实景三维建模方法、装置、计算机设备和存储介质与流程
本技术涉及计算机视觉,特别是涉及一种实景三维建模方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、实景三维是客观真实反映现实世界的三维模型,具有单体化、实体化、结构化、语义化的特点,通过融合模型三维、倾斜三维、全景三维,形成可空间量算和综合分析的模型,是一种泛三维,集多种模型优点于一体的三维数据成果。
2、相关的实景三维建模方法为空基地基影像数据融合匹配建模,将采集到空基数据和地基数据分别进行空中三角测量(简称空三)处理,再将得到的空基数据的空三结果和地基数据的空三结果合并。其中,空基数据是利用无人机等设备通过标准的航飞路线在空中对地面进行摄影拍照获取的地面物体表面的影像数据。地基数据是针对无人机的摄影盲区(如建筑物底商、屋檐下等空中拍摄不到的区域),利用手持的数码相机对目标进行地面拍摄获取的影像数据。由于空基数据和地基数据的分辨率、色彩和影像局部畸变均差异较大,相关的实景三维建模方法往往通过人工添加连接点的方式,将得到的空基数据的空三结果和地基数据的空三结果合并。
3、然而,人工连接点的精度通常不高。即使为了避免累计误差过大导致整体数据空三失败的问题,将一个大区域分割成若干小区域进行分段或分块处理,合并时仍需要解决段与段或块与块之间的接边问题,也需要引入人工连接点。因此,相关的实景三维建模方法的准确性差。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高准确性的实景三维建模方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种实景三维建模方法,包括:
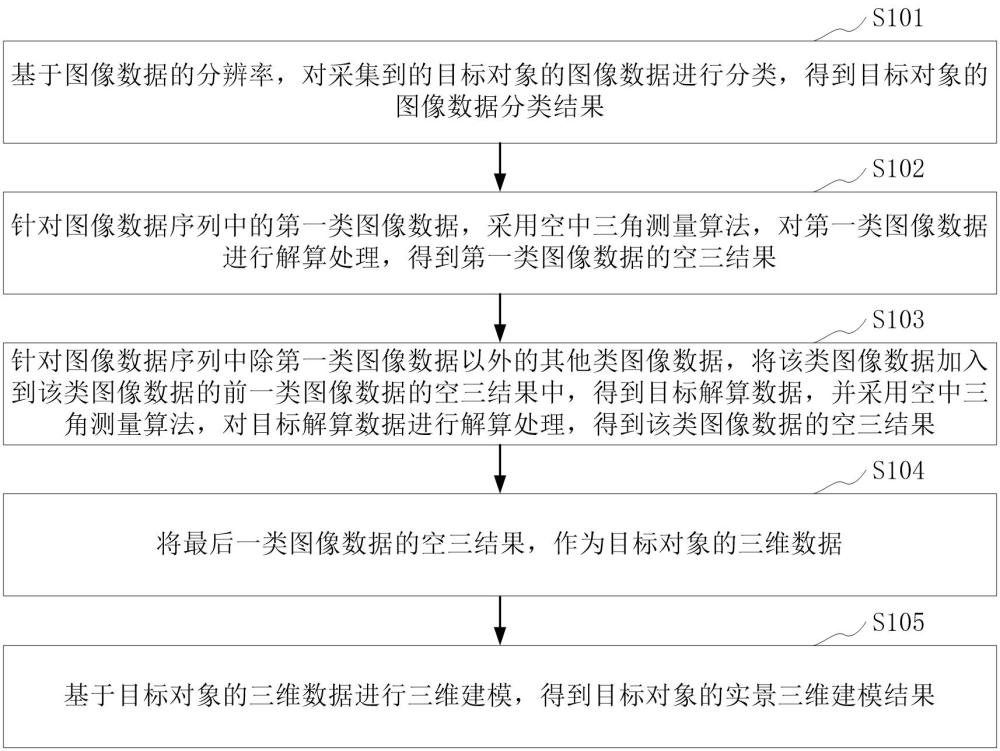
3、基于图像数据的分辨率,对采集到的目标对象的图像数据进行分类,得到所述目标对象的图像数据分类结果;所述图像数据分类结果包括图像数据序列;所述图像数据序列中各类图像数据的分辨率递增;
4、针对所述图像数据序列中的第一类图像数据,采用空中三角测量算法,对所述第一类图像数据进行解算处理,得到所述第一类图像数据的空三结果;
5、针对所述图像数据序列中除第一类图像数据以外的其他类图像数据,将所述类图像数据加入到所述类图像数据的前一类图像数据的空三结果中,得到目标解算数据,并采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果;
6、将最后一类图像数据的空三结果,作为所述目标对象的三维数据;
7、基于所述目标对象的三维数据进行三维建模,得到所述目标对象的实景三维建模结果。
8、在其中一个实施例中,所述采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果,包括:
9、将所述类图像数据的前一类图像数据的空三结果的连接点,作为公共连接点;
10、基于所述公共连接点,采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果。
11、在其中一个实施例中,所述基于所述公共连接点,采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果,包括:
12、对所述公共连接点、以及所述类图像数据的特征点进行匹配,确定特征点匹配信息;
13、基于所述特征点匹配信息和所述第一类图像数据,调整相机参数,直至所述类图像数据的空三结果的平差满足预设条件,得到所述类图像数据的空三结果。
14、在其中一个实施例中,所述采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果,包括:
15、基于所述类图像数据的分辨率和所述类图像数据的前一类图像数据的分辨率,确定所述类图像数据与所述类图像数据的前一类图像数据间的分辨率比例信息;
16、基于所述分辨率比例信息和所述类图像数据,生成所述类图像数据的金字塔信息;
17、采用空中三角测量算法,对所述类图像数据的金字塔信息和所述类图像数据的前一类图像数据进行解算处理,得到所述类图像数据的空三结果。
18、在其中一个实施例中,所述采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果,包括:
19、对所述类图像数据和所述类图像数据的前一类图像数据,进行多视角的仿射变换,得到所述类图像数据的仿射变换结果和所述类图像数据的前一类图像数据的仿射变换结果;
20、采用空中三角测量算法,对所述类图像数据的仿射变换结果和所述类图像数据的前一类图像数据的仿射变换结果进行解算处理,得到所述类图像数据的空三结果。
21、在其中一个实施例中,所述图像数据包括空基数据和地基数据,所述方法还包括:
22、通过空基数据采集设备,在空中对地面的目标对象进行拍摄,采集所述目标对象的空基数据;
23、通过地基数据采集设备,针对所述空基数据采集设备的摄影盲区,对所述目标对象进行地面拍摄,采集所述目标对象的地基数据。
24、第二方面,本技术还提供了一种实景三维建模装置,包括:
25、分类模块,用于基于图像数据的分辨率,对采集到的目标对象的图像数据进行分类,得到所述目标对象的图像数据分类结果;所述图像数据分类结果包括图像数据序列;所述图像数据序列中各类图像数据的分辨率递增;
26、第一处理模块,用于针对所述图像数据序列中的第一类图像数据,采用空中三角测量算法,对所述第一类图像数据进行解算处理,得到所述第一类图像数据的空三结果;
27、第二处理模块,用于针对所述图像数据序列中除第一类图像数据以外的其他类图像数据,将所述类图像数据加入到所述类图像数据的前一类图像数据的空三结果中,得到目标解算数据,并采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果;
28、确定模块,用于将最后一类图像数据的空三结果,作为所述目标对象的三维数据;
29、建模模块,用于基于所述目标对象的三维数据进行三维建模,得到所述目标对象的实景三维建模结果。
30、在其中一个实施例中,所述第二处理模块,具体用于:
31、将所述类图像数据的前一类图像数据的空三结果的连接点,作为公共连接点;
32、基于所述公共连接点,采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果。
33、在其中一个实施例中,所述第二处理模块,具体用于:
34、对所述公共连接点、以及所述类图像数据的特征点进行匹配,确定特征点匹配信息;
35、基于所述特征点匹配信息和所述第一类图像数据,调整相机参数,直至所述类图像数据的空三结果的平差满足预设条件,得到所述类图像数据的空三结果。
36、在其中一个实施例中,所述第二处理模块,具体用于:
37、基于所述类图像数据的分辨率和所述类图像数据的前一类图像数据的分辨率,确定所述类图像数据与所述类图像数据的前一类图像数据间的分辨率比例信息;
38、基于所述分辨率比例信息和所述类图像数据,生成所述类图像数据的金字塔信息;
39、采用空中三角测量算法,对所述类图像数据的金字塔信息和所述类图像数据的前一类图像数据进行解算处理,得到所述类图像数据的空三结果。
40、在其中一个实施例中,所述第二处理模块,具体用于:
41、对所述类图像数据和所述类图像数据的前一类图像数据,进行多视角的仿射变换,得到所述类图像数据的仿射变换结果和所述类图像数据的前一类图像数据的仿射变换结果;
42、采用空中三角测量算法,对所述类图像数据的仿射变换结果和所述类图像数据的前一类图像数据的仿射变换结果进行解算处理,得到所述类图像数据的空三结果。
43、在其中一个实施例中,所述图像数据包括空基数据和地基数据,所述装置还包括:
44、第一采集模块,用于通过空基数据采集设备,在空中对地面的目标对象进行拍摄,采集所述目标对象的空基数据;
45、第二采集模块,用于通过地基数据采集设备,针对所述空基数据采集设备的摄影盲区,对所述目标对象进行地面拍摄,采集所述目标对象的地基数据。
46、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的步骤。
47、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的步骤。
48、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述第一方面所述的步骤。
49、上述实景三维建模方法、装置、计算机设备、存储介质和计算机程序产品,基于图像数据的分辨率,对采集到的目标对象的图像数据进行分类,得到所述目标对象的图像数据分类结果;所述图像数据分类结果包括图像数据序列;所述图像数据序列中各类图像数据的分辨率递增;针对所述图像数据序列中的第一类图像数据,采用空中三角测量算法,对所述第一类图像数据进行解算处理,得到所述第一类图像数据的空三结果;针对所述图像数据序列中除第一类图像数据以外的其他类图像数据,将所述类图像数据加入到所述类图像数据的前一类图像数据的空三结果中,得到目标解算数据,并采用空中三角测量算法,对所述目标解算数据进行解算处理,得到所述类图像数据的空三结果;将最后一类图像数据的空三结果,作为所述目标对象的三维数据;基于所述目标对象的三维数据进行三维建模,得到所述目标对象的实景三维建模结果。这样,针对不同分辨率的图像数据,将其按照分辨率分成不同的数据类型,提出改进的增量式空中三角测量算法,以分辨率最低的图像数据为空间参考数据,按照分辨率从小到大的顺序,逐步加入分辨率高的图像数据进行解算处理,能够自动识别连接点实现数据融合,无需人工连接点,能够提高实景三维建模的准确性。
- 还没有人留言评论。精彩留言会获得点赞!