一种边坡位移监测方法及系统与流程
本发明涉及边坡位移监测,尤其涉及一种边坡位移监测方法及系统。
背景技术:
1、边坡是自然或人工形成的斜坡,是人类工程活动中最基本的地质环境之一,也是工程建设中最常见的工程形式。边坡的地质灾害会严重危及公路及公路运输的安全和畅通。边坡位移监测是保障边坡安全的非常重要的手段之一。在现代建筑中,边坡位移监测可以用于多种场景,例如高速公路、铁路、水库大坝、地铁隧道等。监测边坡位移可以及时发现变形迹象并进行预警,从而避免边坡发生危险。边坡位移监测通常采用如下方法:基于电子测距技术的激光位移监测、基于高精度gps技术的卫星位移监测,基于磁力计和加速度计的微震监测及基于摄像技术的监测,摄像监测技术以安装在边坡的摄像设备为基础,通过定时拍摄边坡的照片,再利用图像处理技术,对照片进行特征提取和分析,以获取边坡的位移数据,但是摄像技术的监测中,通常会受到边坡环境因素的影响,导致照片的特征提取及分析不不准确,进而导致后续的位移数据测量不准确。
技术实现思路
1、本发明提供一种边坡位移监测方法及系统以解决上述背景技术中的问题。
2、本发明的方案是:
3、一种边坡位移监测方法,包括下列步骤:
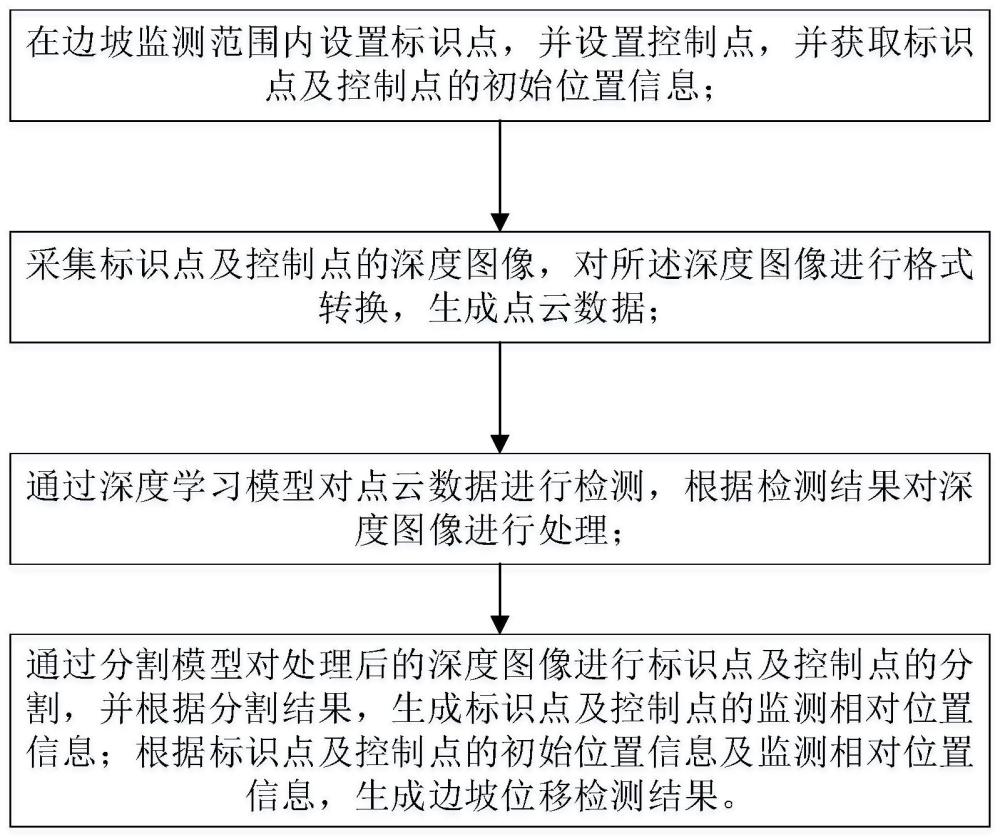
4、1)在边坡监测范围内设置标识点,并设置控制点,获取标识点及控制点的初始位置信息;
5、2)采集标识点及控制点的深度图像,对所述深度图像进行格式转换,生成点云数据;
6、3)通过深度学习模型对点云数据进行检测,根据检测结果对深度图像进行处理;
7、4)通过分割模型对处理后的深度图像进行标识点、控制点的分割,并根据分割结果,生成标识点、控制点的监测相对位置信息;根据标识点、控制点的初始位置信息、监测相对位置信息,生成边坡位移检测结果。
8、作为优选的技术方案,所述标识点、控制点采用规则图案,并以规则图案的中心点位置作为初始位置信息。
9、作为优选的技术方案,所述深度学习模型采用图像信息处理模型,图像信息处理模型结构为输入层、旋转对齐网络,与旋转对其网络连接的第一个卷积层、第一个图卷积层,第一个卷积层与第一个图卷积层的输出结果进行加权与融合的方式连接到第二个图卷积层,第一个卷积层还连接第二个卷积层,第二个卷积层与第二个图卷积层加权与融合结果输入到第三个图卷积层,第三图卷积层的输出端依次连接全连接层、输出层。
10、作为优选的技术方案,所述分割模型采用全卷积神经网络。
11、作为优选的技术方案,所述边坡位移检测结果的生成过程为:
12、在分割结果中,将标识点、控制点的中心像素作为监测像素,根据监测像素的三维位置信息,在相机坐标系下,根据监测像素的三维位置信息,计算标识点、控制点的相对位置信息,并根据相机坐标系、世界坐标系的转换关系,将相机坐标系下的相对位置信息转换到世界坐标下的监测相对位置信息,根据世界坐标下的监测相对位置信息及控制点的初始位置信息,根据空间三点定标方法确定监测过程中标识点的监测位置信息,根据标识点的监测位置信息、初始位置信息,生成边坡位移检测结果。
13、本发明还公开了一种基于边坡位移监测方法的对应监测系统,包括定位模块、采集模块、检测模块与位移监测模块;
14、定位模块用于获取标识点与控制点的初始位置信息;
15、采集处理模块用于采集标识点与控制点的深度图像,对所述深度图像进行格式转换,生成点云数据;
16、检测模块用于通过深度学习模型对点云数据进行检测,根据检测结果对深度图像进行处理;
17、位移监测模块用于通过分割模型对处理后的深度图像进行标识点、控制点的分割,并根据分割结果,生成标识点、控制点的监测相对位置信息;根据标识点、控制点的初始位置信息与监测相对位置信息,生成边坡位移检测结果。
18、作为优选的技术方案,所述检测模块中,所述深度学习模型采用图像信息处理模型,其中结构为输入层、旋转对齐网络,与旋转对其网络连接的第一个卷积层与第一个图卷积层,第一个卷积层与第一个图卷积层的输出结果进行加权与融合的方式连接到第二个图卷积层,第一个卷积层还连接第二个卷积层,第二个卷积层与第二个图卷积层加权与融合结果输入到第三个图卷积层,第三图卷积层的输出端依次连接全连接层及输出层。
19、作为优选的技术方案,所述位移监测模块中,所述分割模型采用全卷积神经网络。
20、作为优选的技术方案,所述位移监测模块中,边坡位移检测结果的生成过程为,
21、在分割结果中,将标识点及控制点的中心像素作为监测像素,根据监测像素的三维位置信息,在相机坐标系下,根据监测像素的三维位置信息,计算标识点、控制点的相对位置信息,并根据相机坐标系、世界坐标系的转换关系,将相机坐标系下的相对位置信息转换到世界坐标下的监测相对位置信息,根据世界坐标下的监测相对位置信息、控制点的初始位置信息,根据空间三点定标方法确定监测过程中标识点的监测位置信息,根据标识点的监测位置信息、初始位置信息,生成边坡位移检测结。
22、由于采用了上述技术方案一种边坡位移监测方法及系统,1)在边坡监测范围内设置标识点,并设置控制点,获取标识点及控制点的初始位置信息;2)采集标识点及控制点的深度图像,对所述深度图像进行格式转换,生成点云数据;3)通过深度学习模型对点云数据进行检测,根据检测结果对深度图像进行处理;
23、4)通过分割模型对处理后的深度图像进行标识点、控制点的分割,并根据分割结果,生成标识点、控制点的监测相对位置信息;根据标识点、控制点的初始位置信息、监测相对位置信息,生成边坡位移检测结果。
24、本发明的优点:
25、本发明能够将周围环境的影响因素进行去除,并实时监测其是否发生损害,并在去除影响因素后,通过自动识别标识物及位置解算的方法确定监测过程中的标识物的位置信息,根据最初的标识物位置信息和当前标识物的位置信息,计算边坡的位移量。
26、去除环境影响后,本发明标识物的识别更加准确进而定位更加准确,同时本发明还在边坡监测过程中,监测由边坡形态展现的损害,及时告警相关人员,具有很好的实用性。
技术特征:
1.一种边坡位移监测方法,其特征在于,包括下列步骤:
2.如权利要求1所述一种边坡位移监测方法,其特征在于:所述标识点、控制点采用规则图案,并以规则图案的中心点位置作为初始位置信息。
3.如权利要求1所述一种边坡位移监测方法,其特征在于:所述深度学习模型采用图像信息处理模型,图像信息处理模型结构为输入层、旋转对齐网络,与旋转对其网络连接的第一个卷积层、第一个图卷积层,第一个卷积层与第一个图卷积层的输出结果进行加权与融合的方式连接到第二个图卷积层,第一个卷积层还连接第二个卷积层,第二个卷积层与第二个图卷积层加权与融合结果输入到第三个图卷积层,第三图卷积层的输出端依次连接全连接层、输出层。
4.如权利要求1所述一种边坡位移监测方法,其特征在于:所述分割模型采用全卷积神经网络。
5.如权利要求1所述一种边坡位移监测方法,其特征在于,所述边坡位移检测结果的生成过程为:
6.一种基于如权利要求1至6任意一项所述边坡位移监测方法的对应监测系统,其特征在于:包括定位模块、采集模块、检测模块与位移监测模块;
7.如权利要求6所述的一种基于边坡位移监测方法的对应监测系统,其特征在于:所述检测模块中,所述深度学习模型采用图像信息处理模型,其中结构为输入层、旋转对齐网络,与旋转对其网络连接的第一个卷积层与第一个图卷积层,第一个卷积层与第一个图卷积层的输出结果进行加权与融合的方式连接到第二个图卷积层,第一个卷积层还连接第二个卷积层,第二个卷积层与第二个图卷积层加权与融合结果输入到第三个图卷积层,第三图卷积层的输出端依次连接全连接层及输出层。
8.如权利要求6所述一种基于边坡位移监测方法的对应监测系统,其特征在于:所述位移监测模块中,所述分割模型采用全卷积神经网络。
9.如权利要求6所述一种基于边坡位移监测方法的对应监测系统,其特征在于:所述位移监测模块中,边坡位移检测结果的生成过程为,
技术总结
本发明公开了一种边坡位移监测方法及系统,1)在边坡监测范围内设置标识点,并设置控制点,获取标识点及控制点的初始位置信息;2)采集标识点及控制点的深度图像,对所述深度图像进行格式转换,生成点云数据;3)通过深度学习模型对点云数据进行检测,根据检测结果对深度图像进行处理;4)通过分割模型对处理后的深度图像进行标识点、控制点的分割,并根据分割结果,生成标识点、控制点的监测相对位置信息;根据标识点、控制点的初始位置信息、监测相对位置信息,生成边坡位移检测结果;本发明标识物的识别更加准确进而定位更加准确,同时本发明还在边坡监测过程中,监测由边坡形态展现的损害,及时告警相关人员,具有很好的实用性。
技术研发人员:李树建,李小双,徐孟超,王孟来,王佳文,李启航,谢言宏,赵雷
受保护的技术使用者:云南磷化集团有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!