汽车整车姿态角确定方法及装置与流程
本发明涉及汽车,尤其涉及汽车整车姿态角确定方法及装置。
背景技术:
1、汽车的整车姿态角是研究汽车操纵稳定性、舒适性能、耐久性能等性能的重要输入参数之一,受到各主机厂的重点关注。而汽车整车姿态角通常采用常规的陀螺仪进行检测,测量精度往往不能满足要求,因此需要考虑提供一种高精度的汽车整车姿态角检测方案,以便得到高精度的汽车整车姿态角。
技术实现思路
1、本发明通过提供汽车整车姿态角确定方法及装置,解决了如何得到高精度的汽车整车姿态角的技术问题。
2、一方面,本发明提供如下技术方案:
3、一种汽车整车姿态角确定方法,包括:
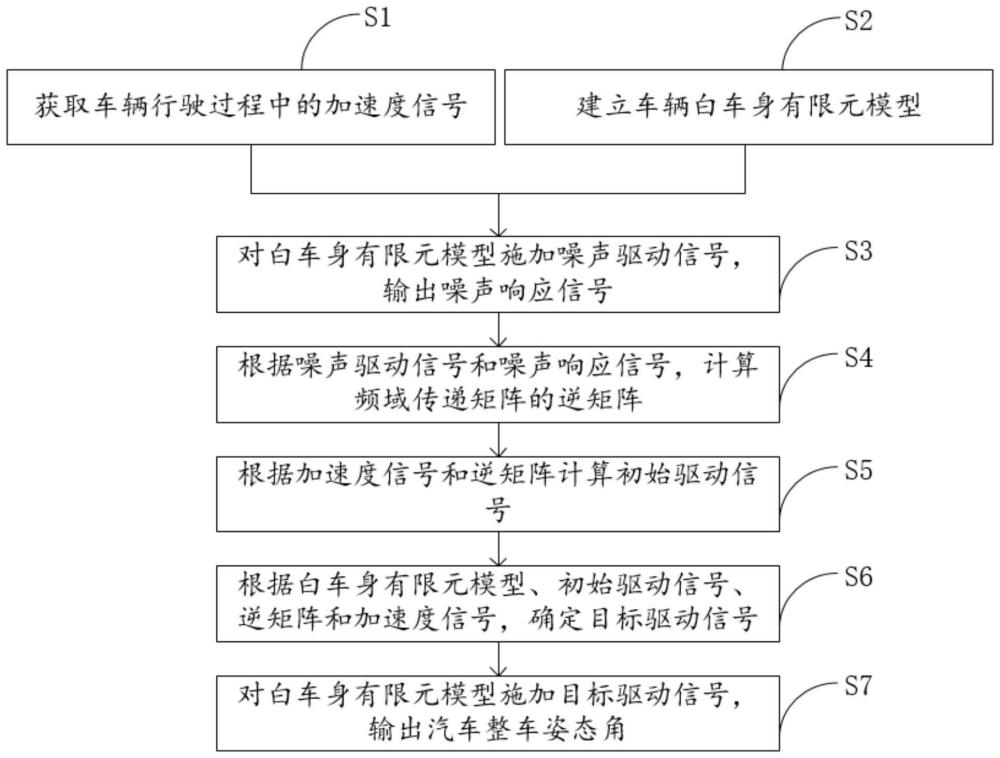
4、获取车辆行驶过程中的加速度信号;
5、建立车辆白车身有限元模型;
6、对所述白车身有限元模型施加噪声驱动信号,输出噪声响应信号;
7、根据所述噪声驱动信号和所述噪声响应信号,计算频域传递矩阵的逆矩阵;
8、根据所述加速度信号和所述逆矩阵计算初始驱动信号;
9、根据所述白车身有限元模型、所述初始驱动信号、所述逆矩阵和所述加速度信号,确定目标驱动信号;目标响应信号与所述加速度信号之间的误差低于预设阈值,所述目标响应信号为对所述白车身有限元模型施加所述目标驱动信号后得到的响应信号;
10、对所述白车身有限元模型施加所述目标驱动信号,输出汽车整车姿态角。
11、可选的,所述根据所述噪声驱动信号和所述噪声响应信号,计算频域传递矩阵的逆矩阵,包括:
12、对所述噪声驱动信号进行傅里叶变换,得到第一变换结果;
13、对所述噪声响应信号进行傅里叶变换,得到第二变换结果;
14、将所述第一变换结果除以所述第二变换结果,得到所述频域传递矩阵;
15、计算所述频域传递矩阵的所述逆矩阵。
16、可选的,所述根据所述加速度信号和所述逆矩阵计算初始驱动信号,包括:
17、对所述加速度信号进行傅里叶变换,得到第三变换结果;
18、将所述第三变换结果与所述逆矩阵相乘,得到所述初始驱动信号。
19、可选的,所述根据所述白车身有限元模型、所述初始驱动信号、所述逆矩阵和所述加速度信号,确定目标响应信号和所述目标响应信号对应的目标驱动信号,包括:
20、将所述初始驱动信号作为当前驱动信号,对所述白车身有限元模型施加所述初始驱动信号,输出当前响应信号;
21、循环进行预设过程,直至所述目标响应信号与所述加速度信号之间的误差低于所述预设阈值;
22、所述预设过程包括:根据所述当前驱动信号、所述逆矩阵、所述加速度信号和所述当前响应信号,计算下一个驱动信号;对所述白车身有限元模型施加所述下一个驱动信号,输出下一个响应信号;判断所述下一个响应信号与所述加速度信号之间的误差是否低于所述预设阈值;若是,则将所述下一个驱动信号作为所述目标驱动信号;若否,则将所述下一个驱动信号作为所述当前驱动信号、将所述下一个响应信号作为所述当前响应信号。
23、可选的,所述根据所述当前驱动信号、所述逆矩阵、所述加速度信号和所述当前响应信号,计算下一个驱动信号,包括:
24、dinput(n)=dinput(n-1)+f-1*(aoutput_m-aoutput(n-1));
25、dinput(n)为所述下一个驱动信号,dinput(n-1)为所述当前响应信号,f-1为所述逆矩阵,aoutput_m为所述加速度信号,aoutput(n-1)为所述当前响应信号。
26、另一方面,本发明还提供如下技术方案:
27、一种汽车整车姿态角确定装置,包括:
28、获取模块,用于获取车辆行驶过程中的加速度信号;
29、建模模块,用于建立车辆白车身有限元模型;
30、输出模块,用于对所述白车身有限元模型施加噪声驱动信号,输出噪声响应信号;
31、计算模块,用于根据所述噪声驱动信号和所述噪声响应信号,计算频域传递矩阵的逆矩阵;
32、根据所述加速度信号和所述逆矩阵计算初始驱动信号;
33、确定模块,用于根据所述白车身有限元模型、所述初始驱动信号、所述逆矩阵和所述加速度信号,确定目标驱动信号;目标响应信号与所述加速度信号之间的误差低于预设阈值,所述目标响应信号为对所述白车身有限元模型施加所述目标驱动信号后得到的响应信号;
34、所述输出模块,还用于对所述白车身有限元模型施加所述目标驱动信号,输出汽车整车姿态角。
35、可选的,所述计算模块,还用于对所述噪声驱动信号进行傅里叶变换,得到第一变换结果;对所述噪声响应信号进行傅里叶变换,得到第二变换结果;将所述第一变换结果除以所述第二变换结果,得到所述频域传递矩阵;计算所述频域传递矩阵的所述逆矩阵。
36、可选的,所述计算模块,还用于对所述加速度信号进行傅里叶变换,得到第三变换结果;
37、将所述第三变换结果与所述逆矩阵相乘,得到所述初始驱动信号。
38、可选的,所述确定模块,还用于将所述初始驱动信号作为当前驱动信号,对所述白车身有限元模型施加所述初始驱动信号,输出当前响应信号;
39、循环进行预设过程,直至所述目标响应信号与所述加速度信号之间的误差低于所述预设阈值;
40、所述预设过程包括:根据所述当前驱动信号、所述逆矩阵、所述加速度信号和所述当前响应信号,计算下一个驱动信号;对所述白车身有限元模型施加所述下一个驱动信号,输出下一个响应信号;判断所述下一个响应信号与所述加速度信号之间的误差是否低于所述预设阈值;若是,则将所述下一个驱动信号作为所述目标驱动信号;若否,则将所述下一个驱动信号作为所述当前驱动信号、将所述下一个响应信号作为所述当前响应信号。
41、可选的,所述确定模块根据所述当前驱动信号、所述逆矩阵、所述加速度信号和所述当前响应信号,计算下一个驱动信号,包括:
42、dinput(n)=dinput(n-1)+f-1*(aoutput_m-aoutput(n-1));
43、dinput(n)为所述下一个驱动信号,dinput(n-1)为所述当前响应信号,f-1为所述逆矩阵,aoutput_m为所述加速度信号,aoutput(n-1)为所述当前响应信号。
44、另一方面,本发明还提供如下技术方案:
45、一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一汽车整车姿态角确定方法。
46、另一方面,本发明还提供如下技术方案:
47、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在被处理器执行时实现上述任一汽车整车姿态角确定方法。
48、本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
49、本发明以目标响应信号与加速度信号之间的误差低于预设阈值为目标,根据白车身有限元模型、初始驱动信号、逆矩阵和加速度信号,确定目标驱动信号,相当于通过仿真得到使目标响应信号与加速度信号一致的目标驱动信号,对白车身有限元模型施加目标驱动信号,输出汽车整车姿态角,可以得到高精度的汽车整车姿态角。
- 还没有人留言评论。精彩留言会获得点赞!