船舶搭靠作业的真伪确定方法、装置和可读储存介质与流程
本发明涉及海上船舶监测,具体而言,涉及一种船舶搭靠作业的真伪确定方法、装置和可读储存介质。
背景技术:
1、现有的船舶搭靠识别方法,大部分都是基于ais(automatic identificationsystem,一种应用于船和岸、船和船之间的海事安全与通信的新型助航系统)数据来进行判定的,通过实时监控两个船舶的距离,或者搭靠母船的有效搭靠区域中是否有其他船舶存在来完成搭靠的识别。但是这样的搭靠识别方法通常会引起一些误判数据,尤其是船舶在港口码头停泊或者在狭小航道中航行时,因为泊位之间距离短,航道狭小,很容易满足上述识别方法,进而产生很多无效的搭靠记录,需要研判人员手动排除这些误判的搭靠记录,增加了相关负责人员的工作量。
2、例如在授权公告号为cn115565407b的《船舶搭靠作业的真伪确定方法、装置和可读储存介质》专利中,指出了根据被搭靠船舶的尺寸信息、动态信息和预设的搭靠距离阈值之间的关系,计算出船舶有效搭靠区域,进而获取该区域内的船舶,以及持续监控这种空间关系是否满足设定时长阈值来判断是否有船舶正在和被搭靠船舶发生搭靠行为。但是这种基于空间判定的方法并不具有全局实用性,在一些特殊的场景可能会存在判定错误的情况。例如在港口内的码头,泊位或者内河狭小的航道中,这些特殊场景中,船舶在地理上相距会靠的很近,且会满足一定时间,这样船舶之间的空间关系很容易满足利用空间算法判定搭靠的逻辑,进而造成搭靠记录误报的情况。
3、因此,为了辨别这些误判的搭靠记录,发明一种船舶搭靠作业的真伪确定方法是目前亟待解决的技术问题。
技术实现思路
1、本发明旨在解决或改善现有技术中传统的搭靠识别方法通常会引起误判搭靠记录,而这些误判的搭靠记录无法排除的技术问题。
2、本发明的第一方面在于提供一种船舶搭靠作业的真伪确定方法。
3、本发明的第二方面在于提供一种船舶搭靠作业的真伪确定装置。
4、本发明的第三方面在于提供一种电子设备。
5、本发明的第四方面在于提供一种可读储存介质。
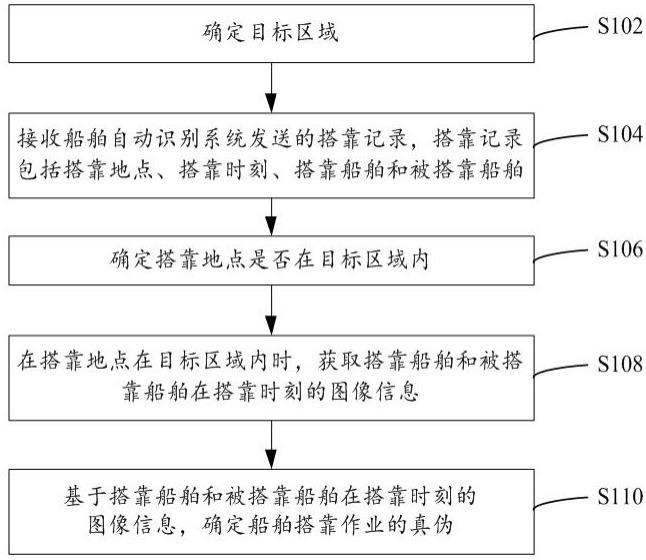
6、本发明提供的船舶搭靠作业的真伪确定方法,包括:确定目标区域;接收船舶自动识别系统发送的搭靠记录,搭靠记录包括搭靠地点、搭靠时刻、搭靠船舶和被搭靠船舶;确定搭靠地点是否在目标区域内;在搭靠地点在目标区域内时,获取搭靠船舶和被搭靠船舶在搭靠时刻的图像信息;基于搭靠船舶和被搭靠船舶在搭靠时刻的图像信息,确定船舶搭靠作业的真伪。
7、本发明提供的船舶搭靠作业的真伪确定方法,先确定目标区域,目标区域也即船舶在该区域内进行正常航行或停靠泊而被船舶自动识别系统误认为产生停靠作业的区域,可以设置为位于码头0米至100米的范围,然后接收船舶自动识别系统发送的搭靠记录,搭靠记录也即被船舶自动识别系统判定为进行船舶搭靠作业的记录,搭靠记录包括搭靠地点、搭靠时刻、搭靠船舶和被搭靠船舶,确定搭靠地点是否在目标区域内,如果搭靠地点不在目标区域内,说明该条搭靠记录对应的船舶搭靠作业为真,在搭靠地点在目标区域内时,说明该条搭靠记录对应的船舶搭靠作业有可能为伪,此时获取搭靠船舶和被搭靠船舶在搭靠时刻的图像信息,然后根据搭靠船舶和被搭靠船舶在搭靠时刻的图像信息,确定船舶搭靠作业的真伪。本发明提供的船舶搭靠作业的真伪确定方法,可以对船舶自动识别系统判定的船舶搭靠作业的记录进行二次判定,识别出在特殊场景区域内正常作业,满足船舶自动识别系统的判定船舶搭靠的条件,但是实际没有搭靠的情况,排除无效搭靠事件,提高识别船舶搭靠的准确性,大大提升有关执法部门的执法效率。其中,特殊场景也即可能存在搭靠记录为伪的搭靠地点,特殊场景包括航道、巷口、码头等。
8、在一些技术方案中,可选地,基于搭靠船舶和被搭靠船舶在搭靠时刻的图像信息,确定船舶搭靠作业的真伪的步骤包括:基于搭靠船舶的图像信息,确定搭靠船舶在搭靠时刻是否处于靠停泊状态;基于被搭靠船舶的图像信息,确定被搭靠船舶在搭靠时刻是否处于靠停泊状态;在搭靠船舶或被搭靠船舶中的一个未处于靠停泊状态时,确定船舶搭靠作业为真,否则为伪。
9、在该技术方案中,获取到搭靠船舶和被搭靠船舶在搭靠时刻的图像信息后,判断搭靠船舶和被搭靠船舶是否均处于停泊状态,如果搭靠船舶和被搭靠船舶均处于靠停泊状态,说明船舶搭靠作业为伪,如果搭靠船舶或被搭靠船舶中的一个未处于靠停泊状态时,说明船舶搭靠作业为真。
10、在一些技术方案中,可选地,基于搭靠船舶的图像信息,确定搭靠船舶在搭靠时刻是否处于靠停泊状态的步骤包括:基于图像信息确定搭靠船舶与码头之间的距离;其中,搭靠船舶与码头之间的距离为搭靠船舶的所有点与码头的所有点之间最短的距离;图像信息中包括搭靠船舶的位置和码头的位置;在距离小于第一预设距离时,确定搭靠船舶在搭靠时刻处于靠停泊状态。
11、在该技术方案中,由于搭靠地点在目标区域内,因此,图像信息中包括搭靠船舶的位置和码头的位置,这样就可以基于搭靠船舶图像信息确定搭靠船舶与码头之间的距离,在距离小于第一预设距离时,说明搭靠船舶在搭靠时刻处于靠停泊状态。其中,在计算搭靠船舶与码头之间的距离时,可以基于图像距离与实际距离的比例关系计算。
12、在一些技术方案中,可选地,基于被搭靠船舶的图像信息,确定被搭靠船舶在搭靠时刻是否处于靠停泊状态的步骤包括:基于图像信息确定被搭靠船舶与码头之间的距离;其中,被搭靠船舶与码头之间的距离为被搭靠船舶的所有点与码头的所有点之间最短的距离;图像信息中包括被搭靠船舶的位置和码头的位置;在距离小于第二预设距离时,确定被搭靠船舶在搭靠时刻处于靠停泊状态。
13、在该技术方案中,由于搭靠地点在目标区域内,因此,图像信息中包括被搭靠船舶的位置和码头的位置,这样就可以基于被搭靠船舶图像信息确定被搭靠船舶与码头之间的距离,在距离小于第二预设距离时,说明被搭靠船舶在搭靠时刻处于靠停泊状态。其中,在计算被搭靠船舶与码头之间的距离时,可以基于图像距离与实际距离的比例关系计算。
14、在一些技术方案中,可选地,第一预设距离和第二预设距离均大于等于a 米,且小于等于b米。a大于等于0米,b小于等于10米,例如a等于0,b等于10米,可选地,b等于5米。
15、在一些技术方案中,可选地,基于搭靠船舶的图像信息,确定搭靠船舶在搭靠时刻是否处于靠停泊状态的步骤包括:从搭靠船舶的图像信息中提取第一特征信息,基于第一特征信息确定搭靠船舶在搭靠时刻处于靠停泊状态。
16、在一些技术方案中,可选地,基于被搭靠船舶的图像信息,确定被搭靠船舶在搭靠时刻是否处于靠停泊状态的步骤包括:从被搭靠船舶的图像信息中提取第二特征信息,基于第二特征信息确定被搭靠船舶在搭靠时刻处于靠停泊状。
17、在该些技术方案中,可从搭靠船舶的图像信息和被搭靠船舶的图像信息中提取特征信息,以判断搭靠船舶和被搭靠船舶是否处于靠停泊状态。以搭靠船舶为例,由于搭靠船舶在靠停泊状态时,其通常停靠在特定位置,所以当提取到搭靠船舶的图像信息中的码头、船首向、泊位等信息时,可以计算出船舶和码头、泊位之间的相对位置、角度和距离,故而判断搭靠船舶是否处于靠停泊状态。也即,第一特征信息包括码头、船首向、泊位等信息。被搭靠船舶的靠停泊状态判断原理也一样,也即第二特征信息包括码头、船首向、泊位等信息。
18、在一些技术方案中,可选地,船舶搭靠作业的真伪确定方法还包括:确定航道区域,航道区域的宽度小于第一预设宽度,其中,航道区域的宽度为垂直于搭靠船舶和被搭靠船舶运动方向上的长度;确定搭靠地点是否在航道区域内;当搭靠地点在航道区域内时,确定船舶搭靠作业为伪。
19、在该技术方案中,由于航道区域的宽度通常较窄,这样多艘船舶在行驶过程中很容易距离比较近,而导致被船舶自动识别系统误认为属于船舶搭靠作业,此时,如果搭靠地点在航道区域内,则默认该船舶搭靠作业为伪,因为有关条例规定,在宽度较窄的航道内通常是不允许进行船舶搭靠作业的,故而本发明可以排除这种航道内的无效搭靠事件。
20、在一些技术方案中,可选地,第一预设宽度大于等于c 米,且小于等于d米。可选地,c大于等于5米,d小于等于30米,例如c等于5米,d等于30米,可选地,d等于20米。
21、在一些技术方案中,可选地,船舶搭靠作业的真伪确定方法还包括:在确定船舶搭靠作业为伪时,输出船舶搭靠作业时的作业信息。
22、在该技术方案中,在确定船舶搭靠作业为伪时,输出船舶搭靠作业时的作业信息,作业信息包括作业时间、作业地点、作业图像中的至少一项,这样工作人员可以针对伪的船舶搭靠作业进行再次核查,确保判断的精准率。
23、本发明第二方面提供了一种船舶搭靠作业的真伪确定装置,包括:确定单元,用于确定目标区域;接收单元,用于接收船舶自动识别系统发送的搭靠记录,搭靠记录包括搭靠地点、搭靠时刻、搭靠船舶和被搭靠船舶;确定单元还用于:确定搭靠地点是否在目标区域内;获取单元,用于在搭靠地点在目标区域内时,获取搭靠船舶和被搭靠船舶在搭靠时刻的图像信息;确定单元还用于:基于搭靠船舶和被搭靠船舶在搭靠时刻的图像信息,确定船舶搭靠作业的真伪。
24、本发明第三方面提供了一种电子设备,包括储存器和处理器,储存器上存储有计算机程序或指令,处理器执行计算机程序或指令时实现如本技术第一方面任一项技术方案提供的船舶搭靠作业的真伪确定方法。
25、本发明第四方面提供了一种可读储存介质,可读储存介质上存储有程序或指令,处理器执行程序或指令时实现如本技术第一方面任一项技术方案提供的船舶搭靠作业的真伪确定方法。
26、根据本发明的附加方面和优点将在下面的描述部分中变得明显,或通过根据本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!