一种基于驾驶行为的毫米波雷达数据清洗方法及系统与流程
本发明涉及智能交通的,特别是涉及一种基于驾驶行为的毫米波雷达数据清洗方法及系统。
背景技术:
1、毫米波雷达是智能交通领域中一种重要的检测设备,发出的探测电磁波频率很高,波长在毫米级。毫米波雷达具有极强的空间分辨力和较高的跟踪、测速精度,能够识别出检测目标的大小形状,且不受烟、灰尘和雾的影响,因此常用于路口检测、汽车驾驶等领域,对道路上的车辆目标进行检测和识别。
2、在实际检测中,现有毫米波雷达仍存在一些缺陷:横向分辨率较低,即当车辆目标运动方向和雷达电磁波探测方向大致垂直的时候,雷达对目标的横向位置和横向速度的检测精度都较差;当车辆目标处于低速行驶或静止状态时,雷达对该目标的检测易受地杂波或附近其他静止物体的干扰,得到的检测精度也较差。基于以上两点,毫米波雷达固定安装在路口时对低速和静止的车辆目标的检测效果较差,与其他传感器的数据进行融合得到的结果准确度也会比较低。因此需要对毫米波雷达检测目标后得到的原始数据进行进一步的处理,使数据能达到所需的准确度,即对毫米波雷达数据进行清洗。
3、为了解决上述问题,在现有技术下有以下几种解决方式:
4、1)人工对路口进行空间标定。通过人工测量,对路口的车道线、斑马线、人行道、绿化带的位置进行标定,构建出道路的方向和边界,从而对位置异常的目标进行过滤,并对车辆轨迹进行预判和修正。该方法配置出的道路边界比较精确,但需要标定工具,且工作量大;
5、2)人工配置车道线和停止线。省去了测量标定的步骤,直接通过肉眼观察和经验计算在雷达中配置出车道线和停止线,此方法较快速,但精度难以保证;
6、3)使用视频相机进行辅助或采用雷视一体机。通过视频图像识别出的目标数据与雷达数据进行融合,提高识别精度,同时视频相机也能对道路边界进行标定,用于支持雷达数据的清洗。但视频相机通常价格昂贵,成本较高;
7、4)人工配置雷达检测参数。通过修改雷达检测的灵敏度、调试数据过滤参数等方式使雷达能够较好地识别出低速车辆并过滤掉大部分杂波和干扰。但此方法需要根据现场路况不断调试,工作量大,且不同时段不同地点的路况变化复杂,配置的参数难以保证准确。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于驾驶行为的毫米波雷达数据清洗方法及系统,用以解决对路口进行空间标定人工成本较高或设备成本较高的问题,并在此基础上对毫米波雷达数据进行进一步清洗优化。
2、本发明的一种基于驾驶行为的毫米波雷达数据清洗方法,包括以下步骤:(1)空间标定;(2)数据清洗。
3、进一步地,所述步骤(1)中空间标定方法通过引入交通信号灯状态实现。
4、进一步地,步骤(1)的具体步骤为:在信号灯转变为红灯状态时,运动车辆逐渐减速,在停止线后静止等待;信号灯转变为绿灯时,车辆从停止线后启动,并逐渐加速至正常行驶速度,由于毫米波雷达对运动目标检测效果较好,因此根据车辆运动状态下的检测数据进行空间标定是可行的。
5、进一步地,所述步骤(2)的具体步骤为:分别记录红灯状态下和绿灯状态下的一段时间内车流运行轨迹,再将两种状态下的车流轨迹进行比对,从而自动生成停车线的位置;
6、在路口附近的车辆因为驾驶行为和车道线约束一般不会进行变道,因此可以根据车流行驶轨迹大致标定出车道线位置;
7、根据车流轨迹生成的车道线和停止线,经过滤波、平滑处理后将作为雷达数据清洗的参考。
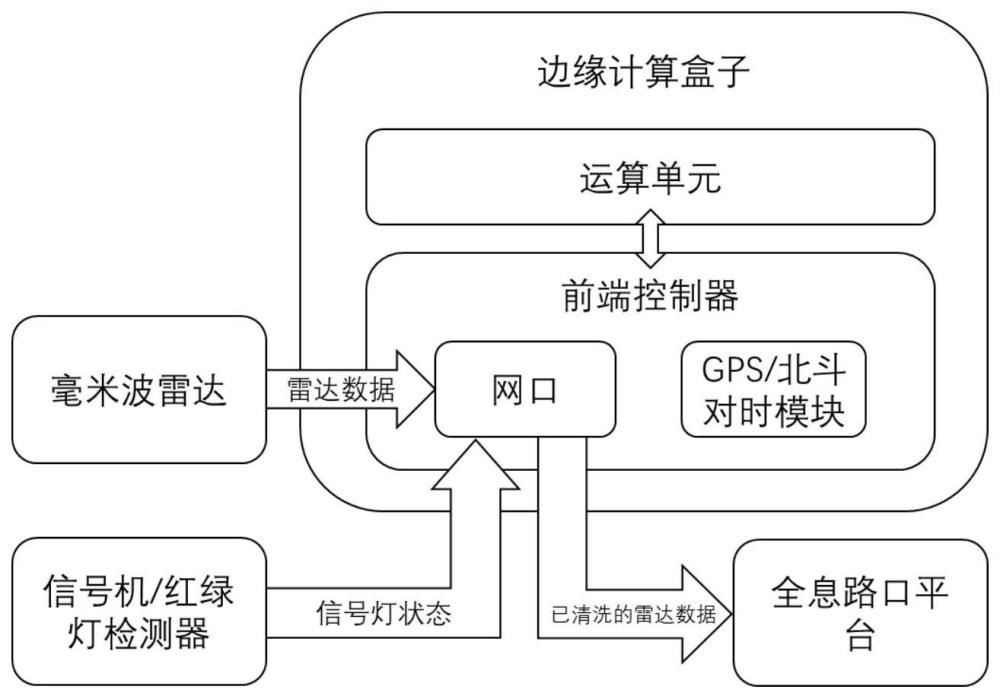
8、本发明的一种毫米波雷达数据清洗系统,由毫米波雷达、信号机/信号灯检测器、边缘计算盒子和全息路口平台组成。
9、进一步地,毫米波雷达提供原始的路口检测目标数据;
10、信号机/信号灯检测器提供路口信号灯状态。
11、进一步地,边缘计算盒子内置所述的基于驾驶行为的雷达数据清洗算法,用于完成雷达数据的清洗,且可以较为灵活地与不同厂家的毫米波雷达、信号机或信号灯检测器进行对接。
12、进一步地,全息路口平台用于展示路口的车辆运行状态。
13、与现有技术相比本发明的有益效果为:本发明提出的方法以车辆在路口的正常行驶习惯为参考,根据一定量的车辆目标检测数据划分出车道线和停止线,实现空间的标定,再根据标定好的车道线和停止线,对异常的雷达检测目标数据进行清洗和优化,并且本申请的毫米波雷达数据清洗系统可以对接收到的不同厂家雷达数据进行清洗,而不需要依赖雷达厂家去清洗数据。
技术特征:
1.一种基于驾驶行为的毫米波雷达数据清洗方法,其特征在于,包括以下步骤:(1)空间标定;(2)数据清洗。
2.如权利要求1所述的一种基于驾驶行为的毫米波雷达数据清洗方法,其特征在于,所述步骤(1)中空间标定方法通过引入交通信号灯状态实现。
3.如权利要求2所述的一种基于驾驶行为的毫米波雷达数据清洗方法,其特征在于,步骤(1)的具体步骤为:在信号灯转变为红灯状态时,运动车辆逐渐减速,在停止线后静止等待;信号灯转变为绿灯时,车辆从停止线后启动,并逐渐加速至正常行驶速度。
4.如权利要求3所述的一种基于驾驶行为的毫米波雷达数据清洗方法,其特征在于,所述步骤(2)的具体步骤为:分别记录红灯状态下和绿灯状态下的一段时间内车流运行轨迹,再将两种状态下的车流轨迹进行比对,从而自动生成停车线的位置;
5.一种毫米波雷达数据清洗系统,其特征在于,由毫米波雷达、信号机/信号灯检测器、边缘计算盒子和全息路口平台组成。
6.如权利要求5所述的一种毫米波雷达数据清洗系统,其特征在于,毫米波雷达提供原始的路口检测目标数据;
7.如权利要求6所述的一种毫米波雷达数据清洗系统,其特征在于,边缘计算盒子内置如权利要求1-4任一项所述的基于驾驶行为的雷达数据清洗算法,用于完成雷达数据的清洗。
8.如权利要求7所述的一种毫米波雷达数据清洗系统,其特征在于,全息路口平台用于展示路口的车辆运行状态。
技术总结
本发明涉及智能交通的技术领域,特别是涉及一种基于驾驶行为的毫米波雷达数据清洗方法及系统,用以解决对路口进行空间标定人工成本较高或设备成本较高的问题,并在此基础上对毫米波雷达数据进行进一步清洗优化;包括以下步骤:(1)空间标定;(2)数据清洗。
技术研发人员:陈珏州,王海恩,周珅
受保护的技术使用者:上海宝康电子控制工程有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!