一种工业零件尺寸测量方法、装置、系统及存储介质
本发明涉及,具体涉及一种工业零件尺寸测量方法、装置、系统及存储介质。
背景技术:
1、目前工业零件的尺寸大多是通过手工测量,手工测量存在很多问题。一是主观误差:手动测量受到人为因素的影响,如视觉误差、操作误差、读数误差等,可能导致测量结果的不准确和不一致。二是测量工具的限制:手工测量使用的测量工具具有一定的精度和测量范围限制,可能无法满足某些特殊要求的测量任务。三是测量环境的影响:手工测量容易受到环境因素的干扰,如温度变化、湿度变化、震动等,可能导致测量结果的偏差。最后是测量效率低:手工测量需要人工操作,相对较慢,不适用于大批量零件的快速测量和检验。
2、现有技术中采用点云技术可提高测量效率,如公开号为cn201810777316.x的专利申请公开了一种基于自适应阈值的点云精确配准方法,其基于待测工件测量点云和cad模型点云计算出自适应阈值,并通过自适应阈值剔除无关数据的影响,对测量点云进行刚性变换达到精确配准目的。其一方面可有效解决工业生产中自动化检测获取的三维点云与工业设计的cad模型由于无关背景数据导致的精确配准失败的问题。另一方面实现了快速测量,并减少了过程中的计算量,因此提高了配准效率。
3、在测量表面复杂的零件时,由于点云数量庞大,采用上述技术仍然需要耗费较长的时间。
技术实现思路
1、本发明的目的在于提供一种工业零件尺寸测量方法、装置、系统及存储介质,以解决现有技术中复杂的工业零件测量时耗时长的问题。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、本申请公开了一种工业零件尺寸测量方法,包括:
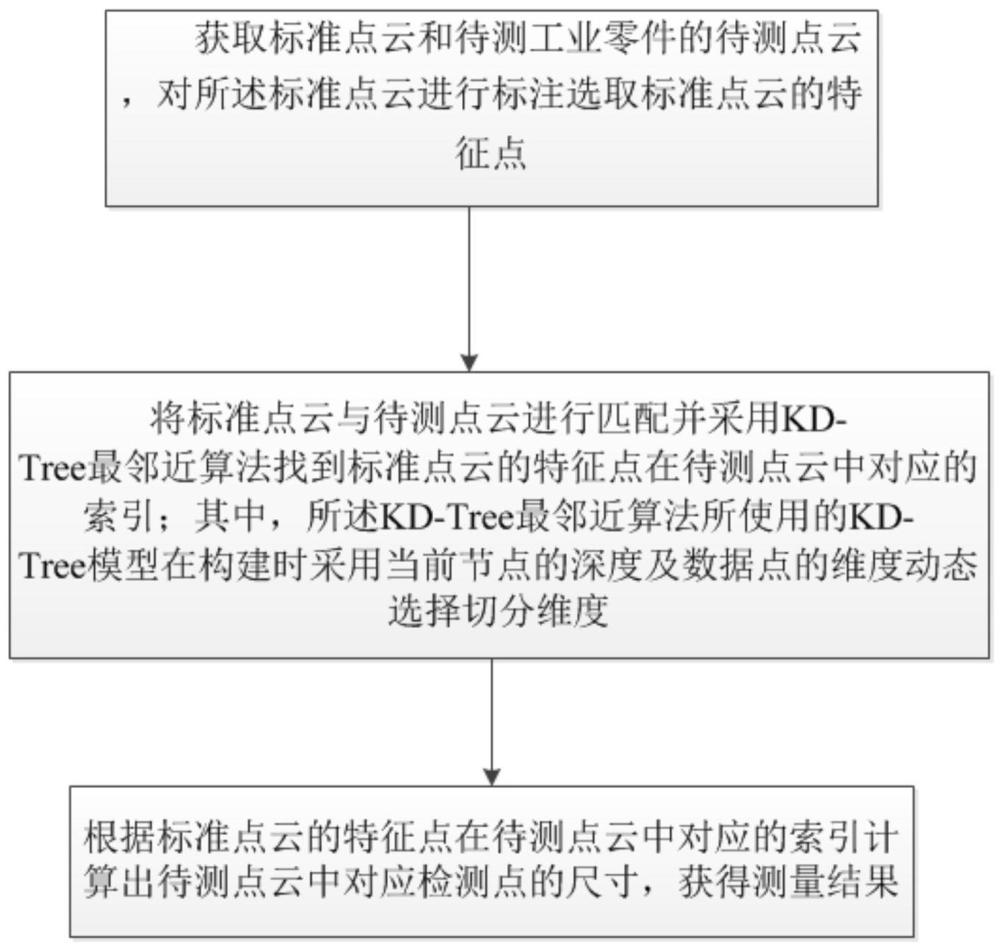
4、获取标准点云和待测工业零件的待测点云,对所述标准点云进行标注选取标准点云的特征点;
5、将标准点云与待测点云进行匹配并采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引;其中,所述kd-tree最邻近算法所使用的kd-tree模型在构建时采用当前节点的深度及数据点的维度动态选择切分维度;
6、根据标准点云的特征点在待测点云中对应的索引计算出待测点云中对应检测点的尺寸,获得测量结果。
7、进一步地,所述选择切分维度的表达式为:
8、dim=depth%k;
9、其中,dim表示当前切分的维度,depth表示当前节点的深度,k表示数据点的维度。
10、进一步地,采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引包括:
11、从根节点开始搜索最邻近点,根据目标点的坐标与当前节点的切分值进行比较,确定目标点位于当前节点的左子树还是右子树;
12、递归地沿着树向下搜索,直到到达叶子节点;在回溯的过程中,计算目标点与当前节点的距离,并记录最小距离及其对应的点;
13、判断是否需要继续搜索另一个子树;其中,如果目标点与当前节点的切分平面的距离小于最小距离,则需要搜索另一个子树,否则,不需要搜索另一个子树;
14、重复搜索,直到回溯到根节点找到标准点云中的特征点在待测点云中对应的索引。
15、进一步地,在搜索最邻近点的过程中采用欧氏距离作为度量两个点之间的距离指标;
16、所述欧式距离的计算公式为:
17、dist(p,q)=sprt((p1-q1)^2+(p2-q2)^2+...+(pk-qk)^2);
18、其中,p和q表示两个k维点,pi和qi分别表示点p和点q在第i个维度上的坐标值,k表示点的维度。
19、进一步地,所述将标准点云与待测点云进行匹配并采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引采用并行处理的方式进行,具体为:
20、将标准点云与待测点云进行分簇,获得多个子集;
21、将每个子集的标准点云与待测点云进行匹配并采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引。
22、进一步地,获取标准点云和待测工业零件的待测点云包括:
23、将标准工业零件的图纸转换为三维模型,并使用可视化软件提取点云数据集合,获得标准点云;
24、采用激光扫描仪扫描待测工业零件的表面,获取待测点云。
25、进一步地,还包括:
26、将所述测量结果进行可视化显示,并将所述测量结果和标准点云的特征点进行比较,获得误差率。
27、第二方面,本申请公开了一种工业零件尺寸测量装置,包括:
28、采集处理模块,用于获取标准点云和待测工业零件的待测点云,对所述标准点云进行标注选取标准点云的特征点;
29、查找模块,用于将标准点云与待测点云进行匹配并采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引;其中,所述kd-tree最邻近算法所使用的kd-tree模型在构建时采用当前节点的深度及数据点的维度动态选择切分维度;
30、处理模块,用于根据标准点云的特征点在待测点云中对应的索引计算出待测点云中对应检测点的尺寸,获得测量结果。
31、第三方面,本申请公开了一种计算机系统,包括:
32、存储器,用于存储指令;
33、处理器,用于执行所述指令,使得所述设备执行实现如第一方面任一项所述的方法的操作。
34、第四方面,本申请公开了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现如第一方面任一所述的方法。
35、根据上述技术方案,本发明的有益效果为:
36、本申请在测量时通过点云技术结合kd-tree最邻近算法,可以高效的匹配测量点,提高零件测量的效率、减少测量时间;在kd-tree模型在构建时采用当前节点的深度及数据点的维度动态选择切分维度相较于传统的方式,可以提高kd-tree的均衡性、适应性和空间利用率,从而提高搜索的效率。传统的方式可能会导致某些节点分支非常不平衡,从而影响搜索的效率。动态选择切分维度可以使得每个节点的子节点数量相对均衡,提高搜索的效率。同时不同维度的数据可能具有不同的分布特点,通过动态选择切分维度,可以更好地适应不同维度的数据分布,提高搜索的效率。传统的方式可能会导致某些节点的分割平面与数据分布不太匹配,从而导致部分空间没有被有效利用。动态选择切分维度可以根据数据的实际分布情况,更好地划分空间,提高空间利用率。
技术特征:
1.一种工业零件尺寸测量方法,其特征在于,包括:
2.根据权利要求1所述的工业零件尺寸测量方法,其特征在于,所述选择切分维度的表达式为:
3.根据权利要求1所述的工业零件尺寸测量方法,其特征在于,采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引包括:
4.根据权利要求3所述的工业零件尺寸测量方法,其特征在于,在搜索最邻近点的过程中采用欧氏距离作为度量两个点之间的距离指标;
5.根据权利要求1所述的工业零件尺寸测量方法,其特征在于,所述将标准点云与待测点云进行匹配并采用kd-tree最邻近算法找到标准点云的特征点在待测点云中对应的索引采用并行处理的方式进行,具体为:
6.根据权利要求1所述的工业零件尺寸测量方法,其特征在于,获取标准点云和待测工业零件的待测点云包括:
7.根据权利要求1所述的工业零件尺寸测量方法,其特征在于,还包括:
8.一种工业零件尺寸测量装置,其特征在于,包括:
9.一种计算机系统,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时,实现如权利要求1-7中任一所述的方法。
技术总结
本发明公开了一种工业零件尺寸测量方法、装置、系统及存储介质,方法包括获取标准点云和待测工业零件的待测点云,对标准点云进行标注选取标准点云的特征点;将标准点云与待测点云进行匹配并采用KD‑Tree最邻近算法找到标准点云的特征点在待测点云中对应的索引;其中,KD‑Tree最邻近算法所使用的KD‑Tree模型在构建时采用当前节点的深度及数据点的维度动态选择切分维度;根据标准点云的特征点在待测点云中对应的索引计算出待测点云中对应检测点的尺寸,获得测量结果。本申请在测量时通过点云技术结合KD‑Tree最邻近算法,可以高效的匹配测量点,提高零件测量的效率、减少测量时间。
技术研发人员:王磊,吴承泽,朱志伟,管文奇,刘子扬,唐宛,包宇豪,刘峥
受保护的技术使用者:南京邮电大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!