基于集成算法的相机扰动识别方法与装置与流程
本发明涉及扰动识别,具体涉及基于集成算法的相机扰动识别方法与装置。
背景技术:
1、相机扰动识别是指通过分析图像数据,识别出由相机扰动引起的失真、模糊或变形。这种扰动可能源于各种因素,如相机的移动、光线条件的变化,以及目标物体的姿态变化等。这些扰动可能导致图像质量的下降,甚至影响后续的图像处理和机器学习任务。因此,如何有效地识别相机扰动,并对之进行处理,是当前亟待解决的问题之一。
2、现有技术中存在的相机扰动识别工作由于不够严谨且完备性不足而识别效果不准确的问题,使得最终关于相机扰动识别无法提高识别准确度。
技术实现思路
1、本申请提供了基于集成算法的相机扰动识别方法与装置,解决了现有技术中存在的相机扰动识别工作由于不够严谨且完备性不足而识别效果不准确的问题,实现了关于相机扰动识别准确度的提高。
2、鉴于上述问题,本申请提供了基于集成算法的相机扰动识别方法。
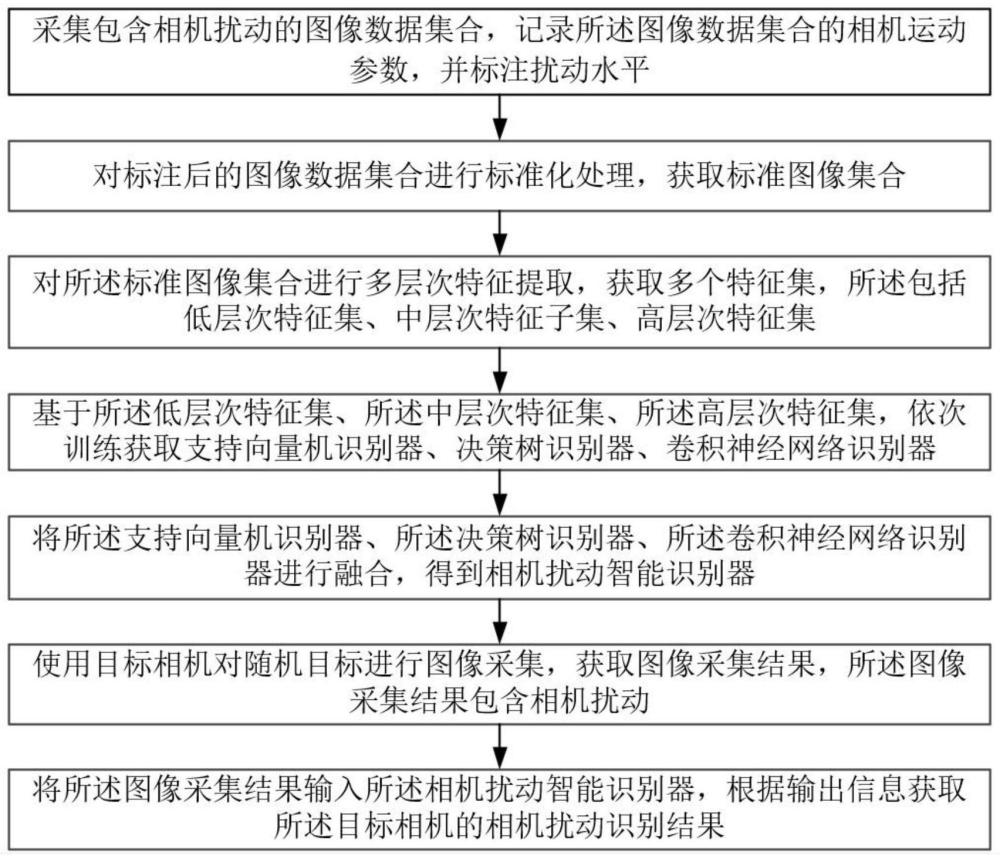
3、第一方面,本申请提供了基于集成算法的相机扰动识别方法,方法包括:采集包含相机扰动的图像数据集合,记录所述图像数据集合的相机运动参数,并标注扰动水平;对标注后的图像数据集合进行标准化处理,获取标准图像集合;对所述标准图像集合进行多层次特征提取,获取多个特征集,所述包括低层次特征集、中层次特征子集、高层次特征集;基于所述低层次特征集、所述中层次特征集、所述高层次特征集,依次训练获取支持向量机识别器、决策树识别器、卷积神经网络识别器;将所述支持向量机识别器、所述决策树识别器、所述卷积神经网络识别器进行融合,得到相机扰动智能识别器;使用目标相机对随机目标进行图像采集,获取图像采集结果,所述图像采集结果包含相机扰动;将所述图像采集结果输入所述相机扰动智能识别器,根据输出信息获取所述目标相机的相机扰动识别结果。
4、第二方面,本申请提供了基于集成算法的相机扰动识别装置,装置包括:数据采集模块:采集包含相机扰动的图像数据集合,记录所述图像数据集合的相机运动参数,并标注扰动水平;标准化处理模块:对标注后的图像数据集合进行标准化处理,获取标准图像集合;特征提取模块:对所述标准图像集合进行多层次特征提取,获取多个特征集,所述包括低层次特征集、中层次特征子集、高层次特征集;识别器训练模块:基于所述低层次特征集、所述中层次特征集、所述高层次特征集,依次训练获取支持向量机识别器、决策树识别器、卷积神经网络识别器;训练器融合模块:将所述支持向量机识别器、所述决策树识别器、所述卷积神经网络识别器进行融合,得到相机扰动智能识别器;图像采集模块:使用目标相机对随机目标进行图像采集,获取图像采集结果,所述图像采集结果包含相机扰动;扰动识别模块:将所述图像采集结果输入所述相机扰动智能识别器,根据输出信息获取所述目标相机的相机扰动识别结果。
5、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
6、本申请实施例提供的基于集成算法的相机扰动识别方法与装置,通过采集包含相机扰动的图像数据集合,记录图像数据集合的相机运动参数,并标注扰动水平进行标准化处理,获取标准图像集合,再对标准图像集合进行多层次特征提取,获取多个特征集,包括低层次特征集、中层次特征子集、高层次特征集,依次训练获取支持向量机识别器、决策树识别器、卷积神经网络识别器并进行融合,得到相机扰动智能识别器,然后使用目标相机对随机目标进行图像采集,获取图像采集结果,最后将图像采集结果输入相机扰动智能识别器,根据输出信息获取目标相机的相机扰动识别结果,解决了现有技术中存在的相机扰动识别工作由于不够严谨且完备性不足而识别效果不准确的问题,实现了关于相机扰动识别准确度的提高。
技术特征:
1.基于集成算法的相机扰动识别方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,对所述标准图像集合进行多层次特征提取,包括:
3.如权利要求1所述的方法,其特征在于,还包括:
4.如权利要求1所述的方法,其特征在于,将所述支持向量机识别器、所述决策树识别器、所述卷积神经网络识别器进行融合,包括:
5.如权利要求4所述的方法,其特征在于,还包括:
6.如权利要求1所述的方法,其特征在于,还包括:
7.如权利要求1所述的方法,其特征在于,还包括:
8.基于集成算法的相机扰动识别装置,其特征在于,所述装置包括:
技术总结
本发明公开了基于集成算法的相机扰动识别方法与装置,涉及扰动识别技术领域,方法包括:采集包含相机扰动的图像数据集合,记录所述图像数据集合的相机运动参数;获取标准图像集合;对所述标准图像集合进行多层次特征提取,获取多个特征集;依次训练获取支持向量机识别器、决策树识别器、卷积神经网络识别器;将所述支持向量机识别器、所述决策树识别器、所述卷积神经网络识别器进行融合,得到相机扰动智能识别器;获取图像采集结果;根据输出信息获取所述目标相机的相机扰动识别结果,解决了现有技术中存在的相机扰动识别工作由于不够严谨且完备性不足而识别效果不准确的问题,实现了关于相机扰动识别准确度的提高。
技术研发人员:闫军,项炎平
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!