数据挖掘方法、装置以及车辆与流程
本申请涉及数据挖掘,更具体地,涉及一种数据挖掘方法、装置以及车辆。
背景技术:
1、随着车辆技术的不断发展,自动驾驶开始成为研究热点。在相关方式中,在进行自动驾驶的相关研发时,需要从车辆的环境感知设备(如图像采集设备、激光雷达、毫米波雷达等)中采集大量的原始数据,再将采集到的原始数据传输至云端进行相关研发。但在相关方式中,大量的原始数据的采集,会导致存储成本增加。
技术实现思路
1、鉴于上述问题,本申请提出了一种数据挖掘方法、装置以及车辆,以实现改善上述问题。
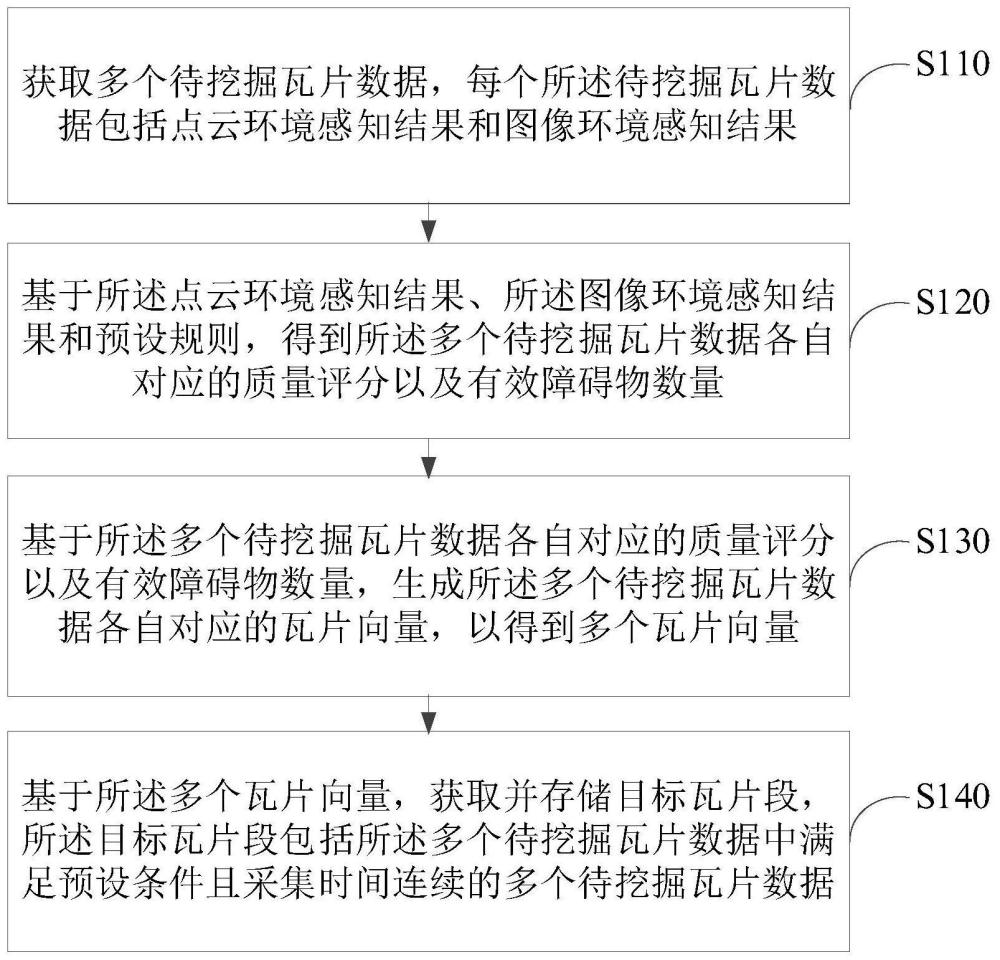
2、第一方面,本申请提供了一种数据挖掘方法,所述方法包括:获取多个待挖掘瓦片数据,每个所述待挖掘瓦片数据包括点云环境感知结果和图像环境感知结果;基于所述点云环境感知结果、所述图像环境感知结果和预设规则,得到所述多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量;基于所述多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量,生成所述多个待挖掘瓦片数据各自对应的瓦片向量,以得到多个瓦片向量;基于所述多个瓦片向量,获取并存储目标瓦片段,所述目标瓦片段包括所述多个待挖掘瓦片数据中满足预设条件且采集时间连续的多个待挖掘瓦片数据。
3、第二方面,本申请提供了一种数据挖掘装置,所述装置包括:数据获取单元,用于获取多个待挖掘瓦片数据,每个所述待挖掘瓦片数据包括点云环境感知结果和图像环境感知结果;评分获取单元,用于基于所述点云环境感知结果、所述图像环境感知结果和预设规则,得到所述多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量;瓦片向量获取单元,用于基于所述多个待挖掘瓦片数据各自对应的质量评分、有效障碍物数量,生成所述多个待挖掘瓦片数据各自对应的瓦片向量,以得到多个瓦片向量;目标瓦片段获取单元,用于基于所述多个瓦片向量,获取并存储目标瓦片段,所述目标瓦片段包括所述多个待挖掘瓦片数据中满足预设条件且采集时间连续的多个待挖掘瓦片数据。
4、第三方面,本申请提供了一种车辆,包括一个或多个处理器以及存储器;一个或多个程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于执行上述的方法。
5、第四方面,本申请提供的一种计算机可读存储介质,所述计算机可读存储介质中存储有程序代码,其中,在所述程序代码运行时执行上述的方法。
6、本申请提供的一种数据挖掘方法、装置、车辆以及存储介质,在获取多个包括点云环境感知结果和图像环境感知结果待挖掘瓦片数据后,基于所述点云环境感知结果、所述图像环境感知结果和预设规则,得到所述多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量;基于所述多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量,生成所述多个待挖掘瓦片数据各自对应的瓦片向量,以得到多个瓦片向量;基于所述多个瓦片向量,获取并存储包括所述多个待挖掘瓦片数据中满足预设条件且采集时间连续的多个待挖掘瓦片数据的目标瓦片段。通过上述方式使得,在获取了多个待挖掘瓦片数据后,可以基于点云环境感知结果、图像环境感知结果和预设规则得到每个待挖掘瓦片数据的质量评分以及有效障碍物数量,并基于每个待挖掘瓦片数据进行质量评分、有效障碍物数量生成多个瓦片向量,以基于多个瓦片向量获取并存储目标瓦片段,从而剔除了多个待挖掘瓦片数据中质量评分和有效障碍物数量不符合预设条件的待挖掘瓦片数据,进而降低了数据的存储成本。
技术特征:
1.一种数据挖掘方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设规则包括第一预设规则和第二预设规则,所述质量评分有多个,所述基于所述点云环境感知结果、所述图像环境感知结果和预设规则,得到所述多个待挖掘瓦片数据各自对应的质量评分,包括:
3.根据权利要求2所述的方法,其特征在于,所述点云环境感知结果包括第一障碍物的多个参数,所述图像环境感知结果包括第二障碍物的多个参数,多个参数包括类别、尺寸、位置和方向中的至少两个,所述基于所述多个待挖掘瓦片数据各自对应的点云环境感知结果、图像环境感知结果、所述第一预设规则和所述第二预设规则,得到所述多个待挖掘瓦片数据各自对应的第一质量评分和第二质量评分,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述多个待挖掘瓦片段中的所有待挖掘瓦片数据包括的第一障碍物的多个参数,得到多个待挖掘瓦片数据各与该多个参数一一对应的多个第一误差,包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求3所述的方法,其特征在于,所述第一障碍物有多个,所述点云环境感知结果还包括第一障碍物的状态标识,该状态标识为创建或者更新或者销毁,所述第二障碍物有多个,所述图像环境感知结果还包括第二障碍物的状态标识,该状态标识为创建或者更新或者销毁,所述基于该多个误差,得到所述多个待挖掘瓦片数据各自对应的第一质量评分,包括:
7.根据权利要求1所述的方法,其特征在于,所述质量评分包括第一质量评分、第二质量评分、第三质量评分,所述有效障碍物数量为所述点云环境感知结果中第一障碍物的数量,所述基于所述多个待挖掘瓦片数据各自对应的质量评分、有效障碍物数量,生成所述多个待挖掘瓦片数据各自对应的瓦片向量,包括:
8.根据权利要求1所述的方法,其特征在于,所述基于所述多个瓦片向量,获取并存储目标瓦片段,包括:
9.根据权利要求8所述的方法,其特征在于,所述质量评分包括第三质量评分,所述基于所述预设条件,从所述参考瓦片数据中获取所述目标瓦片段,并存储所述目标瓦片段,包括:
10.一种数据挖掘装置,其特征在于,所述装置包括:
11.一种车辆,其特征在于,包括一个或多个处理器以及存储器;
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有程序代码,其中,在所述程序代码运行时执行权利要求1-8任一所述的方法。
技术总结
本申请实施例公开了一种数据挖掘方法、装置以及车辆。该方法包括:获取多个待挖掘瓦片数据;基于点云环境感知结果、图像环境感知结果和预设规则,得到多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量;基于多个待挖掘瓦片数据各自对应的质量评分以及有效障碍物数量,生成多个待挖掘瓦片数据各自对应的瓦片向量,以得到多个瓦片向量;基于多个瓦片向量,获取并存储目标瓦片段。通过上述方式使得,可以基于每个待挖掘瓦片数据进行质量评分、有效障碍物数量生成多个瓦片向量,以基于多个瓦片向量获取并存储目标瓦片段,从而剔除了多个待挖掘瓦片数据中质量评分和有效障碍物数量不符合预设条件的待挖掘瓦片数据,进而降低数据的存储成本。
技术研发人员:翁茂楠,张三林,夏锌,孙玲,周浩,吴钦钊
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!