一种基于空间目标检测结果的虚警判别方法
本发明属于航天中的虚警判别,涉及一种基于空间目标检测结果的虚警判别方法。
背景技术:
1、空间目标包括所有的在轨卫星,近年来随着空间目标数量的指数级增长,小口径、大视场望远镜在空间目标观测中的应用越来越广泛(research in astronomy andastrophysics,2022,22(10):105003),空间目标检测技术也正体现出重要性,空间目标检测对于航天安全、航天科学研究、资源管理等领域都具有重要意义,通过对卫星等目标进行检测和跟踪,可以及时发现并监测潜在的安全威胁,如太空垃圾碰撞等,同时有效的空间目标检测可以帮助维护航天器和卫星的运行状态,延长使用寿命,减少资源浪费。
2、虚警是将空间目标检测结果的图像上不是空间目标的点,如恒星、热像素、噪声点等错误地检测为空间目标;虚警是空间目标检测中不容忽视的问题。不恰当的检测算法会导致大量的虚警,给预警系统、安防系统以及相关的人力物力带来不必要的耗费,也极大影响了后续处理的实时性。通过对常规方法检测虚警进行统计分析,发现其中恒星是最大的虚警来源,尤其对于大视场光学系统,恒星分布密集,数量远远多于空间目标,而且恒星的点光斑大且明亮,易将空间目标点掩盖。同时,部分恒星光斑与空间目标大小、形状以及灰度分布相似,易混淆,对空间检测造成严重的干扰。除此以外,复杂的气象条件如云层和月光也影响着图像的质量,导致空间目标检测出现误判。另外在图像采集、传输环节中受到的各种噪声和干扰,比如图片压缩带来的伪影、传感器本身的噪声等往往会被误判为目标,导致虚警的产生(天文光电图像序列空间目标虚警消除技术,2011,38(06):38-44)。
3、因此,对空间目标检测的虚警判别是提高系统感知能力的重要一环。然而在实际的工程运用中,空间目标检测的虚警率仍然居高不下,空间目标检测的结果很难得到实际应用,目前常见的虚警判别的方法有检测前判别和采用特殊的检测算法进行虚警判别后抑制。
4、检测前判别是指在输出空间目标检测结果之前,对原始数据的特点进行研究,通过预处理的手段来获得较好的检测结果,达到虚警判别的目的,这里的预处理包括图像降噪、恒星抑制、航迹关联等操作。采用特殊的检测算法进行虚警判别后抑制,是在空间目标检测的过程中加入虚警抑制算法,对空间目标进行检测,抑制虚警信号的干扰,从而提高检测准确率。
5、检测前判别的缺陷主要在于预处理过程中,为了达到虚警判别的效果,会影响真实的空间目标检测灵敏度,导致一些真实空间目标被漏检,从而影响系统的整体性能,另外在复杂背景环境下,抑制效果表现不佳。
6、而采用特殊的检测算法进行虚警判别后抑制,往往只针对某个特定的场景或空间目标进行优化,并不适用与所有任务场景,另外,加入虚警抑制算法会降低检测速率,存在算法实时性的问题。
技术实现思路
1、为了解决大视场空间目标检测时,如何有效判别检测结果中存在虚警的技术问题,本发明提出了一种基于空间目标检测结果的虚警判别方法,本发明基于望远镜凝视工作模式,采用逆向思路,先得到空间目标的初步检测结果,针对不同观测场景中的虚警特点,分别总结特征并提出针对性的解决方案,从而对空间目标的初步检测结果进行虚警判别,保证真实目标检测灵敏度;避免由于真实目标检测灵敏度低,导致一些真实目标被漏检以及影响系统的整体性能的情况出现;本方案适用于复杂背景下的目标检测虚警抑制场景,方便后续程序对判别出的虚警进行抑制;有效降低了虚警率,减少误报,提高了虚警判别的速度、精度与准确率,进一步确保安全,同时优化资源分配,提高工作效率并节省开支。
2、本发明的目的通过以下技术方案来具体实现:
3、本发明公开了一种基于空间目标检测结果的虚警判别方法,该方法基于望远镜凝视工作模式,该方法包括以下步骤:
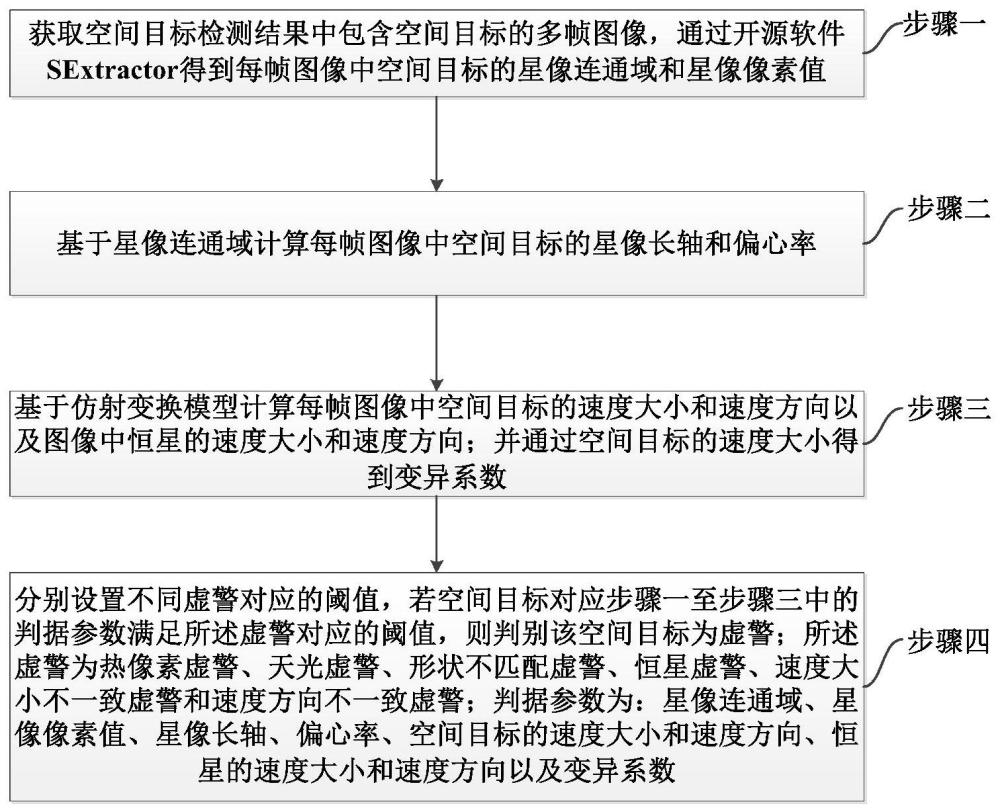
4、步骤一、获取空间目标检测结果中包含空间目标的多帧图像,通过开源软件sextractor得到每帧图像中空间目标的星像连通域和星像像素值;
5、步骤二、基于星像连通域计算每帧图像中空间目标的星像长轴和偏心率;
6、步骤三、基于仿射变换模型计算每帧图像中空间目标的速度大小和速度方向以及图像中恒星的速度大小和速度方向;并通过空间目标的速度大小得到变异系数;
7、步骤四、分别设置不同虚警对应的阈值,若空间目标对应步骤一至步骤三中的判据参数满足所述虚警对应的阈值,则判别该空间目标为虚警;所述虚警为热像素虚警、天光虚警、形状不匹配虚警、恒星虚警、速度大小不一致虚警和速度方向不一致虚警,判据参数为:星像连通域、星像像素值、星像长轴、偏心率、空间目标的速度大小和速度方向、恒星的速度大小和速度方向以及变异系数,判别方法包括:
8、若星像连通域和星像像素值满足热像素阈值,则判断空间目标为虚警,识别该虚警为热像素虚警;
9、若星像像素值满足天光虚警阈值,则判断空间目标为虚警,识别该虚警为天光虚警;
10、若星像连通域、星像长轴和偏心率满足形状不匹配虚警阈值,则判断空间目标为虚警,识别该虚警为形状不匹配虚警;
11、基于恒星的速度大小和速度方向,若空间目标的速度大小和速度方向满足恒星虚警阈值,则判断空间目标为虚警,识别该虚警为恒星虚警;
12、若空间目标的速度大小满足定位误差保护速度阈值,则判断速度大小的变异系数是否满足变异系数虚警阈值,若满足,则判断空间目标为虚警,识别该虚警为速度大小不一致虚警;或判断空间目标的速度方向是否满足速度方向虚警阈值,若满足,则判断空间目标为虚警,识别该虚警为速度方向不一致虚警。
13、步骤二中,基于星像连通域计算每帧图像中的星像长轴和偏心率的计算方法为:
14、其中,
15、d(xθ)=cos2θ·d(x)+sin2θ·d(y)-2sinθcosθ·cov(x,y);
16、d(yθ)=sin2θ·d(x)+cos2θ·d(y)+2sinθcosθ·cov(x,y);
17、其中,e为偏心率;a为星像长轴;b为星像短轴;(xθ,yθ)为星像坐标(x,y)旋转变量θ后的坐标;d(xθ)为xθ的二阶中心矩;d(yθ)为yθ的二阶中心矩;d(x)为基于星像连通域计算的x轴的二阶中心矩,即x轴的方差;d(y)为基于星像连通域计算的y轴的二阶中心矩,即y轴的方差;cov(x,y)为基于星像连通域计算的x轴和y轴的二阶混合矩,即x轴和y轴的协方差。
18、步骤三中,基于仿射变换模型计算每帧图像中空间目标的速度大小和速度方向以及图像中恒星的速度大小和速度方向的计算方法为:
19、选取计算图像;其中,空间目标的速度大小和速度方向的计算图像为获取空间目标检测结果中包含空间目标的每帧图像;恒星的速度大小和速度方向的计算图像为获取空间目标检测结果中包含空间目标的第一帧图像和最后一帧图像,使用开源软件sextractor进行星图匹配,根据星图匹配的结果,分别找到第一帧图像和最后一帧图像中星像像素值最大的三颗公共恒星作为控制点,组成控制三角形,排除三点共线的三角形;
20、基于选取的计算图像进行速度大小和速度方向的计算,计算方法包括:
21、vs=(δx,δy);
22、
23、其中,vs为速度大小;(δx,δy)为仿射变换模型中的坐标平移量;ns为速度方向。
24、步骤三中,通过空间目标的速度大小得到变异系数的计算方法包括:
25、基于速度大小得到速度的标准差以及速度的均值;
26、用速度的标准差除以速度的均值得到变异系数。
27、步骤四的判别方法中,若星像连通域和星像像素值满足热像素阈值,则判断空间目标为虚警,识别该虚警为热像素虚警的判别方法包括:
28、设置热像素阈值为8个像素和k倍;其中,k≥1;
29、若空间目标的星像连通域不小于8个像素,则判断空间目标为真;
30、若空间目标的星像连通域小于8个像素,则对星像连通域中星像像素值的峰值像素与该峰值像素紧邻的8个邻域像素均值进行比较,若峰值像素大于8个邻域像素均值k倍以上,则判断空间目标为虚警,识别该虚警为热像素虚警。
31、步骤四的判别方法中,若星像像素值满足天光虚警阈值,则判断空间目标为虚警,识别该虚警为天光虚警的判别方法包括:
32、天光虚警阈值为基于图像中天光像素值分布特征确定的天光判断阈值和基于空间目标点周围区域的像素值分布特征确定的亮目标判断阈值;
33、根据图像视场大小预设矩形框;所述矩形框以空间目标检测结果中包含空间目标的星像像素值的峰值点为中心;
34、计算矩形框内的星像像素值中位数与全局星像像素值中位数的比值,若比值大于天光判断阈值,则计算星像像素值的峰值点像素值与矩形框内像素中位数比值,若小于亮目标判断阈值,则判断空间目标为虚警,识别该虚警为天光虚警。
35、步骤四的判别方法中,若星像连通域、星像长轴和偏心率满足形状不匹配虚警阈值,则判断空间目标为虚警,识别该虚警为形状不匹配虚警的判别方法包括:
36、设置形状不匹配虚警阈值为连通域一致性判断阈值ds、长轴一致性判断阈值dfw和偏心率一致性判断阈值de;
37、计算空间目标的当前帧与前一帧的星像连通域像素大小比值isoareaf_image、当前帧与前一帧的星像长轴比值flux_radius以及当前帧与前一帧图像中偏心率差的绝对值ellipticity;
38、当相邻两帧中任意一帧空间目标的星像连通域像素大小大于10个像素时,执行同时满足ds≤isoareaf_image<1/ds、dfw≤flux_radius<1/dfw和ellipticity<de时,判断空间目标为真,否则判断形状不匹配,空间目标为虚警,识别该虚警为形状不匹配虚警的判别步骤;
39、当相邻两帧目标的星像连通域像素大小均小于10个像素时,执行同时满足ds≤isoareaf_image<1/ds、dfw≤flux_radius<1/dfw和ellipticity<de时,判断空间目标为真,否则判断形状不匹配,空间目标为虚警,识别该虚警为形状不匹配虚警的判别步骤。
40、步骤四的判别方法中,基于恒星的速度大小和速度方向,若空间目标的速度大小和速度方向满足恒星虚警阈值,则判断空间目标为虚警,识别该虚警为恒星虚警的判别方法包括:
41、恒星虚警阈值为基于恒星的速度方向设置的方向向量夹角阈值、基于geo的速度大小设置的高轨速度保护区和基于恒星的速度大小设置的逆行速度保护区;
42、空间目标的速度方向与恒星的速度方向的方向向量夹角小于方向向量夹角阈值时,
43、若空间目标的速度大小小于高轨保护速度,空间目标落入高轨速度保护区,判断空间目标为真;否则,判断空间目标为虚警,识别该虚警为恒星虚警;或
44、若空间目标的速度大小大于低轨逆行保护速度,空间目标落入逆行速度保护区,判断空间目标为真;否则,判断空间目标为虚警,识别该虚警为恒星虚警;
45、所述高轨保护速度为:vguardgeo=vgeomax*180/pi*3600*delta_t/ar;
46、其中,vguardgeo为高轨保护速度;vgeomax为geo的最大速度;pi为圆周率;delta_t为相邻帧间隔时间,单位为s,ar为望远镜的角分辨率,单位为角秒/像素;
47、所述低轨逆行保护速度为:vguardstar=starmotionmax*2;
48、其中,vguardstar为低轨逆行保护速度;starmotionmax是凝视模式下恒星的最快运动速度,大小为速度大小vs*delta_t/ar。
49、步骤四的判别方法中,若空间目标的速度大小满足定位误差保护速度阈值,则判断速度大小的变异系数是否满足变异系数虚警阈值,若满足,则判断空间目标为虚警,识别该虚警为速度大小不一致虚警的判别方法包括:
50、基于像素分辨率与定位准确度,设置定位误差保护速度阈值speedguard;
51、若空间目标的运动速度大小小于定位误差保护速度阈值speedguard,则判断空间目标为真;否则获取计算的空间目标的速度大小的变异系数speedcofvar,若变异系数小于变异系数虚警阈值,满足速度大小一致性,空间目标为真;否则,判断空间目标为虚警,识别该虚警为速度大小不一致虚警。
52、步骤四的判别方法中,若空间目标的速度大小满足定位误差保护速度阈值,判断空间目标的速度方向是否满足速度方向虚警阈值,若满足,则判断空间目标为虚警,识别该虚警为速度方向不一致虚警的判别方法包括:
53、基于像素分辨率与定位准确度,设置定位误差保护速度阈值speedguard;速度方向虚警阈值为基于目标点在多帧图像中的速度方向一致性设置的方向一致性系数directiondiff;
54、若空间目标的运动速度大小小于定位误差保护速度阈值speedguard,则判断空间目标为真;否则设置方向一致性系数directiondiff,若相邻前后帧速度方向差值大于方向一致性系数directiondiff,则判断为速度方向不一致,则判断空间目标为虚警,识别该虚警为速度方向不一致虚警。
55、本发明公开了一种基于空间目标检测结果的虚警判别方法,通过星像连通域和星像像素值对热像素虚警判别,防止对真正的亮空间目标造成误抑制;通过星像像素值判别天光虚警,防止天光背景上真正的亮空间目标被误抑制;通过对星像连通域、星像长轴和偏心率的计算判别形状不匹配虚警,结合形状特性进行虚警判断;对恒星的运动特性进行总结,得出恒星的运动速度大小和方向,并根据运动特性对恒星虚警进行判别,更加准确快速;根据空间目标的速度大小以及变异系数对速度大小不一致虚警进行判别时,加入定位误差保护速度阈值,防止因质心定位误差而导致空间目标被误抑制;对空间目标的速度方向判断速度方向不一致虚警时,加入高轨速度保护区和逆行速度保护区,防止空间目标被误抑制。
56、本发明所提供的虚警判别方法,适用于复杂背景下的目标检测虚警判别和抑制,虚警判别的效果较好,虚警率由传统的质心跟踪方法的60%降到10%,大大提高了空间目标检测的效果。另外本发明实时性很高,使用处理器intel xeon(r)cpu e5-2630 v4@2.20ghz×40,内存62.8g,硬盘6.2tb,处理10个目标平均用时8.9s。方法比较灵活,可以根据具体情况进行调整和优化。本文阈值设定需要对于不同图像特征进行设定,以达到最佳效果,进一步的可以结合深度学习等优化算法进行参数优化。
- 还没有人留言评论。精彩留言会获得点赞!