一种基于AR技术的智能教学方法及装置与流程
本发明涉及数据处理,特别是涉及一种基于ar技术的智能教学方法及装置。
背景技术:
1、增强现实(augmented reality,简称 ar),是一种实时地计算摄影机影像的位置及角度并加上相应图像的技术,是一种将真实世界信息和虚拟世界信息“无缝”集成的新技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动。因此,将ar技术应用于日常教学中,可以有效地提高教学效果,当前的球类运动深受广大体育爱好者的喜爱,同时球类运动技术要求细腻、速度快、变化多样等优势,促使其在学校中非常流行,也是学校体育教学的重要内容。体育训练比赛过程往往包含了海量的实时数据,通过对这些数据的挖掘分析,可以高效快速的掌握实战技巧,并以此制定针对性训练计划和作战策略。
2、在体育训练上,为了更好的实施训练计划和作战策略,通常采用发球机让球手可以长时间的训练,而不需要发球员来投掷球,例如,羽毛球发球机、网球发球机等,然而传统的发球机却完全依赖于教练等专业人士的人工处理,基于现场人工调节,这就导致任务重,维度低,无法准确的对发球机的发球数据进行设定以及处理,严重降低了教学质量和教学效率。
3、因此,如何提供一种可以基于ar技术的智能教学方法及装置,是目前有待解决的技术问题。
技术实现思路
1、本发明实施例提供一种基于ar技术的智能教学方法及装置,用以解决现有技术中无法根据训练数据对发球机进行智能化控制,无法提高教学质量的技术问题。
2、为了实现上述目的,本发明提供了一种基于ar技术的智能教学方法,所述方法包括:
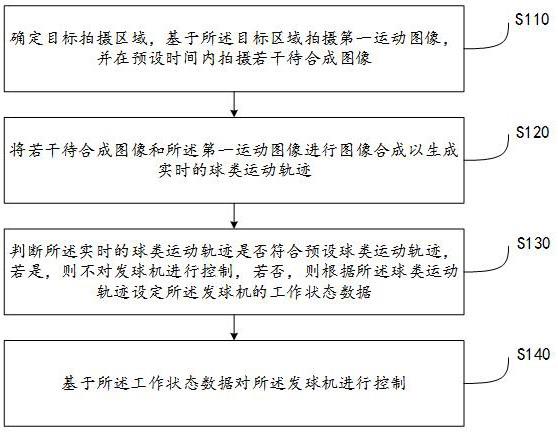
3、确定目标拍摄区域,基于所述目标拍摄区域拍摄第一运动图像,并在预设时间内拍摄若干待合成图像;
4、将若干待合成图像和所述第一运动图像进行图像合成以生成实时的球类运动轨迹;
5、判断所述实时的球类运动轨迹是否符合预设球类运动轨迹,
6、若是,则不对发球机进行控制;
7、若否,则根据所述球类运动轨迹设定所述发球机的工作状态数据;
8、基于所述工作状态数据对所述发球机进行控制。
9、在其中一个实施例中,在将若干待合成图像和所述第一运动图像进行图像合成以生成实时的球类运动轨迹时,包括:
10、基于拍摄时间节点对若干待合成图像进行排序,并生成第一图像集合;
11、依次对所述第一图像集合中的待合成图像进行图像分析,获取所述第一图像集合中的终止图像;
12、根据所述终止图像和所述终止图像之前的待合成图像生成第二图像集合;
13、根据所述终止图像之后的待合成图像生成第三图像集合;
14、删除所述第三图像集合,并根据所述第二图像集合和所述第一运动图像生成所述实时的球类运动轨迹。
15、在其中一个实施例中,在根据所述球类运动轨迹和所述预设球类运动轨迹设定所述发球机的工作状态数据时,包括:
16、将所述实时的球类运动轨迹映射到预先构建的坐标图,得到实时球类运动轨迹折线图;
17、基于所述实时球类运动轨迹折线图确定所述实时的球类运动轨迹的最高点,并确定所述最高点对应的运动数值a;
18、根据所述运动数值a设定所述发球机的发球角度和发球速度。
19、在其中一个实施例中,在根据所述运动数值a设定所述发球机的发球角度和发球速度时,包括:
20、预设运动数值矩阵b,设定b(b1,b2,b3,b4),其中,b1为第一预设运动数值,b2为第二预设运动数值,b3为第三预设运动数值,b4为第四预设运动数值,且b1<b2<b3<b4;
21、预设发球机的发球角度矩阵c,设定c(c1,c2,c3,c4,c5),其中,c1为第一预设发球角度,c2为第二预设发球角度,c3为第三预设发球角度,c4为第四预设发球角度,c5为第五预设发球角度,且c1<c2<c3<c4<c5;
22、预设发球机的发球速度矩阵d,设定d(d1,d2,d3,d4,d5),其中,d1为第一预设发球速度,d2为第二预设发球速度,d3为第三预设发球速度,d4为第四预设发球速度,d5为第五预设发球速度,且d1<d2<d3<d4<d5;
23、根据所述运动数值a与各预设运动数值之间的关系设定所述发球机的发球角度和发球速度:
24、当a<b1时,选定所述第一预设发球角度c1作为所述发球机的发球角度,选定所述第一预设发球速度d1作为所述发球机的发球速度;
25、当b1≤a<b2时,选定所述第二预设发球角度c2作为所述发球机的发球角度,选定所述第二预设发球速度d2作为所述发球机的发球速度;
26、当b2≤a<b3时,选定所述第三预设发球角度c3作为所述发球机的发球角度,选定所述第三预设发球速度d3作为所述发球机的发球速度;
27、当b3≤a<b4时,选定所述第四预设发球角度c4作为所述发球机的发球角度,选定所述第四预设发球速度d4作为所述发球机的发球速度;
28、当b4≤a时,选定所述第五预设发球角度c5作为所述发球机的发球角度,选定所述第五预设发球速度d5作为所述发球机的发球速度。
29、在其中一个实施例中,根据所述运动数值a设定所述发球机的发球角度和发球速度之后,还包括:
30、确定所述实时球类运动轨迹折线图上的第一端点和第二端点,并确定所述第一端点和所述第二端点之间的距离值d;
31、根据所述距离值d对所述发球机的发球角度和发球速度进行修正。
32、在其中一个实施例中,根据所述距离值d对所述发球机的发球角度和发球速度进行修正时,包括:
33、预设距离值矩阵g,设定g(g1,g2,g3,g4),其中,g1为第一预设距离值,g2为第二预设距离值,g3为第三预设距离值,g4为第四预设距离值,且g1<g2<g3<g4;
34、预设发球机的发球角度修正系数矩阵h,设定h(h1,h2,h3,h4,h5),其中,h1为第一预设发球角度修正系数,h2为第二预设发球角度修正系数,h3为第三预设发球角度修正系数,h4为第四预设发球角度修正系数,h5为第五预设发球角度修正系数,且0.8<h1<h2<h3<h4<h5<1.2;
35、预设发球机的发球速度修正系数矩阵y,设定y(y1,y2,y3,y4,y5),其中,y1为第一预设发球速度修正系数,y2为第二预设发球速度修正系数,y3为第三预设发球速度修正系数,y4为第四预设发球速度修正系数,y5为第五预设发球速度修正系数,且0.8<y1<y2<y3<y4<y5<1.2;
36、将所述发球机的发球角度和发球速度分别设定为第i预设发球角度ci和第i预设发球速度di时,i=1,2,3,4,5,根据所述距离值d与各预设距离值之间的关系对所述发球机的发球角度和发球速度进行修正:
37、当d<g1时,选定所述第一预设发球角度修正系数h1对所述第i预设发球角度ci进行修正,修正后的发球机的发球角度为ci×h1,选定所述第一预设发球速度修正系数y1对所述第i预设发球速度di进行修正,修正后的发球机的发球速度为di×y1;
38、当g1≤d<g2时,选定所述第二预设发球角度修正系数h2对所述第i预设发球角度ci进行修正,修正后的发球机的发球角度为ci×h2,选定所述第二预设发球速度修正系数y2对所述第i预设发球速度di进行修正,修正后的发球机的发球速度为di×y2;
39、当g2≤d<g3时,选定所述第三预设发球角度修正系数h3对所述第i预设发球角度ci进行修正,修正后的发球机的发球角度为ci×h3,选定所述第三预设发球速度修正系数y3对所述第i预设发球速度di进行修正,修正后的发球机的发球速度为di×y3;
40、当g3≤d<g4时,选定所述第四预设发球角度修正系数h4对所述第i预设发球角度ci进行修正,修正后的发球机的发球角度为ci×h4,选定所述第四预设发球速度修正系数y4对所述第i预设发球速度di进行修正,修正后的发球机的发球速度为di×y4;
41、当g4≤d时,选定所述第五预设发球角度修正系数h5对所述第i预设发球角度ci进行修正,修正后的发球机的发球角度为ci×h5,选定所述第五预设发球速度修正系数y5对所述第i预设发球速度di进行修正,修正后的发球机的发球速度为di×y5。
42、在其中一个实施例中,在基于所述工作状态数据对所述发球机进行控制之后,还包括:
43、获取所述发球机的发球频率p;
44、获取接球者的当前体征数据,并根据所述当前体征数据计算所述接球者的疲劳程度值w,其中,所述当前体征数据为接球者的心率指数、接球者的失球数量和接球者的训练时长;
45、根据所述疲劳程度值w对所述发球机的发球频率p进行调节。
46、在其中一个实施例中,在基于所述工作状态数据对所述发球机进行控制之后,还包括:
47、获取所述发球机的发球频率p;
48、获取接球者的当前体征数据,并根据所述当前体征数据计算所述接球者的疲劳程度值w,其中,所述当前体征数据为接球者的心率指数、接球者的失球数量和接球者的训练时长;
49、根据所述疲劳程度值w对所述发球机的发球频率p进行调节。
50、在其中一个实施例中,根据所述疲劳程度值w对所述发球机的发球频率p进行调节时,包括:
51、预设疲劳程度值矩阵r,设定r(r1,r2,r3,r4),其中,r1为第一预设疲劳程度值,r2为第二预设疲劳程度值,r3为第三预设疲劳程度值,r4为第四预设疲劳程度值,且r1<r2<r3<r4;
52、预设发球机的发球频率调节系数矩阵n,设定n(n1,n2,n3,n4,n5),其中,n1为第一预设发球频率调节系数,n2为第二预设发球频率调节系数,n3为第三预设发球频率调节系数,n4为第四预设发球频率调节系数,n5为第五预设发球频率调节系数,且0.7<n1<n2<n3<n4<n5<1;
53、根据所述疲劳程度值w与各预设疲劳程度值之间的关系对所述发球机的发球频率p进行调节:
54、当w<r1时,选定所述第一预设发球频率调节系数n1对所述发球机的发球频率p进行调节,调节后的发球机的发球频率为p×n1;
55、当r1≤w<r2时,选定所述第二预设发球频率调节系数n2对所述发球机的发球频率p进行调节,调节后的发球机的发球频率为p×n2;
56、当r2≤w<r3时,选定所述第三预设发球频率调节系数n3对所述发球机的发球频率p进行调节,调节后的发球机的发球频率为p×n3;
57、当r3≤w<r4时,选定所述第四预设发球频率调节系数n4对所述发球机的发球频率p进行调节,调节后的发球机的发球频率为p×n4;
58、当r4≤w时,选定所述第五预设发球频率调节系数n5对所述发球机的发球频率p进行调节,调节后的发球机的发球频率为p×n5。
59、为了实现上述目的,本发明提供了一种基于ar技术的智能教学装置,使用如上任一项所述的基于ar技术的智能教学方法,所述装置包括:
60、拍摄模块,用于确定目标拍摄区域,基于所述目标拍摄区域拍摄第一运动图像,并在预设时间内拍摄若干待合成图像;
61、生成模块,与所述拍摄模块连接,用于将若干待合成图像和所述第一运动图像进行图像合成以生成实时的球类运动轨迹;
62、判断模块,与所述生成模块连接,用于判断所述实时的球类运动轨迹是否符合预设球类运动轨迹,若是,则不对发球机进行控制;若否,则根据所述球类运动轨迹设定所述发球机的工作状态数据;
63、控制模块,与所述判断模块连接,用于基于所述工作状态数据对所述发球机进行控制。
64、本发明提供了一种基于ar技术的智能教学方法及装置,相较现有技术,具有以下有益效果:
65、本发明公开了一种基于ar技术的智能教学方法及装置,确定目标拍摄区域,基于目标拍摄区域拍摄第一运动图像,并在预设时间内拍摄若干待合成图像,将若干待合成图像和第一运动图像进行图像合成以生成实时的球类运动轨迹,判断实时的球类运动轨迹是否符合预设球类运动轨迹,若是,则不对发球机进行控制,若否,则根据球类运动轨迹设定发球机的工作状态数据,基于工作状态数据对发球机进行控制。本发明可以根据实时的球类运动轨迹来对发球机的发球数据进行设定,进而实现对发球机的智能化控制,有效提高教学质量和教学效率。
- 还没有人留言评论。精彩留言会获得点赞!