一种时间序列预测方法及系统与流程
本发明涉及时间序列预测,尤其涉及一种时间序列预测方法及系统。
背景技术:
1、时间序列预测通常被认为是一种估计许多未来领域的技术。它已经成为研究人员和学术界对统计推断和预测的主要兴趣。现实生活中的各个方面,包括经济、物理、农业和工程等,都应用了时间序列分析。例如:在经济学中,对金融时间序列数据的准确预测能够使投资者确定相关的策略和技术,以减少价格风险,保护他们的投资免受不可接受的损失。在农业领域中,也涉及对农产品产量的预测。预测最关键的应用之一是在投资风险管理方面。因此,严格选择一个有效的预测模型对管理非线性非常重要,以确保计划和决策的关键输入。目前,广义自回归条件异方差(garch)模型和指数加权移动平均(ewma)模型经常被用于时间序列预测,尤其是在考虑收益序列中存在arch效应的情况下,用于估计和预测未来的值。由于各类公开资源的广泛可用性,使得研究者可以方便地操作garch和ewma模型,以轻松开展预测工作。其中,garch模型,特别适用于在回报序列中存在arch效应的情况下估计和预测未来值。garch模型在描述样本内预测特征方面取得了显著的成就。例如应用于研究频域内冲击噪声的随机表示、国内股票交易市场的研究以及比特币波动性的研究等。
2、在先前的研究中,garch模型反映出对特定季节、月份的极值敏感,其敏感性来源于garch模型使用最大似然估计法(mlm)进行参数估计,而似然法对初始值的选择和数据分布敏感。由于时间序列数据没有明确的分布,存在不确定性,使得似然法无法可靠地管理这些不确定性。这个缺点造成了时间序列预测的一个主要问题。garch模型会强加参数约束,但估计的系数通常会违反这些约束,可能会不正确地限制条件方差过程的动态性。garch模型还无法捕捉观测中每个方差的影响,因为该模型使用的是长期平均方差。用于确定预测权重的长期平均方差的计算只考虑了整个序列,因而忽略了每个观测中方差不同效应的信息。因此,现有的时间序列预测方法的时间序列预测准确性不高。
技术实现思路
1、本发明通过提供一种时间序列预测方法及系统,解决了现有技术中时间序列预测准确性不高的技术问题,实现了提高时间序列预测的确定性和准确性的技术效果。
2、本发明提供了一种时间序列预测方法,包括:
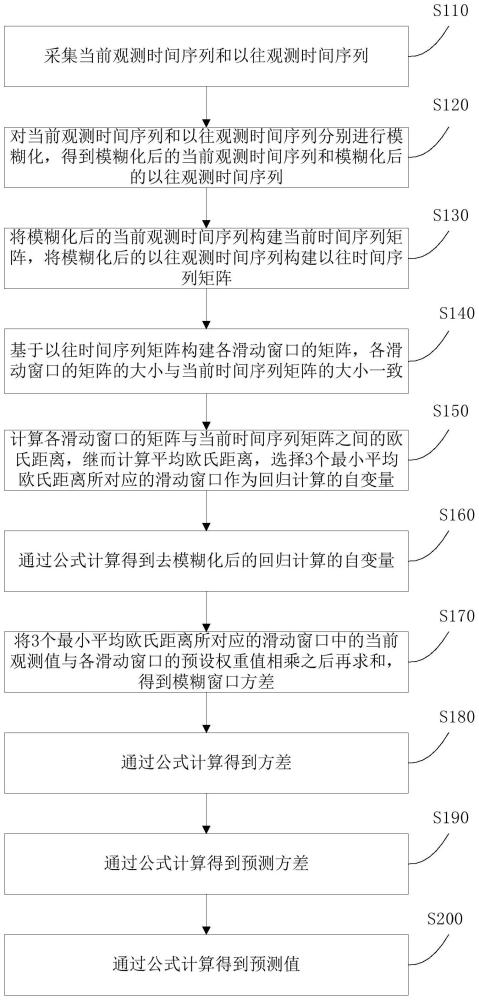
3、采集当前观测时间序列和以往观测时间序列;
4、对所述当前观测时间序列和所述以往观测时间序列分别进行模糊化,得到模糊化后的当前观测时间序列和模糊化后的以往观测时间序列;
5、将所述模糊化后的当前观测时间序列构建当前时间序列矩阵,将所述模糊化后的以往观测时间序列构建以往时间序列矩阵;
6、基于所述以往时间序列矩阵构建各滑动窗口的矩阵,所述各滑动窗口的矩阵的大小与所述当前时间序列矩阵的大小一致;
7、计算所述各滑动窗口的矩阵与所述当前时间序列矩阵之间的欧氏距离,继而计算平均欧氏距离,选择3个最小所述平均欧氏距离所对应的滑动窗口作为回归计算的自变量和
8、通过公式计算得到去模糊化后的回归计算的自变量d;其中,d={β、α、γ},δ1、δ2和δ3分别是和三角模糊数形式的第一、第二、第三个元素;
9、将所述3个最小平均欧氏距离所对应的滑动窗口中的当前观测值与各滑动窗口的预设权重值相乘之后再求和,得到模糊窗口方差fw;
10、通过公式计算得到方差其中,为上一预测时间的观测值,为上一预测时间的方差;
11、通过公式计算得到预测方差
12、通过公式计算得到预测值xn+1;其中,xn是当前观测值。
13、具体来说,所述对所述当前观测时间序列和所述以往观测时间序列分别进行模糊化,得到模糊化后的当前观测时间序列和模糊化后的以往观测时间序列,包括:
14、对所述当前观测时间序列和所述以往观测时间序列分别进行三角模糊化,得到三角模糊化后的当前观测时间序列和三角模糊化后的以往观测时间序列;
15、所述将所述模糊化后的当前观测时间序列构建当前时间序列矩阵,将所述模糊化后的以往观测时间序列构建以往时间序列矩阵,包括:
16、将所述三角模糊化后的当前观测时间序列构建当前时间序列矩阵,将所述三角模糊化后的以往观测时间序列构建以往时间序列矩阵。
17、具体来说,所述计算所述各滑动窗口的矩阵与所述当前时间序列矩阵之间的欧氏距离,包括:
18、所述滑动窗口的矩阵为swi={xn-i,xn-(i-1),xn-(i-2),xn-(i-3),…},所述当前时间序列矩阵为yi={xn-11,xn-10,xn-9,…,xn};其中,x表示矩阵一行的值,n表示总行数,i表示第i行,所述矩阵swi和所述矩阵yi中的元素均为三角模糊数形式,所述矩阵swi中元素的三角模糊数形式记为swi={x1,x2,x3},所述矩阵yi中元素的三角模糊数形式记为yi={y1,y2,y3};
19、通过公式y-sw=(y1-x3,y2-x2,y3-x1)=(z1,z2,z3)计算得到所述滑动窗口的矩阵中的数据与所述当前时间序列矩阵中的数据的差值;
20、通过公式计算得到所述欧氏距离edi,j;其中,j=1,2,3,…,12是所述矩阵swi和所述矩阵yi中元素的行数,j表示第i行的第j个元素。
21、具体来说,所述计算平均欧氏距离,包括:
22、通过公式计算得到所述平均欧氏距离ed。
23、本发明还提供了一种时间序列预测系统,包括:
24、观测数据采集模块,用于采集当前观测时间序列和以往观测时间序列;
25、数据模糊化模块,用于对所述当前观测时间序列和所述以往观测时间序列分别进行模糊化,得到模糊化后的当前观测时间序列和模糊化后的以往观测时间序列;
26、时间序列矩阵构建模块,用于将所述模糊化后的当前观测时间序列构建当前时间序列矩阵,将所述模糊化后的以往观测时间序列构建以往时间序列矩阵;
27、滑动窗口矩阵构建模块,用于基于所述以往时间序列矩阵构建各滑动窗口的矩阵,所述各滑动窗口的矩阵的大小与所述当前时间序列矩阵的大小一致;
28、欧氏距离计算模块,用于计算所述各滑动窗口的矩阵与所述当前时间序列矩阵之间的欧氏距离,继而计算平均欧氏距离,选择3个最小所述平均欧氏距离所对应的滑动窗口作为回归计算的自变量和
29、去模糊化模块,用于通过公式计算得到去模糊化后的回归计算的自变量d;其中,d={β、α、γ},δ1、δ2和δ3分别是和三角模糊数形式的第一、第二、第三个元素;
30、模糊窗口方差计算模块,用于将所述3个最小平均欧氏距离所对应的滑动窗口中的当前观测值与各滑动窗口的预设权重值相乘之后再求和,得到模糊窗口方差fw;
31、方差运算模块,用于通过公式计算得到方差其中,为上一预测时间的观测值,为上一预测时间的方差;
32、预测方差生成模块,用于通过公式计算得到预测方差
33、预测模块,用于通过公式计算得到预测值xn+1;其中,xn是当前观测值。
34、具体来说,所述数据模糊化模块,具体用于对所述当前观测时间序列和所述以往观测时间序列分别进行三角模糊化,得到三角模糊化后的当前观测时间序列和三角模糊化后的以往观测时间序列;
35、所述时间序列矩阵构建模块,具体用于将所述三角模糊化后的当前观测时间序列构建当前时间序列矩阵,将所述三角模糊化后的以往观测时间序列构建以往时间序列矩阵。
36、具体来说,所述欧氏距离计算模块,包括:
37、矩阵构建单元,用于所述滑动窗口的矩阵为swi={xn-i,xn-(i-1),xn-(i-2),xn-(i-3),…},所述当前时间序列矩阵为yi={xn-11,xn-10,xn-9,…,xn};其中,x表示矩阵一行的值,n表示总行数,i表示第i行,所述矩阵swi和所述矩阵yi中的元素均为三角模糊数形式,所述矩阵swi中元素的三角模糊数形式记为swi={x1,x2,x3},所述矩阵yi中元素的三角模糊数形式记为yi={y1,y2,y3};
38、差值计算单元,用于通过公式y-sw=(y1-x3,y2-x2,y3-x1)=(z1,z2,z3)计算得到所述滑动窗口的矩阵中的数据与所述当前时间序列矩阵中的数据的差值;
39、欧氏距离计算单元,用于通过公式计算得到所述欧氏距离edi,j;其中,j=1,2,3,…,12是所述矩阵swi和所述矩阵yi中元素的行数,j表示第i行的第j个元素;
40、平均欧氏距离计算单元,用于通过公式计算得到所述平均欧氏距离ed;
41、回归计算自变量获得单元,用于选择3个最小所述平均欧氏距离所对应的滑动窗口作为回归计算的自变量和
42、本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
43、先采集当前观测时间序列和以往观测时间序列,对当前观测时间序列和以往观测时间序列分别进行模糊化,得到模糊化后的当前观测时间序列和模糊化后的以往观测时间序列;再将模糊化后的当前观测时间序列构建当前时间序列矩阵,将模糊化后的以往观测时间序列构建以往时间序列矩阵,基于以往时间序列矩阵构建各滑动窗口的矩阵;再计算各滑动窗口的矩阵与当前时间序列矩阵之间的欧氏距离,继而计算平均欧氏距离,选择3个最小平均欧氏距离所对应的滑动窗口作为回归计算的自变量和再计算得到去模糊化后的回归计算的自变量,将3个最小平均欧氏距离所对应的滑动窗口中的当前观测值与各滑动窗口的预设权重值相乘之后再求和,得到模糊窗口方差;再通过公式依次计算得到方差、预测方差和预测值。在本发明中,通过模糊线性回归估计模型的参数,以降低计算风险,从而提高时间序列预测的确定性。另外,将时间序列数据划分为多个窗口,并在每个窗口内分别估计garch模型的参数,能够捕捉时间序列中不同时期的波动性特征,并据此进行更准确的时间序列预测。
- 还没有人留言评论。精彩留言会获得点赞!