一种基于点云重建的目标追踪方法及系统与流程
本申请涉及目标追踪,特别是涉及一种基于点云重建的目标追踪方法及系统。
背景技术:
1、在逆向工程中通过测量仪器得到的产品外观表面的点数据集合也称之为点云,通常使用三维坐标测量机所得到的点数量比较少,点与点的间距也比较大,叫稀疏点云;而使用三维激光扫描仪或照相式扫描仪得到的点云,点数量比较大并且比较密集,叫密集点云。点云可直接测量,通过激光雷达扫描物体可直接产生点云,点云更加接近于设备的原始表征。原始的数据利于端到端的学习,点云的表达方式更为简单,一个物体可以表示为一个n*d的矩阵,根据追踪目标的实时运动状态、预测运动状态对追踪设备进行反馈调整,以实现对追踪目标的持续稳定跟踪。
2、综上所述,本申请解决了现有技术中无法根据追踪目标的实际情况进行监测设备的调整,提供的反馈图像视频不稳定的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够对追踪目标持续稳定追踪的一种基于点云重建的目标追踪方法及系统。
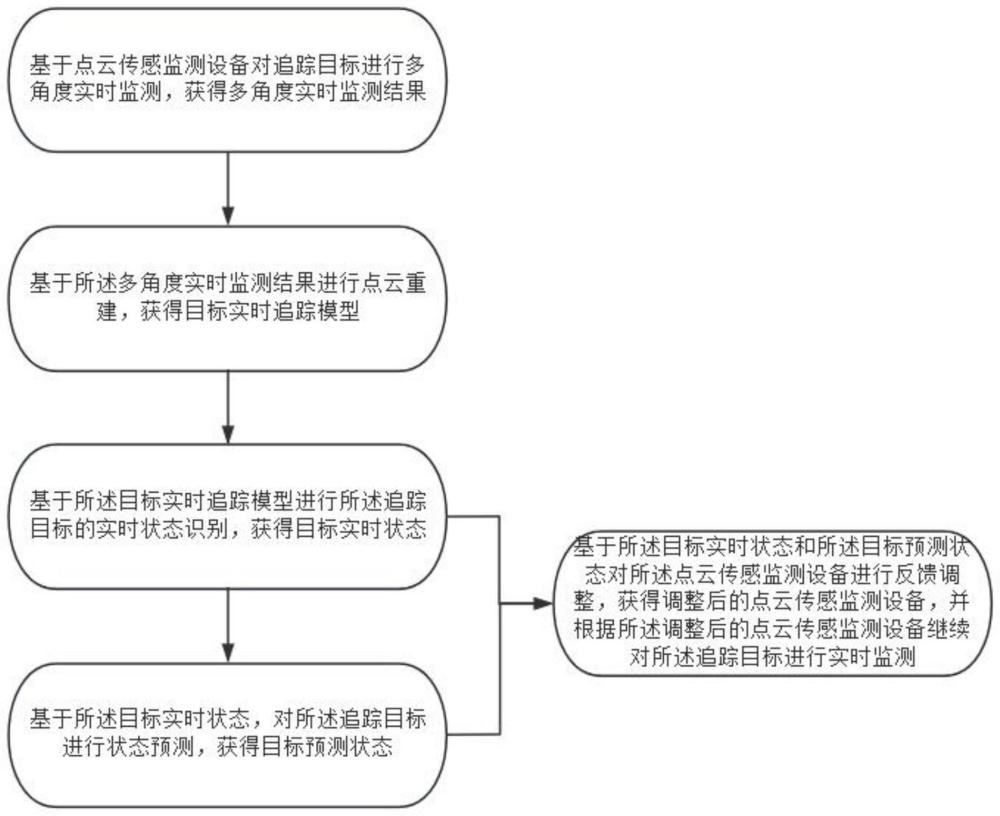
2、第一方面,本申请提供了一种基于点云重建的目标追踪方法,所述方法包括:基于点云传感监测设备对追踪目标进行多角度实时监测,获得多角度实时监测结果;基于所述多角度实时监测结果进行点云重建,获得目标实时追踪模型;基于所述目标实时追踪模型进行所述追踪目标的实时状态识别,获得目标实时状态;基于所述目标实时状态,对所述追踪目标进行状态预测,获得目标预测状态;基于所述目标实时状态和所述目标预测状态对所述点云传感监测设备进行反馈调整,获得调整后的点云传感监测设备,并根据所述调整后的点云传感监测设备继续对所述追踪目标进行实时监测。
3、第二方面,本申请提供了一种基于点云重建的目标追踪系统,所述系统包括:多角度实时监测结果获得模块,所述多角度实时监测结果获得模块用于基于点云传感监测设备对追踪目标进行多角度实时监测,获得多角度实时监测结果;目标实时追踪模型获得模块,所述目标实时追踪模型获得模块用于基于所述多角度实时监测结果进行点云重建,获得目标实时追踪模型;目标实时状态获得模块,所述目标实时状态获得模块用于基于所述目标实时追踪模型进行所述追踪目标的实时状态识别,获得目标实时状态;目标预测状态获得模块,所述目标预测状态获得模块用于基于所述目标实时状态,对所述追踪目标进行状态预测,获得目标预测状态;跟踪目标实时监测模块,所述跟踪目标实时监测模块用于基于所述目标实时状态和所述目标预测状态对所述点云传感监测设备进行反馈调整,获得调整后的点云传感监测设备,并根据所述调整后的点云传感监测设备继续对所述追踪目标进行实时监测。
4、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
5、首先,基于点云传感监测设备对追踪目标进行多角度实时监测,获得多角度实时监测结果;其次基于所述多角度实时监测结果进行点云重建,获得目标实时追踪模型;接下来基于所述目标实时追踪模型进行所述追踪目标的实时状态识别,获得目标实时状态;然后基于所述目标实时状态,对所述追踪目标进行状态预测,获得目标预测状态;最后基于所述目标实时状态和所述目标预测状态对所述点云传感监测设备进行反馈调整,获得调整后的点云传感监测设备,并根据所述调整后的点云传感监测设备继续对所述追踪目标进行实时监测。本申请解决了现有技术中无法根据追踪目标的实际情况进行监测设备的调整,提供的反馈图像视频不稳定的技术问题,达到了对追踪目标持续稳定追踪的技术效果。
6、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其他目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种基于点云重建的目标追踪方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,基于所述多角度实时监测结果进行点云重建,获得目标实时追踪模型,包括:
3.如权利要求2所述的方法,其特征在于,基于所述多角度实时监测结果进行预处理,获得多角度标准点云数据,包括:
4.如权利要求1所述的方法,其特征在于,基于所述目标实时追踪模型进行所述追踪目标的实时状态识别,获得目标实时状态,包括:
5.如权利要求1所述的方法,其特征在于,基于所述目标实时状态,对所述追踪目标进行状态预测,获得目标预测状态,包括:
6.如权利要求1所述的方法,其特征在于,基于所述目标实时状态和所述目标预测状态对所述点云传感监测设备进行反馈调整,包括:
7.一种基于点云重建的目标追踪系统,其特征在于,所述系统包括:
技术总结
本申请涉及目标追踪技术领域,提供一种基于点云重建的目标追踪方法及系统。所述方法包括:基于点云传感监测设备对追踪目标进行多角度实时监测,获得多角度实时监测结果;获得目标实时追踪模型;基于所述目标实时追踪模型进行所述追踪目标的实时状态识别,获得目标实时状态;对所述追踪目标进行状态预测,获得目标预测状态;基于所述目标实时状态和所述目标预测状态对所述点云传感监测设备进行反馈调整,并根据调整后的点云传感监测设备继续对所述追踪目标进行实时监测。本申请解决了现有技术中无法根据追踪目标的实际情况进行监测设备的调整,提供的反馈图像视频不稳定的技术问题,达到了对追踪目标持续稳定追踪的技术效果。
技术研发人员:闫军,项炎平
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!