变异系数、多个波段的遥感反射率的变异系数、490nm波段漫衰减系数的变异系数、叶绿素a浓度的变异系数,筛选相对清洁稳定水体区域的经度、纬度坐标点的869nm波段气溶胶光学厚度的变异系数、气溶胶类型参数angstrom系数的变异系数、多个波段的遥感反射率的变异系数、490nm波段漫衰减系数的变异系数、叶绿素a浓度的变异系数均小于等于定标阈值的坐标点,构建定标区域;
18、步骤1.3所述分别计算对应的均值、标准差和变异系数,具体如下:
19、相对清洁稳定水体区域每个经度、纬度坐标点的多个时刻的869nm波段气溶胶光学厚度分别进行均值计算、标准差计算,得到相对清洁稳定水体区域每个经度、纬度坐标点的869nm波段气溶胶光学厚度的均值、标准差,标准差与均值相除即可得到变异系数;
20、相对清洁稳定水体区域每个经度、纬度坐标点的多个时刻的气溶胶类型参数angstrom系数分别进行均值计算、标准差计算,得到相对清洁稳定水体区域每个经度、纬度坐标点的气溶胶类型参数angstrom系数的均值、标准差,标准差与均值相除即可得到变异系数;
21、相对清洁稳定水体区域每个经度、纬度坐标点的多个时刻的多个波段的遥感反射率分别进行均值计算、标准差计算,得到相对清洁稳定水体区域每个经度、纬度坐标点的多个波段的遥感反射率的均值、标准差,标准差与均值相除即可得到变异系数;
22、相对清洁稳定水体区域每个经度、纬度坐标点的多个时刻的490nm波段漫衰减系数分别进行均值计算、标准差计算,得到相对清洁稳定水体区域每个经度、纬度坐标点的490nm波段漫衰减系数的均值、标准差,标准差与均值相除即可得到变异系数;
23、相对清洁稳定水体区域每个经度、纬度坐标点的多个时刻的叶绿素a浓度分别进行均值计算、标准差计算,得到相对清洁稳定水体区域每个经度、纬度坐标点的叶绿素a浓度的均值、标准差,标准差与均值相除即可得到变异系数;
24、作为优选,步骤2所述cocts影像天顶辐亮度遥感反射率模拟,具体通过以下方式:
25、步骤2.1:获取同步影像:筛选与定标区域上多个时刻cocts影像拍摄时间同步的modis影像,定标区域上多个时刻的cocts影像包括定标区域内每个经度、纬度坐标点上每个时刻cocts辐射亮度值、cocts影像获取属性;
26、所述cocts影像获取属性由cocts观测几何、cocts当天日地距离、cocts扫描行行数构成;
27、同步modis影像包括定标区域内每个经度、纬度坐标点上每个时刻modis辐射亮度值、modis影像获取属性;
28、modis影像获取属性包括modis观测几何、modis当天日地距离、modis扫描行行数构成;
29、步骤2.2:通过nir/swir算法对定标区域内每个经度、纬度坐标点上每个时刻的modis影像辐射亮度值进行大气校正,得到定标区域中每个经度、纬度坐标点上每个时刻的水体辐亮度和定标区域中每个经度、纬度坐标点上每个时刻的气溶胶光学厚度,根据cocts影像观测几何,在气溶胶查找表中查找到对应观测条件下定标区域中每个经度、纬度坐标点上每个时刻的气溶胶相关辐亮度,在瑞利查找表中查找到定标区域中每个经度、纬度坐标点上每个时刻的瑞利校正后的辐亮度;
30、步骤2.3:计算定标区域中每个经度、纬度坐标点上每个时刻的卫星传感器接收到的天顶辐亮度:
31、l(u,v,k)=lr(u,v,k)+la(u,v,k)+lar(u,v,k)+tlg(u,v,k)+tlwc(u,v,k)+tlw(u,v,k)
32、
33、其中,l(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的卫星传感器接收到的天顶辐亮度,lr(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的瑞利校正后的辐亮度,la(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的气溶胶散射辐亮度,lar(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的来自瑞利和气溶胶之间多次散射辐亮度,lg(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的耀斑辐亮度,lwc(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的白帽辐亮度,t为直射透过率,t为漫射透过率,n1为经度取值的数量,n2表示纬度取值的数量,k表示时刻的数量;
34、将定标区域中每个经度、纬度坐标点上每个时刻的卫星传感器接收到的天顶辐亮度转为定标区域中每个经度、纬度坐标点上每个时刻的modis遥感反射率,以排除观测几何的影响,具体计算如下:
35、
36、其中,d(u,v,k)表示定标区域中经度u、纬度v坐标点上第k时刻的日地距离,f0(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的大气顶层辐照度,θ0(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻获取的太阳天顶角,ρtoa(u,v,k)为定标区域中经度u、纬度v坐标点上第k时刻的modis遥感反射率;
37、步骤2.4:通过光谱匹配因子对定标区域中每个经度、纬度坐标点上每个时刻的modis遥感反射率进行光谱修正,得到定标区域中每个经度、纬度坐标点上每个时刻的模拟的cocts遥感反射率;
38、作为优选,步骤3中所述进行初次衰减校正,具体如下:
39、在定标区域中每个经度、纬度坐标点上每个时刻的cocts实际遥感反射率上添加趋势项得到初次衰减校正后的定标区域中每个经度、纬度坐标点上每个时刻的cocts遥感反射率;
40、作为优选,步骤4所述损失函数,定义如下:
41、
42、
43、其中,为深度学习模型预测的定标区域中经度u、纬度坐标v上第k时刻的噪声信号,y(u,v,k)为初次衰减校正后的定标区域中经度u、纬度坐标v上第k时刻的噪声信号,n1为经度取值的数量,n2表示纬度取值的数量,k表示时刻的数量;
44、本发明还提供了一种计算机可读介质,所述计算机可读介质存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,执行所述海洋水色水温扫描仪箝位修正方法的步骤。
45、本发明的有益效果是:
46、本发明提出的数据修复技术是在稳定场实验基础上完成的,根据全球大气和水体光学参数,筛选出空间上均匀、时间上稳定、气象条件良好的定标场,使得整个数据修复过程更加准确,也为海洋水色卫星辐射定标选址提供参考。
47、本发明利用多通道奇异谱分析方法将数据衰减趋势和其他噪声分解开来,一定程度上区分了传感器辐射衰减的因素,即电子器件退化引起的多个时刻持续衰减和箝位基准漂移引起的不规律噪声,独立研究这两部分可以更好地解释信号衰减机理并进行相应的数据修复。
48、本发明基于cocts与modis匹配数据集,利用深度学习方法训练得到多种影响因素与箝位偏移值之间的非线性关系,实现了不规律噪声的有效预测,进而提高了cocts影像的修复精度。
- 还没有人留言评论。精彩留言会获得点赞!