一种基于影像采集系统的智能工程监理方法、系统及设备与流程
本技术涉及工程监理,尤其是涉及一种基于影像采集系统的智能工程监理方法、系统及设备。
背景技术:
1、工程监理是指具有相关资质的监理单位受甲方的委托,依据国家批准的工程项目建设文件、有关工程建设的法律、法规和工程建设监理合同及其他工程建设合同,代表甲方对乙方的工程建设实施监控的一种专业化服务活动。
2、工程监理的内容包括施工现场的施工进度、施工质量、施工安全等,其中,施工安全是工程监理中至关重要的方面,这关系到施工人员的人身安全。
3、针对施工安全方面常见的高空坠落问题,相关技术在发生安全问题之后对施工现场进行排查,确认事故原因,但这种方法只能进行溯源和追责,不能在事故发生之前进行预警。
技术实现思路
1、为了解决现有技术不能对施工现场的安全隐患进行预警的问题,本技术提供一种基于影像采集系统的智能工程监理方法、系统及设备。
2、第一方面,本技术提供了一种智能工程监理方法,采用如下技术方案:
3、一种基于影像采集系统的智能工程监理方法,包括:
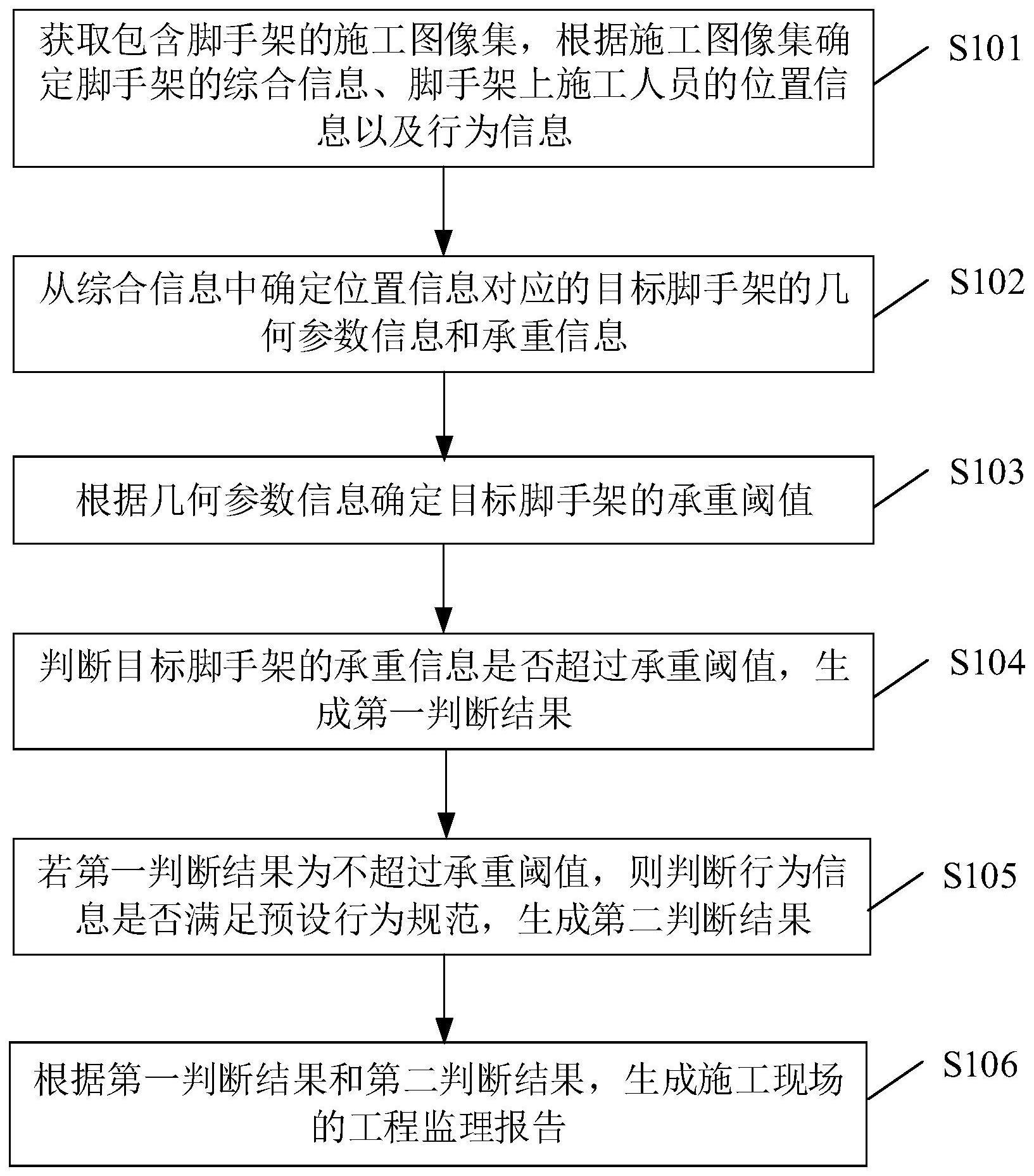
4、获取包含脚手架的施工图像集,根据所述施工图像集确定所述脚手架的综合信息、所述脚手架上施工人员的位置信息以及行为信息;
5、从所述综合信息中确定所述位置信息对应的目标脚手架的几何参数信息和承重信息;
6、根据所述几何参数信息确定所述目标脚手架的承重阈值;
7、判断所述目标脚手架的承重信息是否超过所述承重阈值,生成第一判断结果;
8、若所述第一判断结果为不超过所述承重阈值,则判断所述行为信息是否满足预设行为规范,生成第二判断结果;
9、根据所述第一判断结果和所述第二判断结果,生成施工现场的工程监理报告。
10、通过采用上述技术方案,获取包含脚手架的施工图像集,根据施工图像集确定脚手架的综合信息、施工人员的位置信息以及行为信息,以通过各种信息对施工安全隐患进行排查;位置信息对应的目标脚手架为施工人员所处的施工区域,从综合信息中确定目标脚手架的几何参数信息和承重信息,能够根据几何参数信息和承重信息判断目标脚手架存在的安全隐患;几何参数信息表示目标脚手架的构造,脚手架的构造关系到脚手架的承重能力,根据几何参数信息能精准确定目标脚手架的承重阈值;判断目标脚手架的承重信息是否超过承重阈值,生成第一判断结果,若超过,表示目标脚手架不安全;若不超过,表示目标脚手架安全,则判断施工人员行为信息是否满足预设行为规范,能够进一步判定目标脚手架上施工人员的安全性;根据第一判断结果和第二判断结果,能够得到包含施工安全隐患的工程监理报告,本技术能够对施工现场的安全隐患进行预警,通过工程监理报告对施工现场进行针对性整改,能够提高后续施工现场内施工人员的施工安全。
11、本技术在一较佳示例中可以进一步配置为:所述施工图像集包括多个施工图像;
12、根据所述施工图像集确定所述脚手架上施工人员的位置信息和行为信息,包括:
13、根据所述施工图像集,获取目标施工人员对应的多个目标施工图像以及所述多个目标施工图像各自对应的采集时刻,其中,目标施工人员为施工人员中任一个;
14、根据所述目标施工人员对应的多个目标施工图像以及所述多个目标施工图像各自对应的采集时刻,确定所述目标施工人员在所述脚手架上的多个位置信息和防护设备佩戴信息,其中,所述位置信息包括:位置以及时刻;
15、根据所述目标施工人员在所述脚手架上的多个位置信息,生成所述目标施工人员在所述脚手架上的运动轨迹;
16、根据所述运动轨迹和所述防护设备佩戴信息,生成所述目标施工人员的行为信息。
17、通过采用上述技术方案,根据目标施工人员对应的多个目标施工图像以及多个目标施工图像各自对应的采集时刻,能够确定每一目标施图像中目标施工人员的位置信息和防护设备佩戴信息,根据多个位置信息能精准确定目标施工人员在脚手架上的运动轨迹,根据运动轨迹能够判断目标施人员在脚手架上的移动情况是否合规,根据防护设佩戴信息能够确定目标施工人员是否按规定佩戴安全设备,能够确定目标施工人员在脚手架上的安全性。
18、本技术在一较佳示例中可以进一步配置为:根据所述目标施工人员对应的多个目标施工图像,确定所述目标施工人员在所述脚手架上的防护设备佩戴信息,包括:
19、对每一目标施工图像进行识别,确定每一目标施工图像中所述目标施工人员的预设身体部位区域,其中,所述预设身体部位区域包括头部、背部和脚部;
20、对每一预设身体部位区域进行特征提取,将提取到的特征与所述预设身体部位区域对应的防护设备的特征进行匹配,若匹配成功,则判定所述预设身体部位佩戴有对应的防护设备;根据目标施工人员的每一预设身体部位区域的防护设备的特征识别结果,生成所述目标施工人员在所述脚手架上的防护设备佩戴信息。
21、通过采用上述技术方案,识别每一目标施工图像中目标施工人员的预设身体部位区域是否佩戴对应的防护设备,能够根据防护设备的图像特征识别结果,生成目标施工人员的防护设备佩戴信息,以确定目标施工人员是否按规定进行安全防护,能够确定目标施工人员的安全性。
22、本技术在一较佳示例中可以进一步配置为:所述几何参数信息包括所述目标脚手架中每一杆的尺寸信息和弯曲程度,
23、所述方法还包括:
24、判断所述目标脚手架中目标杆的尺寸信息是否满足预设尺寸规范,得到第三判断结果,其中,所述目标杆为所述目标脚手架中任一杆;
25、判断所述目标杆的弯曲程度是否超过预设弯曲程度阈值,得到第四判断结果;
26、相应的,所述根据所述第一判断结果和所述第二判断结果,生成施工现场的工程监理报告,包括:
27、根据所述第一判断结果、所述第二判断结果、所述第三判断结果和所述第四判断结果,生成施工现场的工程监理报告。
28、通过采用上述技术方案,判断目标杆的尺寸信息是否满足预设尺寸规范,以及弯曲程度是否超过预设弯曲程度阈值,能够确定目标脚手架的尺寸和弯曲程度是否合规,以确定目标脚手架的安全性。
29、本技术在一较佳示例中可以进一步配置为:所述尺寸信息包括长度和直径,判断所述目标脚手架中目标杆的尺寸信息是否满足预设尺寸规范,包括:
30、判断所述目标脚手架中目标杆的长度是否满足预设长度规范;
31、判断所述目标脚手架中目标杆的直径是否满足预设直径规范;
32、若所述目标杆的长度不满足所述预设长度规范,或,所述目标杆的直径不满足所述预设直径规范,则判定所述目标脚手架中目标杆的尺寸信息不满足预设尺寸规范。
33、通过采用上述技术方案,判断目标脚手架中每一杆的长度和直径是否合规,能够确定目标脚手架是否合规,以通过目标脚手架确定施工人员的安全性。
34、本技术在一较佳示例中可以进一步配置为:根据所述几何参数信息确定所述目标脚手架的承重阈值,包括:
35、根据几何参数信息建立目标脚手架的三维模型;
36、确定所述三维模型的仿真参数,其中,所述仿真参数包括仿真时间以及仿真环境;
37、对所述三维模型添加约束和载荷;
38、根据所述仿真参数、所述约束和载荷,对所述三维模型进行仿真,得到所述三维模型的形变情况;
39、根据预设载荷差值对所述载荷进行更新,根据所述仿真参数、所述约束和更新后的载荷,对所述三维模型进行迭代仿真,直到所述三维模型的形变情况超过预设形变阈值;
40、根据更新后的载荷,确定所述目标脚手架的承重阈值。
41、通过采用上述技术方案,根据几何参数信息构建目标脚手架的三维模型,通过仿真能精准模拟出真实施工现场中目标脚手架的受力情况,通过分析目标脚手架的形变情况,能够精准确定目标脚手架的承重阈值,以通过称重阈值判断目标脚手架的承重信息是否超重。
42、第二方面,本技术提供一种基于影像采集系统的智能工程监理系统,采用如下的技术方案:
43、一种基于影像采集系统的智能工程监理系统,包括:
44、获取模块,用于获取包含脚手架的施工图像集,根据所述施工图像集确定所述脚手架的综合信息、所述脚手架上施工人员的位置信息以及行为信息;
45、第一确定模块,用于从所述综合信息中确定所述位置信息对应的目标脚手架的几何参数信息和承重信息;
46、第二确定模块,用于根据所述几何参数信息确定所述目标脚手架的承重阈值;
47、第一判断模块,用于判断所述目标脚手架的承重信息是否超过所述承重阈值,生成第一判断结果;
48、第二判断模块,用于若所述第一判断结果为不超过所述承重阈值,则判断所述行为信息是否满足预设行为规范,生成第二判断结果;
49、生成模块,用于根据所述第一判断结果和所述第二判断结果,生成施工现场的工程监理报告。
50、本技术在一较佳示例中可以进一步配置为:所述施工图像集包括多个施工图像;
51、所述获取模块,在执行根据所述施工图像集确定所述脚手架上施工人员的位置信息和行为信息时,具体用于:
52、根据所述施工图像集,获取目标施工人员对应的多个目标施工图像以及所述多个目标施工图像各自对应的采集时刻,其中,目标施工人员为施工人员中任一个;
53、根据所述目标施工人员对应的多个目标施工图像以及所述多个目标施工图像各自对应的采集时刻,确定所述目标施工人员在所述脚手架上的多个位置信息和防护设备佩戴信息,其中,所述位置信息包括:位置以及时刻;
54、根据所述目标施工人员在所述脚手架上的多个位置信息,生成所述目标施工人员在所述脚手架上的运动轨迹;
55、根据所述运动轨迹和所述防护设备佩戴信息,生成所述目标施工人员的行为信息。
56、第三方面,本技术提供一种电子设备,采用如下的技术方案:
57、一个或多个处理器;
58、存储器;
59、一个或多个应用程序,其中所述一个或多个应用程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于:执行如第一方面任一项所述的基于影像采集系统的智能工程监理方法。
60、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
61、一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令所述计算机执行如第一方面任一项所述的基于影像采集系统的智能工程监理方法。
62、综上所述,本技术包括以下有益技术效果:
63、本技术通过获取包含脚手架的施工图像集,根据施工图像集确定脚手架的综合信息、施工人员的位置信息以及行为信息,以通过各种信息对施工安全隐患进行排查;位置信息对应的目标脚手架为施工人员所处的施工区域,从综合信息中确定目标脚手架的几何参数信息和承重信息,能够根据几何参数信息和承重信息判断目标脚手架存在的安全隐患;几何参数信息表示目标脚手架的构造,脚手架的构造关系到脚手架的承重能力,根据几何参数信息能精准确定目标脚手架的承重阈值;判断目标脚手架的承重信息是否超过承重阈值,生成第一判断结果,若超过,表示目标脚手架不安全;若不超过,表示目标脚手架安全,则判断施工人员行为信息是否满足预设行为规范,能够进一步判定目标脚手架上施工人员的安全性;根据第一判断结果和第二判断结果,能够得到包含施工安全隐患的工程监理报告,本技术能够对施工现场的安全隐患进行预警,通过工程监理报告对施工现场进行针对性整改,能够提高后续施工现场内施工人员的施工安全。
- 还没有人留言评论。精彩留言会获得点赞!