一种无人机协同决策准则生成方法、系统、装备和介质
本发明涉及无人机,尤其涉及无人机协同决策准则生成方法、系统、装备和介质。
背景技术:
1、随着无人机技术的快速发展,无人机可以执行各种复杂的任务,但在任务执行过程中,无人机受到任务多样性、环境复杂性和计算能力不足等因素的制约,使其在复杂多变的任务环境下很难进行自主决策。在执行任务期间遇到突发状况时,无人机需要根据实时情况调整自身的任务,但调整自身的任务规划时,需要遵循一定的决策准则,比如任务完成率最大、区域覆盖率最大、任务规划时间最快等。
2、现有的无人机决策准则生成方法主要有基于规则库的规则匹配和基于深度强化学习的规则预测,前者通过对已有的大量历史数据进行分析处理后,手动提取规则并构建规则库,用于后续的规则匹配,这种方法需要手动提取,费时费力,且很难适应动态的态势环境。后者能够以动态仿真的方式进行不同态势的匹配,致力于对未来可能发生的各种情况做出预测,但是其预测的是单一准则,未考虑多个准则间的相关性、优先级,导致生成的决策准则适用性差。
技术实现思路
1、本发明提供了一种无人机协同决策准则生成方法、系统、装备和介质,解决了现有的无人机决策准则生成方法仅能预测单一准则,未考虑多个准则间的相关性、优先级,导致生成的决策准则适用性差的技术问题。
2、本发明提供的一种无人机协同决策准则生成方法,包括:
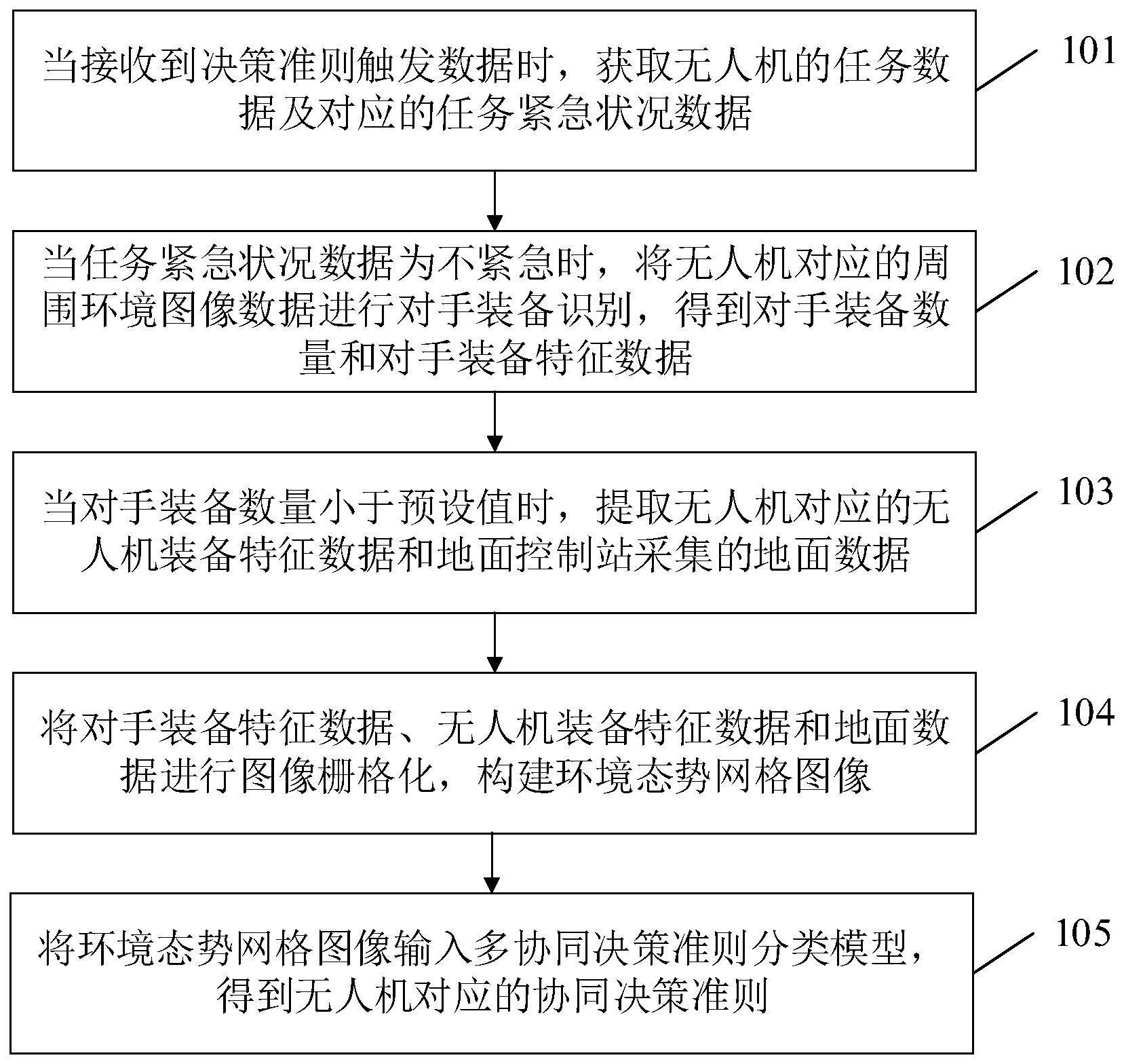
3、当接收到决策准则触发数据时,获取无人机的任务数据及对应的任务紧急状况数据;
4、当所述任务紧急状况数据为不紧急时,将所述无人机对应的周围环境图像数据进行对手装备识别,得到对手装备数量和对手装备特征数据;
5、当所述对手装备数量小于预设值时,提取无人机对应的无人机装备特征数据和地面控制站采集的地面数据;
6、将所述对手装备特征数据、所述无人机装备特征数据和所述地面数据进行图像栅格化,构建环境态势网格图像;
7、将所述环境态势网格图像输入多协同决策准则分类模型,得到所述无人机对应的协同决策准则。
8、可选地,所述获取无人机的任务数据及对应的任务紧急状况数据的步骤,包括:
9、获取无人机对应的无人机授权情况数据;
10、当所述无人机授权情况数据为授权时,将所述无人机的任务数据进行紧急状况判断,得到任务紧急状况数据。
11、可选地,所述将所述对手装备特征数据、所述无人机装备特征数据和所述地面数据进行图像栅格化,构建环境态势网格图像的步骤,包括:
12、将所述对手装备特征数据、所述无人机装备特征数据和所述地面数据进行特征融合,得到初始真实态势网格图像集;
13、将所述初始真实态势网格图像集进行栅格化,得到目标真实态势网格图像集;
14、根据所述目标真实态势网格图像集,采用上采样算法smote生成样本,得到第一虚拟态势网格图像集;
15、根据所述目标真实态势网格图像集,采用信息扩散方法mtd生成样本,得到第二虚拟态势网格图像集;
16、采用所述第一虚拟态势网格图像集和所述第二虚拟态势网格图像集,构建虚拟态势网格图像集;
17、从所述目标真实态势网格图像集和所述虚拟态势网格图像集中选取网格图像样本,构建环境态势网格图像。
18、可选地,所述根据所述目标真实态势网格图像集,采用上采样算法smote生成样本,得到第一虚拟态势网格图像集的步骤,包括:
19、将所述目标真实态势网格图像集中的装备分别作为第一样本生成对象,得到第一网格图像样本集;
20、按照预设选取标准从所述第一网格图像样本集中选取合成样本的根样本;
21、从所述第一网格图像样本集中选取与所述根样本之间欧式距离在预设距离范围内的多个所述第一样本生成对象,得到近邻辅助样本点集;
22、按照预设上采样率从所述近邻辅助样本点集中选取辅助样本点,得到辅助样本点集;
23、将所述辅助样本点集中的辅助样本点分别代入预设样本公式进行样本更新,生成虚拟样本;
24、所述预设样本公式为:
25、xnew=xi+(x′i-xi)×rand(0,1);
26、其中,xnew为第一虚拟态势网格图像;xi为根样本;x′i为辅助样本点;rand(0,1)为0至1之间的随机函数;
27、采用全部所述虚拟样本,构建第一虚拟态势网格图像集。
28、可选地,所述根据所述目标真实态势网格图像集,采用信息扩散方法mtd生成样本,得到第二虚拟态势网格图像集的步骤,包括:
29、将所述目标真实态势网格图像集中的装备分别作为第二样本生成对象,得到第二网格图像样本集;
30、分别选取所述第二网格图像样本集中各装备特征对应的最大值和最小值,得到特征最大值和特征最小值;
31、计算所述特征最大值和所述特征最小值之间的平均值,得到特征均值;
32、计算所述第二网格图像样本集中小于所述特征均值的装备个数,得到第一装备个数;
33、计算所述第二网格图像样本集中大于所述特征均值的装备个数,得到第二装备个数;
34、将所述第一装备个数、所述第二装备个数和特征均值代入预设边界值计算公式进行边界值计算,得到所述装备特征对应的上边界值和下边界值;
35、所述预设边界值计算公式为:
36、
37、
38、
39、
40、
41、其中,ub为上边界值;cl为特征均值;skewu为基于特征均值的右偏度;为第二网格图像样本集对应的装备方差;nu为第二装备个数;lb为下边界值;skewl为基于特征均值的左偏度;nl为第一装备个数;xj为观测值;为均值;n为第二网格图像样本集对应的装备个数;
42、将所述上边界值与所述下边界值代入预设三角隶属函数值计算公式进行计算,得到所述装备特征对应的三角隶属函数值;
43、所述预设三角隶属函数值计算公式为:
44、
45、其中,mf为三角隶属函数值;x′为虚拟样本;lb为下边界值;cl为特征均值;ub为上边界值;
46、将大于预设函数值的三角隶属函数值作为装备虚拟样本;
47、采用全部所述装备虚拟样本,构建第二虚拟态势网格图像集。
48、可选地,所述从所述目标真实态势网格图像集和所述虚拟态势网格图像集中选取网格图像样本,构建环境态势网格图像的步骤,包括:
49、按照预设装备种类选取标准,从所述目标真实态势网格图像集中选取装备种类,得到装备种类;
50、按照所述装备种类和预设选取数量,从所述虚拟态势网格图像集中选取多个补充样本,得到所述装备种类对应的补充样本集并实时统计样本补充次数;
51、当所述样本补充次数小于预设次数阈值时,跳转执行所述按照预设装备种类选取标准,从所述目标真实态势网格图像集中选取装备种类,得到装备种类的步骤;
52、当所述样本补充次数等于预设次数阈值时,采用当前时刻对应的全部补充样本集,构建环境态势网格图像。
53、可选地,所述将所述环境态势网格图像输入多协同决策准则分类模型,得到所述无人机对应的协同决策准则的步骤,包括:
54、将所述环境态势网格图像按照预设标签进行专家标注,得到所述环境态势网格图像对应的类别标签;
55、将所述环境态势网格图像作为输入,将所述类别标签作为输出,对预设多分类神经网络模型进行模型训练,得到多协同决策准则分类模型;
56、将所述环境态势网格图像输入所述多协同决策准则分类模型,得到所述无人机对应的协同决策准则。
57、本发明还提供了一种无人机协同决策准则生成系统,包括:
58、任务紧急状况数据获取模块,用于当接收到决策准则触发数据时,获取无人机的任务数据及对应的任务紧急状况数据;
59、对手装备数量和对手装备特征数据得到模块,用于当所述任务紧急状况数据为不紧急时,将所述无人机对应的周围环境图像数据进行对手装备识别,得到对手装备数量和对手装备特征数据;
60、无人机装备特征数据和地面数据提取模块,用于当所述对手装备数量小于预设值时,提取无人机对应的无人机装备特征数据和地面控制站采集的地面数据;
61、环境态势网格图像得到模块,用于将所述对手装备特征数据、所述无人机装备特征数据和所述地面数据进行图像栅格化,构建环境态势网格图像;
62、协同决策准则得到模块,用于将所述环境态势网格图像输入多协同决策准则分类模型,得到所述无人机对应的协同决策准则。
63、本发明还提供了一种电子装备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行实现如上述任一项无人机协同决策准则生成方法的步骤。
64、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现如上述任一项无人机协同决策准则生成方法。
65、从以上技术方案可以看出,本发明具有以下优点:
66、本发明在无人机飞行过程中,综合考虑无人机执行任务的紧急情况、评估出的计算量大小等因素,在执行任务不紧急且评估的计算量小的前提下,能够科学、准确地生成符合无人机在当前环境态势下的协同决策准则。其次,在生成协同决策准则的过程中,融合地面控制站发送地面数据和无人机采集数据,有效结合了地面全局信息和无人机局部信息。最后,采用多协同决策准则分类模型生成不同环境态势下的决策准则,实现了动态环境态势与决策准则的一对多匹配,致力于对未来可能发生的各种情况做出预测,使得无人机能够适应于复杂多变的环境。此外,在训练多协同决策准则分类模型的过程中,针对训练样本不足的问题,本发明提出使用不考虑样本标签的smote和不考虑样本标签的mtd方法生成虚拟态势网格图像集,有效解决了样本数据不足导致的模型过拟合问题。
- 还没有人留言评论。精彩留言会获得点赞!