一种叶片损伤巡检地图构建方法和叶片损伤巡检方法
本发明涉及风机叶片损伤检测,尤其涉及一种叶片损伤巡检地图构建方法和叶片损伤巡检方法。
背景技术:
1、受风资源环境限制,风电场主要位于离城市的郊区、荒漠、戈壁滩、草原及近海。虽然风能储量优势明显,但同样面临恶劣环境不利影响。风机叶片长期遭受强风、强沙、盐雾、冰霜、雨雪侵蚀,非常容易造成叶片表面受损。同时,叶片长期受到不稳定载荷作用,容易出现深部结构疲劳损伤。例如,雷击是诱发风电机组叶片损伤主要原因之一,它会在叶片内部产生破坏性内部冲击波,导致叶片分层、脱胶和叶尖脱落。再如,叶片结冰会导致其旋转不平衡,会给轮毂施加更大的有害载荷。出现表面损伤的叶片容易在表面出现裂痕、空洞等现象,出现深度损伤的叶片容易在内部会出现裂纹扩展等问题,导致严重影响风机叶片的安全使用。叶片损伤也会导致风电机组降功率运行,从而导致发电量减少、有效使用时长缩短。因此,如果不能及时发现叶片损伤,会在很大程度上造成叶片损伤加剧、倒塔甚至其他危险事故。
2、定期对叶片进行损伤巡检,逐渐成为及时发现叶片损伤情况的主要手段。而传统的叶片运维主要依赖人力,具体为巡检人员定期巡检时,采用高倍望远镜观测法、乘坐高空吊篮目测检查等方式来检查叶片是否有损伤。这些方式存在诸多缺点:需要依靠经验判断,主观性强;需要停机检查,发电损失大;高空作业,影响人身安全。为此,相关技术中对传统的人工巡检方式进行了改进,采用无人机对叶片进行损伤巡检。
3、但相关技术中利用无人机进行叶片损伤巡检时,每次都需要依靠操作人员凭借经验控制无人机的巡检路线,很容易出现漏检或重复检测的情况,导致巡检效率较低;此外,相关技术中利用无人机进行损伤巡检时,通常仅针对叶片的表面损伤位置进行重点关注,忽略了对深度损伤位置的重点关注,导致检测可靠性较低,检测精准性较低,巡检效果差。因此,如何构建包含深度损伤区域和表面损伤区域的损伤巡检地图,提高损伤巡检的效率、精准性和可靠性,成为亟需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种叶片损伤巡检地图构建方法和叶片损伤巡检方法,以解决现有技术中的叶片损伤巡检方法存在效率低、精准性差、可靠性差的问题。
2、为了实现上述目的,根据本发明的第一方面,提供了一种
3、叶片损伤巡检地图构建方法,包括以下步骤:获取待巡检的叶片的深度损伤三维图像;获取待巡检的叶片的表面损伤三维图像;先将深度损伤三维图像和表面损伤三维图像融合,得到损伤融合图像,再提取损伤融合图像中的全部损伤区域;或者先提取深度损伤三维图像中的深度损伤区域,提取表面损伤三维图像中的表面损伤区域,再将深度损伤三维图像和表面损伤三维图像融合,得到具有全部损伤区域的损伤融合图像。
4、进一步地,获取待巡检的叶片的深度损伤图像具体包括以下步骤:建立待检测的风机叶片的三维仿真分析模型;对三维仿真模型进行应力分析,得到三维应力云图;将三维应力云图作为深度损伤三维图像;获取待巡检的叶片的表面损伤图像具体包括以下步骤:利用无人机对待巡检的叶片拍摄,得到待巡检的叶片的表面损伤三维图像。
5、进一步地,利用无人机对待巡检的叶片拍摄,得到待巡检的叶片的表面损伤三维图像具体包括以下步骤:利用无人机对叶片的前缘、压力侧、后缘、吸力侧四个角度进行拍摄,得到四张图像,形成图像序列;或者利用无人机沿着依次经过前缘、压力侧、后缘、吸力侧的预设航线对叶片进行拍摄,得到多张图像,形成图像序列;采用多视图三维重建算法进行图像拼接,对图像序列进行sfit特征提取和匹配,对图像序列中的点、边缘、轮廓进行特征提取和匹配;利用线性三角法求三维空间点坐标云,重建得到稀疏点云;利用光束法平差,进行优化;通过经典稠密算法pmvs,得到稠密空间有向点云或者面片;滤除错误的点云或者面片数据,得到完整的叶片宏观三维图像,作为表面损伤三维图像。
6、进一步地,将深度损伤三维图像和表面损伤三维图像融合,得到损伤融合图像具体包括如下步骤:对深度损伤三维图像进行二值化处理,得到深度损伤二值图像;对表面损伤三维图像进行二值化处理,得到表面损伤二值图像;以深度损伤二值图像为基体,将表面损伤二值图像按照比例映射至深度损伤二值图像中,形成损伤融合图像。
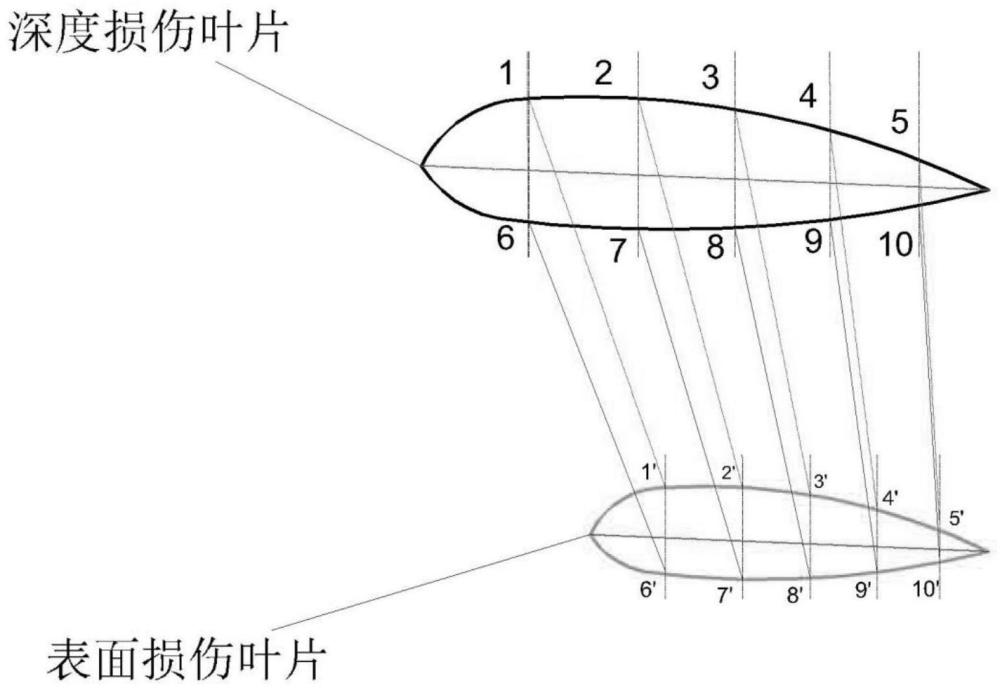
7、进一步地,对深度损伤三维图像进行二值化处理,得到深度损伤二值图像具体包括如下步骤:提取深度损伤三维图像中的每个像素点;获取每个像素点的颜色分量;将每个像素点的颜色分量所处的阈值范围与第一设定阈值范围进行比较,将位于第一设定阈值范围内的像素点和位于第一设定阈值范围外的像素点中的一个修改为白色、另一个修改为黑色;对表面损伤三维图像进行二值化处理,得到表面损伤二值图像具体包括如下步骤:获取表面损伤三维图像的灰度图像;提取灰度图像中的每个像素点;获取每个像素点的灰度值;将灰度值大于第二设定阈值范围的像素点和灰度值小于第二设定阈值范围的像素点分割形成两组,一组修改为黑色,另一组修改为白色;其中,第二设定阈值采用自定义阈值法和迭代阈值法相结合的方式确定,包括以下步骤:s11,选取一个初始阈值g,g=(gmin+gmax)/2,式中gmin为灰度图像最小灰度值,gmax为灰度图像最大灰度值;s12,根据初始阈值g将灰度图像分割成两组,记为p1和p2;p1由灰度值大于g的所有像素组成,p2由灰度值小于等于g的所有像素组成;s13,计算p1和p2均值μ1和μ2;计算出新的阈值g1,且g1=(μ1+μ2)/2;s14,若g1不再变化,则g1即为第二设定阈值;否则重复s2和s3,重新计算新的阈值g1,直至连续迭代中新的阈值g1的差值小于预定值为止,将最新迭代得到的新的阈值g1作为第二设定阈值;以深度损伤二值图像为基体,将表面损伤二值图像按照比例映射至深度损伤二值图像中,形成损伤融合图像具体包括如下步骤:在对三维仿真分析模型施加应力进行应力分析前,获取三维仿真分析模型的原始三维应力云图,记录原始三维应力云图中各结点的原始坐标;通过原始三维应力云图中各结点的原始坐标获取深度损伤二值图像中前缘端点、后缘端点的坐标;利用深度损伤二值图像中前缘端点、后缘端点的坐标计算深度损伤二值图像中叶片的第一弦长;获取表面损伤二值图像中前缘端点和后缘端点的坐标;利用表面损伤二值图像中前缘端点、后缘端点的坐标计算表面损伤二值图像中叶片的第二弦长;将深度损伤二值图像依据第一弦长,等分成n个第一小段,形成2n个第一映射点;将表面损伤二值图像依据第二弦长,等分为n个第二小段,形成2n个第二映射点;将2n个第二映射点与2n个第一映射点分别一一对应,将表面损伤二值图像与深度损伤二值图像相融合,得到损伤融合图像。
8、进一步地,提取损伤融合图像中的全部损伤区域具体包括以下步骤:基于alphashapes算法进行提取损伤区域的边界,在一个空间离散点集a中,共有m个离散点,m个点可以连接成m*(m-1)/2条线段;对于所有离散点,以alpha为半径作圆,且圆必须经过点q1、q2两个点,如果圆内无其他离散点,则q1、q2必在边界上,线段q1-q2属于边界线段;具体的计算步骤如下:s21,遍历所有边界线段q1-q2;s22,若q1-q2的长度大于直径2倍的alpha,则跳过;s23,依据几何原理,求得两个圆的圆心r1、r2;s24,两个圆中有一个圆内部不包含点集a中的其余任何点,则线段q1-q2即为边界;用多段平滑的直线连接散落的边界,形成损伤区域的轮廓线,即得到多个不规则的多边形,每个多边形对应一个损伤区域。
9、进一步地,提取深度损伤三维图像中的深度损伤区域具体包括以下步骤:从三维应力云图中筛选并标记出应力大于叶片材料许用应力的结点坐标,结点坐标的集合形成深度损伤区域;提取表面损伤三维图像中的表面损伤区域具体包括以下步骤:通过图像识别标记出表面损伤三维图像中的表面损伤区域及其三维坐标。
10、进一步地,图像识别时,提取图像中的损伤特征包括裂纹、砂眼、凹坑、剥落;将损伤特征预先输入深度学习算法模型进行特征识别训练,利用训练后的深度学习算法模型进行图像识别;在进行图像拼接和/或图像识别之前,还包括对图像信息进行预处理,具体包括以下步骤:进行直方图均衡化处理和/或进行中值滤波以消除图像中的部分噪声;利用无人机对待巡检的叶片拍摄时,控制无人机的飞行速度小于或等于4m/s;控制无人机与叶片的距离小于或等于0.5m;控制无人机沿着预设航线飞行时,记录无人机的位置信息,根据风机叶片所处的位置信息,确定无人机拍摄每张图像时所处的叶片区域信息,并将存储的图像及位置信息传输给操作无人机的工作人员在后台进行图像处理分析,以得到表面损伤三维图像。
11、进一步地,叶片损伤巡检地图构建方法还包括以下步骤:将损伤区域定义为损伤巡检地图中的待检测区域;将损伤区域以外的区域定义为损伤巡检地图中的行走区域;待检测区域和行走区域共同形成损伤巡检地图。
12、根据本发明的另一方面,提供了一种叶片损伤巡检方法,包括以下步骤:根据叶片损伤巡检地图中的待检测区域的坐标和行走区域的坐标规划无人机的巡检路线,以使无人机经过全部的待检测区域的用时最短;其中,叶片损伤巡检地图根据上述的叶片损伤巡检地图构建方法构建而成;控制无人机按照巡检路线飞行;当无人机经过待检测区域时,控制无人机对待巡检的叶片进行拍摄,得到巡检图片。
13、应用本发明提供的叶片损伤巡检地图构建方法,能够获得包含有深度损伤区域和表面损伤区域的损伤融合图像,利用损伤融合图像形成的叶片损伤巡检地图,来指导无人机飞行,从而使无人机对损伤融合图像中的全部损伤区域进行巡检。
14、应用本发明提供的叶片损伤巡检方法,利用叶片损伤巡检地图对无人机的巡检路线进行合理规划,使无人机经过全部的待检测区域的用时最短,从而能够高效、精准、可靠地对深度损伤区域和表面损伤区域均进行巡检。
15、本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
- 还没有人留言评论。精彩留言会获得点赞!