一种基于代理模型的空间目标运动估计方法
本发明涉及一种空间目标运动估计方法,属于空间。
背景技术:
1、空间目标运动估计是当前近地空间、地月空间以及深远空间航天活动中的重要任务。空间目标运动估计可以为航天器以及空间碎片、行星、小天体等提供位置信息,而准确快速得估计位置信息对于航天活动中轨迹规划、制导、控制至关重要,在空间碎片清理、地火转移中途修正、地月空间周期轨道保持等航天任务中广泛应用。通常,空间目标运动估计可以通过卡尔曼滤波等方法进行求解。卡尔曼滤波算法包括两部分,一是状态更新,二是测量更新。在状态更新过程中,通常需要进行大量的轨道递推,轨道递推占据大量的计算资源,使得现有的卡尔曼滤波等算法在空间目标运动估计中难以在线应用。针对现有空间目标运动估计方法中,轨道递推耗时巨大的问题,有必要通过训练代理模型,预测轨道递推结果,进而减少算法中轨道递推次数,从而大幅减少计算耗时,实现空间目标实时运动估计。
技术实现思路
1、本发明主要目的是提供一种基于代理模型的空间目标运动估计方法,构建用于轨道递推的代理模型,使用代理模型预测的轨道状态代替轨道递推得到的轨道状态,进而预测空间目标状态均值与协方差,降低空间目标运动估计耗时,提升空间目标运动估计精度。本发明具有定轨精度高,估计误差小、计算耗时短的优点。
2、本发明的目的是通过以下技术方案实现的。
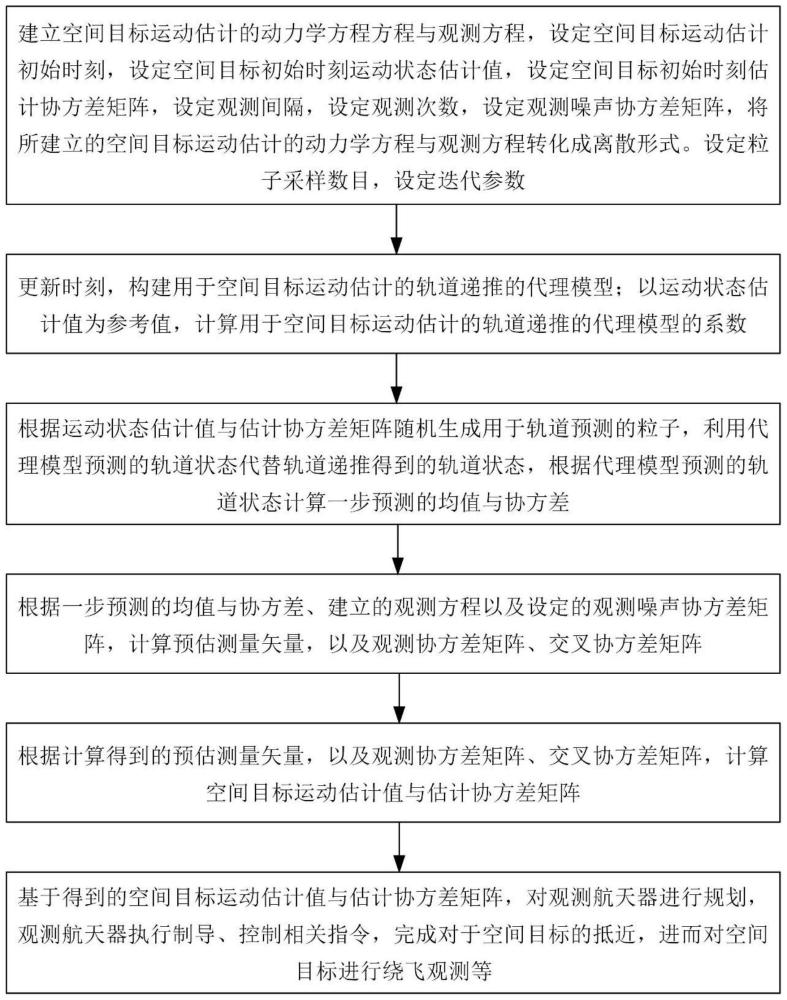
3、本发明公开的一种基于代理模型的空间目标运动估计方法,建立空间目标运动估计的动力学方程方程与观测方程,设定空间目标运动估计初始时刻,设定空间目标初始时刻运动状态估计值,设定空间目标初始时刻估计协方差矩阵,设定观测间隔,设定观测次数,设定观测噪声协方差矩阵,将所建立的空间目标运动估计的动力学方程与观测方程转化成离散形式。设定粒子采样数目,设定迭代参数;更新时刻,构建用于空间目标运动估计的轨道递推的代理模型;以运动状态估计值为参考值,计算用于空间目标运动估计的轨道递推的代理模型的系数;根据运动状态估计值与估计协方差矩阵随机生成用于轨道预测的粒子,利用代理模型预测的轨道状态代替轨道递推得到的轨道状态,根据代理模型预测的轨道状态计算一步预测的均值与协方差;根据一步预测的均值与协方差、建立的观测方程以及设定的观测噪声协方差矩阵,计算预估测量矢量,以及观测协方差矩阵、交叉协方差矩阵;根据计算得到的预估测量矢量,以及观测协方差矩阵、交叉协方差矩阵,计算空间目标运动估计值与估计协方差矩阵;基于得到的空间目标运动估计值与估计协方差矩阵,对观测航天器进行规划,观测航天器执行制导、控制相关指令,实现对于空间目标的抵近,进而实现对空间目标进行绕飞观测。
4、本发明公开的一种基于代理模型的空间目标运动估计方法,包括如下步骤:
5、步骤一:建立空间目标运动估计的动力学方程方程与观测方程,设定空间目标运动估计初始时刻t0,设定空间目标初始时刻运动状态估计值设定空间目标初始时刻估计协方差矩阵设定观测间隔dt,设定观测次数n,设定观测噪声协方差矩阵r,将所建立的空间目标运动估计的动力学方程与观测方程转化成离散形式。设定粒子采样数目n,设定迭代参数k←1。
6、建立空间目标运动估计的动力学方程与观测方程如下:
7、
8、其中x为空间目标在时刻t的运动状态,表示空间目标运动的动力学方程,z=h(x)+v表示空间目标运动估计的观测方程,z为观测矢量,h(x)为测量模型,v为观测噪声。
9、设定空间目标运动估计初始时刻t0,设定空间目标初始时刻运动状态估计值设定空间目标初始时刻估计协方差矩阵设定观测间隔dt,设定观测次数n,设定观测噪声协方差矩阵r。
10、将所建立的空间目标运动估计的动力学方程与观测方程转化成离散形式,有如下表达式:
11、
12、其中下标k与k-1分别表示第k个观测时刻与第k-1个观测时刻对应的状态,xk=f(xk-1)为离散的空间目标运动估计的动力学方程,表达式为:
13、
14、设定粒子采样数目n,设定迭代参数k←1。
15、步骤二:定义tk表示当前时刻,tk-1表示当前时刻的上一时刻,更新时刻tk=tk-1+dt,构建用于空间目标运动估计的轨道递推的代理模型fhdmr(xk-1)。
16、定义tk表示当前时刻,tk-1表示当前时刻的上一时刻,更新时刻tk=tk-1+dt,构建用于空间目标运动估计的轨道递推的代理模型如式(4)所示:
17、
18、其中fhdmr(xk-1)表示空间目标运动估计的动力学方程离散形式的代理模型,与表示输入矢量xk-1的第i个元素和第j个元素,表示代理模型fhdmr(xk-1)的0阶项,表示代理模型fhdmr(xk-1)的1阶项,表示代理模型fhdmr(xk-1)的2阶项。其中代理模型fhdmr(xk-1)的1阶项与代理模型fhdmr(xk-1)的2阶项均为多项式,即有:
19、
20、
21、其中ai表示代理模型fhdmr(xk-1)的1阶项的系数,bij表示代理模型fhdmr(xk-1)的2阶项的系数。
22、步骤三:以运动状态估计值为参考值,根据步骤二构建的轨道递推的代理模型fhdmr(xk-1),计算用于空间目标运动估计的轨道递推的代理模型fhdmr(xk-1)的系数。
23、以运动状态估计值为参考值,构造代理模型fhdmr(xk-1)的0阶项代理模型fhdmr(xk-1)的1阶项与代理模型fhdmr(xk-1)的2阶项如下:
24、
25、
26、
27、其中表示将的第i个元素替换为递推得到的结果,表示将的第i个元素和第j个元素分别替换为和递推得到的结果。通过式(7)-(9)得用于空间目标运动估计的轨道递推的代理模型的系数如下:
28、
29、
30、式(10)与(11)即为用于空间目标运动估计的轨道递推的代理模型的系数。
31、步骤四:根据运动状态估计值与估计协方差矩阵随机生成用于轨道预测的粒子,利用代理模型预测的轨道状态代替轨道递推得到的轨道状态,根据代理模型预测的轨道状态计算一步预测的均值与协方差。
32、根据运动状态估计值与估计协方差矩阵随机生成n个粒子,记为其中下标p表示第p个粒子。利用构建的用于空间目标运动估计的轨道递推的代理模型fhdmr(xk-1)计算第p个粒子对应的输出收集所有粒子的输出,按照式(12)计算一步预测的均值与协方差:
33、
34、
35、其中为一步预测的均值,为一步预测的协方差矩阵。由于使用大量粒子进行一步预测,一步预测的误差小,空间目标运动估计精度高;另外使用构建的用于空间目标运动估计的轨道递推的代理模型fhdmr(xk-1)计算粒子对应的输出,避免大量轨道递推计算,减少空间目标运动估计计算量。
36、步骤五:根据步骤四中一步预测的均值与协方差、步骤一中建立的观测方程、步骤一中设定的观测噪声协方差矩阵r,计算预估测量矢量以及观测协方差矩阵交叉协方差矩阵
37、根据步骤四中一步预测的均值与协方差,以及步骤一中建立的观测方程,计算预估测量矢量,以及观测协方差矩阵、交叉协方差矩阵如下:
38、
39、
40、
41、其中表示预估测量矢量,表示交叉协方差矩阵,表示观测协方差矩阵,hk为观测方程的梯度矩阵,表达式为:
42、
43、步骤六:根据步骤五中计算得到的预估测量矢量以及观测协方差矩阵交叉协方差矩阵计算tk时刻的空间目标运动估计值与估计协方差矩阵
44、根据步骤五中计算得到的预估测量矢量以及观测协方差矩阵交叉协方差矩阵计算tk时刻的空间目标运动估计值与估计协方差矩阵如下:
45、
46、
47、其中zk为tk时刻的空间目标的观测矢量,kk为tk时刻空间目标的卡尔曼增益矩阵,表达式为:
48、
49、步骤七:判断是否满足k≤n-1,如果满足,则令k←k+1,转步骤二;否则输出空间目标运动估计值与估计协方差矩阵即实现空间目标运动估计。
50、还包括步骤八,基于得到的空间目标运动估计值与估计协方差矩阵,对观测航天器进行规划,观测航天器执行规划得到的制导、控制相关指令,实现对于空间目标的抵近,进而实现对空间目标进行绕飞观测。
51、有益效果:
52、1、本发明公开的一种基于代理模型的空间目标运动估计方法,建立空间目标运动估计的动力学方程方程与观测方程,设定空间目标运动估计初始时刻,设定空间目标初始时刻运动状态估计值,设定空间目标初始时刻估计协方差矩阵,设定观测间隔,设定观测次数,设定观测噪声协方差矩阵,将所建立的空间目标运动估计的动力学方程与观测方程转化成离散形式。设定粒子采样数目,设定迭代参数;更新时刻,构建用于空间目标运动估计的轨道递推的代理模型;以运动状态估计值为参考值,计算用于空间目标运动估计的轨道递推的代理模型的系数;根据运动状态估计值与估计协方差矩阵随机生成用于轨道预测的粒子,利用代理模型预测的轨道状态代替轨道递推得到的轨道状态,根据代理模型预测的轨道状态计算一步预测的均值与协方差;根据一步预测的均值与协方差、建立的观测方程以及设定的观测噪声协方差矩阵,计算预估测量矢量,以及观测协方差矩阵、交叉协方差矩阵;根据计算得到的预估测量矢量,以及观测协方差矩阵、交叉协方差矩阵,计算空间目标运动估计值与估计协方差矩阵;基于得到的空间目标运动估计值与估计协方差矩阵,对观测航天器进行规划,观测航天器执行制导、控制相关指令,完成对于空间目标的抵近,进而对空间目标进行绕飞观测。
53、2、本发明公开的一种基于代理模型的空间目标运动估计方法,利用代理模型预测的轨道状态代替轨道递推得到的轨道状态,避免轨道递推的大量计算,大幅降低空间目标运动估计计算量。
54、3、本发明公开的一种基于代理模型的空间目标运动估计方法,根据运动状态估计值与估计协方差矩阵随机生成粒子,根据随机生成粒子计算空间目标运动一步预测的均值与协方差,提高一步预测精度,提高空间目标运动估计精度。
55、4、本发明公开的一种基于代理模型的空间目标运动估计方法,在实现上述3个有益效果的基础上,本发明具有定轨精度高,估计误差小、计算耗时短的优势,降低空间目标运动估计计算耗时,提升空间目标运动估计精度。
- 还没有人留言评论。精彩留言会获得点赞!