基于计算机视觉的鸭舍智能化监测方法与流程
本发明涉及图像数据处理,具体涉及基于计算机视觉的鸭舍智能化监测方法。
背景技术:
1、鸭舍的智能化监控系统通常用于进行实时的鸭舍状态监测、环境参数监测和安全管理功能,而鸭群的进食状态影响着鸭群整体的健康水平,因此通常需要对鸭舍进行监测。
2、现有技术中,通常通过基于计算机视觉的方法实时分析鸭舍监控图像。然而,由于鸭舍中存在大量的鸭子,鸭子之间相互影响和干扰,且每只鸭子都存在一定的性格特征,导致存在部分鸭子始终无法进食,与有强烈进食意愿的鸭子相区别,即存在较强的离群性,因此需要分析监控图像中鸭子的行为模式,识别出具有较强离群性的鸭子,对这些鸭子进行食物补充。
技术实现思路
1、本发明提供基于计算机视觉的鸭舍智能化监测方法,以解决现有的问题:鸭舍中存在大量的鸭子,鸭子之间相互影响和干扰,且每只鸭子都存在一定的性格特征,导致存在部分鸭子始终无法进食,与有强烈进食意愿的鸭子相区别,即存在较强的离群性,因此需要分析监控图像中鸭子的行为模式,识别出具有较强离群性的鸭子,对这些鸭子进行食物补充。
2、本发明的基于计算机视觉的鸭舍智能化监测方法采用如下技术方案:
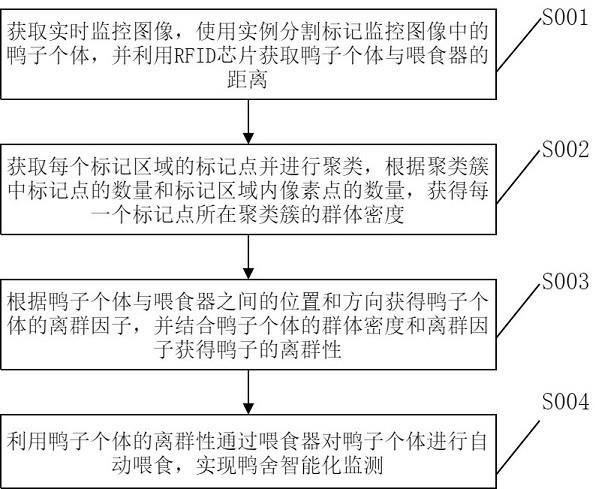
3、本发明一个实施例提供了基于计算机视觉的鸭舍智能化监测方法,该方法包括以下步骤:
4、获取鸭舍的监控图像以及鸭舍内鸭子个体与喂食器的位置和距离,通过实例分割对监控图像中的鸭子个体进行标记,得到鸭子个体对应的标记区域;
5、将任意一只鸭子个体所对应标记区域的质心记为标记点,利用k-means聚类算法对所有标记点进行聚类得到若干聚类簇,获取每个聚类簇的聚类中心,根据聚类簇中的标记点和聚类中心的距离获得聚类半径,根据标记区域内像素点的数量、聚类簇中标记点的数量以及聚类半径范围内标记点的数量,获得标记点的群体密度,每只鸭子个体对应一个群体密度;
6、将鸭子个体与距离最近的喂食器之间所对应的距离,记为鸭子个体的最近喂食距离;识别监控图像中每只鸭子个体的鸭嘴区域,根据鸭嘴区域中像素点的坐标获得鸭嘴方向;根据鸭子个体与喂食器的位置获得鸭子个体的相对位置方向,在喂食器每次打开时对应监控图像中,将鸭子个体的相对位置方向、最近喂食距离以及鸭嘴方向的融合结果记为鸭子个体的离群因子;根据群体密度和离群因子获得鸭子个体的离群性;
7、根据离群性的大小通过喂食器对鸭子个体进行食物补充。
8、进一步的,所述获取鸭舍的监控图像以及鸭舍内鸭子个体与喂食器的位置和距离,通过实例分割对监控图像中的鸭子个体进行标记,得到鸭子个体对应的标记区域,包括的具体方法为:
9、首先,利用监控摄像机俯视拍摄鸭舍的连续帧的监控图像,并使用具有鸭子识别功能的实例分割神经网络对监控图像中的鸭子个体进行标记,获得每只鸭子个体在监控图像中对应的标记区域;
10、然后,为鸭舍中每只鸭子个体的身体中植入rfid芯片,并在鸭舍中的每个喂食器中安装rfid读写器,通过rfid芯片与rfid读写器获得喂食器和每只鸭子在鸭舍中的位置以及每只鸭子与任意喂食器之间的距离。
11、进一步的,所述利用k-means聚类算法对所有标记点进行聚类得到若干聚类簇,获取每个聚类簇的聚类中心,根据聚类簇中的标记点和聚类中心的距离获得聚类半径,包括的具体方法为:
12、首先,将每个鸭子个体所对应标记区域的质心记为标记点,得到若干个标记点,一个鸭子个体对应一个标记点,利用k-means聚类算法对监控图像中的所有标记点进行聚类,获得若干个聚类簇;
13、然后,获取所有聚类簇的聚类中心,将任意一个聚类簇中标记点与聚类中心的距离最大值记为聚类簇的半径因子,将所有聚类簇的半径因子的平均值记为聚类半径。
14、进一步的,所述根据标记区域内像素点的数量、聚类簇中标记点的数量以及聚类半径范围内标记点的数量,获得标记点的群体密度,包括的具体方法为:
15、首先,获取任意聚类簇中所有标记点对应标记区域的像素点数量,记为对应聚类簇的第一数量,将聚类簇中标记点的数量记为聚类簇的第二数量;
16、然后,以聚类簇中任意一个标记点作为中心,获取在聚类半径范围内的标记点数量,记为作为中心的标记点的密度因子,每一个鸭子个体都对应一个密度因子;
17、最后,聚类簇中标记点的群体密度的具体计算方法为:
18、;
19、其中,表示第个聚类区域中第个标记点的群体密度;表示第个聚类簇的第二数量;表示第个聚类簇的第一数量;表示第个聚类区域中第个标记点的密度因子。
20、进一步的,所述识别监控图像中每只鸭子个体的鸭嘴区域,根据鸭嘴区域中像素点的坐标获得鸭嘴方向,包括的具体方法为:
21、使用yolo3图像识别网络检测监控图像中每只鸭子个体的鸭嘴区域,yolo3图像识别网络的输入为监控图像,输出为鸭嘴定位框;对鸭嘴定位框进行连通域检测并获取连通域内所有像素点的坐标,对连通域内所有像素点的坐标进行主成分分析获得连通域的主成分方向记为连通域所对应鸭子个体的鸭嘴方向。
22、进一步的,所述根据鸭子个体与喂食器的位置获得鸭子个体的相对位置方向,在喂食器每次打开时对应监控图像中,将鸭子个体的相对位置方向、最近喂食距离以及鸭嘴方向的融合结果记为鸭子个体的离群因子,包括的具体方法为:
23、首先,获取喂食器在每次打开后鸭子个体与距离最近的喂食器之间所对应的距离,记为鸭子个体的最近喂食距离,获取任意一段时间内喂食器打开的总次数,利用线性归一化方法对所有鸭子个体的最近喂食距离进行归一化处理,得到归一化最近喂食距离,获取在所述一段时间内鸭子个体的归一化最近喂食距离第一次小于预设距离参数时,喂食器对应的打开次数记为鸭子个体的条件次数;当任意鸭子个体的密度因子小于预设的密度因子阈值时,预设鸭子个体的第一权值;当鸭子个体的密度因子大于等于预设的密度因子阈值时,预设鸭子个体的第二权值;所述第一权值大于第二权值;
24、然后,在喂食器多次打开的情况下,结合最近喂食距离、鸭嘴方向以及相对位置方向,分别得到监控图像中任意一只鸭子个体的第一离群系数和第二离群系数;
25、最后,利用第一权值对第一离群系数进行乘积获得第一因子,利用第二权值对第二离群系数进行乘积获得第二因子,将第一因子和第二因子的和值记为鸭子个体的离群因子。
26、进一步的,所述第一离群系数的具体获取方法为:
27、;
28、其中,表示第一离群系数;表示喂食器在第次打开时鸭子个体的鸭嘴方向;表示喂食器在第次打开时鸭子个体的相对位置方向;表示喂食器在第次打开时鸭子个体的最近喂食距离;表示喂食器在第次打开时鸭子个体的最近喂食距离;表示鸭子个体的条件次数;表示获取绝对值。
29、进一步的,所述第二离群系数的具体获取方法为:
30、;
31、其中,表示第二离群系数;表示喂食器打开的总次数。
32、进一步的,所述根据群体密度和离群因子获得鸭子个体的离群性,包括的具体方法为:
33、将任意鸭子个体的离群因子与归一化后的群体密度的比值记为离群比值,将所有鸭子个体的离群比值进行线性归一化,将归一化结果记为鸭子个体的离群性。
34、进一步的,所述根据离群性的大小通过喂食器对鸭子个体进行食物补充,包括的具体方法为:
35、首先,将离群性大于等于预设的离群性阈值的鸭子个体标记为强离群性鸭子;
36、然后,在喂食器相邻两次打开对应的中间时刻,利用k-means聚类算法对监控图像中强离群性鸭子对应的标记点进行聚类,将得到的若干聚类簇记为强离群聚类簇,打开监控图像中距离每个强离群聚类簇的聚类中心最近的喂食器,以对强离群性鸭子进行食物补充。
37、本发明的技术方案的有益效果是:通过对监控图像中鸭子个体对应的标记点进行聚类,初步根据标记点之间的距离将鸭子个体划分为所属的聚类簇中,根据鸭子个体在聚类簇中的位置以及鸭子个体在一定范围内其他鸭子个体的数量,获得反映鸭子个体远离群体的程度特征即鸭子个体的群体密度;另外,结合监控图像中反映鸭子的视线方向的鸭嘴方向和鸭子个体与喂食器的相对方向,获得反映鸭子个体进食意愿的离群因子,结合鸭子个体的群体密度和离群因子对监控图像中的鸭子个体进行标签化,通过对监控图像中的鸭子个体行为模式的智能化分析,提高了通过喂食器对鸭子个体进行食物补充时的精准化程度,实现自动喂食,减少人工干预,提高了鸭舍的管理效率和安全性,且具有较高的自动化程度。
- 还没有人留言评论。精彩留言会获得点赞!