跌倒行为检测方法、装置、设备及计算机可读存储介质与流程
本技术涉及机器视觉,尤其涉及跌倒行为检测方法、装置、设备及计算机可读存储介质。
背景技术:
1、近年来,随着行为识别技术的不断发展,作为视觉场景中热度较高的跌倒行为识别也受到广泛的关注。
2、目前,相关技术中大部分的跌倒行为识别算法主要基于一个空间点或一段时间区间进行瞬时的异常行为识别,但是在一些以异常行为事件全过程为目标的场景下,这类算法并不能达到目标需求,这部分场景希望算法能够连续不间断的识别出目标行为,进一步得到事件的关键状态信息,这就要求算法模型能够时刻维持检出能力在基准线上,而目前很少有模型能够保证在任何背景下面对各种形态的跌倒姿态都能够维持高准确率的识别。
技术实现思路
1、本技术的主要目的在于提供一种跌倒行为检测方法、装置、设备及计算机可读存储介质,旨在解决如何在模型准确率有限的条件下对跌倒事件中的关键行为状态进行识别,进而识别整个跌倒事件过程的技术问题。
2、为实现上述目的,本技术提供一种跌倒行为检测方法,所述跌倒行为检测方法包括:
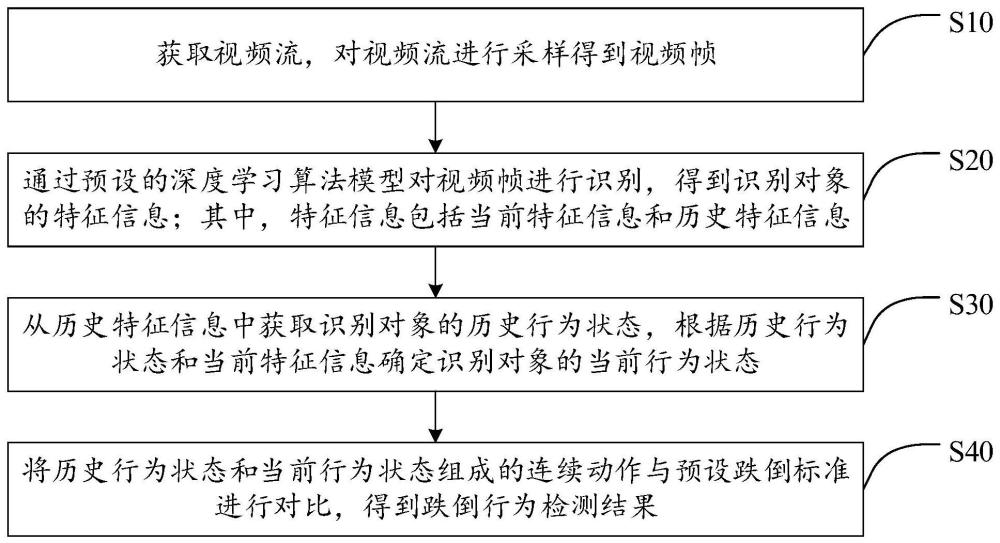
3、获取视频流,对所述视频流进行采样得到视频帧;
4、通过预设的深度学习算法模型对所述视频帧进行识别,得到识别对象的特征信息;其中,所述特征信息包括历史特征信息和当前特征信息;
5、从所述历史特征信息中获取所述识别对象的历史行为状态,根据所述历史行为状态和所述当前特征信息确定所述识别对象的当前行为状态;
6、将所述历史行为状态和所述当前行为状态组成的连续动作与预设跌倒标准进行对比,得到跌倒行为检测结果。
7、可选地,所述预设的深度学习算法模型为人体姿势估计模型;所述特征信息包括:坐标框、行为类别和骨架序列;所述通过预设的深度学习算法模型对所述视频帧进行识别,得到识别对象的特征信息的步骤,包括:
8、通过人体姿势估计模型对所述视频帧进行识别,得到识别对象的坐标框、行为类别和骨架序列。
9、可选地,所述预设的深度学习算法模型包括:目标检测算法和骨架识别算法;所述特征信息包括:坐标框、行为类别和骨架序列;所述通过预设的深度学习算法模型对所述视频帧进行识别,得到识别对象的特征信息的步骤,包括:
10、通过目标检测算法对所述视频帧进行识别,得到识别对象的坐标框和行为类别;
11、基于所述坐标框从所述视频帧中剪裁出包括所述识别对象的坐标区域;
12、通过骨架识别算法对所述坐标区域进行识别,得到所述识别对象的骨架序列。
13、可选地,所述坐标框包括:当前坐标框和历史坐标框;所述行为类别包括:当前行为类别和历史行为类别;在所述从所述历史特征信息中获取所述识别对象的历史行为状态的步骤之前,所述跌倒行为检测方法还包括:
14、将与当前坐标框重叠度最大的历史坐标框映射至同一个所述识别对象;
15、所述从所述历史特征信息中获取所述识别对象的历史行为状态的步骤,包括:
16、从所述历史特征信息中获取与所述历史坐标框对应的历史行为类别,将所述历史行为类别作为所述识别对象的历史行为状态。
17、可选地,所述骨架序列包括:当前骨架序列和历史骨架序列;在所述将与当前坐标框重叠度最大的历史坐标框映射至同一个所述识别对象的步骤之后,所述跌倒行为检测方法还包括:
18、从所述历史特征信息中获取与所述历史坐标框对应的历史骨架序列作为所述识别对象的历史骨架序列;
19、根据所述识别对象的当前骨架序列和历史骨架序列确定所述识别对象的时域腿部偏移距离序列。
20、可选地,所述根据所述当前骨架序列和所述历史骨架序列确定所述识别对象的时域腿部偏移距离序列的步骤,包括:
21、根据所述当前骨架序列中的头部坐标确定标准点坐标;
22、将所述标准点坐标与所述当前骨架序列中的腿部坐标序列的矢量差作为当前腿部偏移距离序列;
23、将所述当前腿部偏移距离序列与所述历史骨架序列中的历史腿部偏移距离序列的差的平方和作为所述识别对象的时域腿部偏移距离序列。
24、可选地,所述当前行为类别和所述历史行为状态包括:下蹲状态、跌倒状态和站立状态;所述根据所述历史行为状态和所述当前特征信息确定所述识别对象的当前行为状态的步骤,包括:
25、在所述当前行为类别为下蹲状态的情况下,根据所述历史行为状态将所述当前行为类别转换为跌倒状态或站立状态;
26、在所述当前行为类别为跌倒状态的情况下,根据所述历史行为状态中站立状态的连续出现频率确定所述识别对象的当前行为状态;
27、在所述当前行为类别为站立状态的情况下,根据所述历史行为状态中跌倒状态的连续出现频率以及所述时域腿部偏移距离序列确定所述识别对象的当前行为状态。
28、此外,为实现上述目的,本技术还提供一种跌倒行为检测装置,所述跌倒行为检测装置包括:
29、获取模块,所述获取模块用于获取视频流,对所述视频流进行采样得到视频帧;
30、识别模块,所述识别模块用于通过预设的深度学习算法模型对所述视频帧进行识别,得到识别对象的特征信息;其中,所述特征信息包括历史特征信息和当前特征信息;
31、计算模块,所述计算模块用于从所述历史特征信息中获取所述识别对象的历史行为状态,根据所述历史行为状态和所述当前特征信息确定所述识别对象的当前行为状态;
32、分析模块,所述分析模块用于将所述历史行为状态和所述当前行为状态组成的连续动作与预设跌倒标准进行对比,得到跌倒行为检测结果。
33、此外,为实现上述目的,本技术还提供一种跌倒行为检测设备,所述跌倒行为检测设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的跌倒行为检测方法的步骤。
34、此外,为实现上述目的,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的跌倒行为检测方法的步骤。
35、本技术提出一种跌倒行为检测方法、装置、设备及计算机可读存储介质,在所述跌倒行为检测方法中,先获取视频流,对所述视频流进行采样得到视频帧;再通过预设的深度学习算法模型对所述视频帧进行识别,得到识别对象的特征信息;其中,所述特征信息包括历史特征信息和当前特征信息;之后,从所述历史特征信息中获取所述识别对象的历史行为状态,根据所述历史行为状态和所述当前特征信息确定所述识别对象的当前行为状态;最后将所述历史行为状态和所述当前行为状态组成的连续动作与预设跌倒标准进行对比,得到跌倒行为检测结果。本技术通过对目标场景内的各视频帧进行识别,得到连续视频帧中识别对象的特征信息,达到连续不间断地识别出目标行为的目的,通过历史行为状态和当前特征信息联合计算,能够更加准确地获取识别对象的当前行为状态,再结合历史行为状态和当前行为状态组成的连续动作准确获知跌倒事件的关键状态,进而识别出整个跌倒事件过程,实现了在模型准确率有限的条件下对跌倒事件中的关键行为状态进行识别,进而识别整个跌倒事件过程,克服了相关技术中的技术缺陷。
- 还没有人留言评论。精彩留言会获得点赞!