摄像头的位姿估计方法及装置、存储介质和电子设备与流程
本技术涉及计算机视觉领域,具体而言,涉及一种摄像头的位姿估计方法及装置、存储介质和电子设备。
背景技术:
1、在输电系统中,通常需要使用摄像头对输电通道进行监控,从而预防潜在的风险,保证电力供应的连续性和安全性。为了实现对输电通道内摄像头朝向姿态的控制,准确巡视输电通道内电气元件的运行状态,需要确定摄像头的外部参数信息,从而实现对摄像头的位姿进行估计,而在相关技术中,通常根据输电通道内摄像头所拍摄的视频图像的像素亮度信息对摄像头进行位姿估计,但由于不同摄像头的曝光不同,导致不同摄像头拍摄到的图像亮度存在一定的差异,从而导致对摄像头进行位姿估计的准确性比较低的问题。
2、针对相关技术中根据输电通道内摄像头拍摄到的图像的像素亮度信息对摄像头进行位姿估计时,由于不同摄像头拍摄到的图像亮度存在差异,导致对摄像头进行位姿估计的准确性比较低的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术的主要目的在于提供一种摄像头的位姿估计方法及装置、存储介质和电子设备,以解决相关技术中根据输电通道内摄像头拍摄到的图像的像素亮度信息对摄像头的进行位姿估计时,由于不同摄像头拍摄到的图像亮度存在差异,导致对摄像头进行位姿估计的准确性比较低的问题。
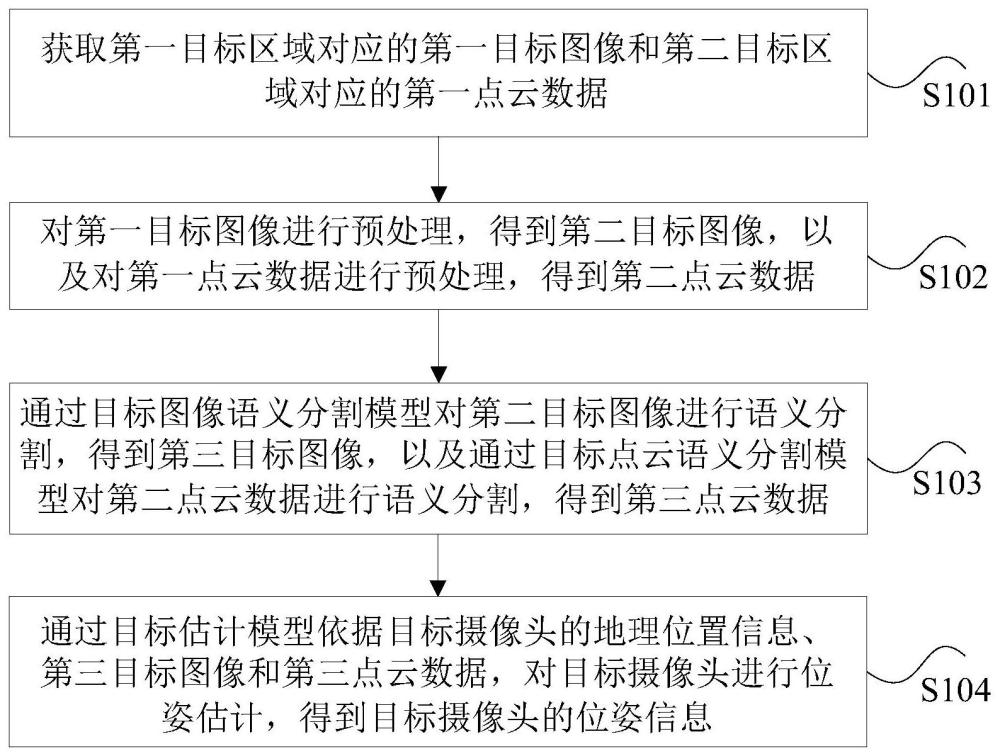
2、为了实现上述目的,根据本技术的一个方面,提供了一种摄像头的位姿估计方法。该方法包括:获取第一目标区域对应的第一目标图像和第二目标区域对应的第一点云数据,其中,所述第一目标区域为目标摄像头的拍摄区域,所述第二目标区域为所述目标摄像头所在的输电通道的区域;对所述第一目标图像进行预处理,得到第二目标图像,以及对所述第一点云数据进行预处理,得到第二点云数据;通过目标图像语义分割模型对所述第二目标图像进行语义分割,得到第三目标图像,以及通过目标点云语义分割模型对所述第二点云数据进行语义分割,得到第三点云数据;通过目标估计模型依据所述目标摄像头的地理位置信息、所述第三目标图像和所述第三点云数据,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息。
3、进一步地,对所述第一目标图像进行预处理,得到第二目标图像包括:对所述第一目标图像进行缩小处理,得到目标尺寸的第一目标图像;对所述目标尺寸的第一目标图像进行滤波处理,得到滤波后的第一目标图像;对所述滤波后的第一目标图像中的目标对象进行标注,得到所述第二目标图像。
4、进一步地,通过目标估计模型依据所述目标摄像头的地理位置信息、所述第三目标图像和所述第三点云数据,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息包括:依据所述第一目标区域,对所述第三点云数据进行裁剪,得到第四点云数据;依据所述目标摄像头的地理位置信息,对所述第四点云数据进行投影,得到点云数据投影图;通过所述目标估计模型依据所述点云数据投影图和所述第三目标图像,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息。
5、进一步地,通过所述目标估计模型依据所述点云数据投影图和所述第三目标图像,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息包括:建立所述点云数据投影图中的点和所述第三目标图像中像素点之间的对应关系;通过所述目标估计模型依据所述对应关系,将所述点云数据投影图中的点映射到所述第三目标图像中对应的像素点中,得到目标矩阵;依据所述目标矩阵,确定所述目标摄像头的位姿信息。
6、进一步地,在通过目标图像语义分割模型对所述第二目标图像进行语义分割,得到分割后的第三目标图像之前,所述方法还包括:获取训练样本集,其中,所述训练样本集中至少包括第一训练图像、第一训练点云数据和所述第一训练图像对应的真实位姿信息,所述第一训练图像为训练摄像头的拍摄区域对应的图像,第一训练点云数据为所述训练摄像头所在输电通道区域的点云数据;对所述第一训练图像进行预处理,得到第二训练图像,以及对所述第一训练点云数据进行预处理,得到第二训练点云数据;依据所述第二训练图像对初始图像语义分割模型进行训练,得到所述目标图像语义分割模型,以及依据所述第二训练点云数据,对初始点云语义分割模型进行训练,得到所述目标点云语义分割模型。
7、进一步地,在依据所述第二训练点云数据,对初始点云语义分割模型进行训练,得到所述目标点云语义分割模型之后,所述方法还包括:通过所述目标图像语义分割模型对所述第二训练图像进行分割,得到第三训练图像;通过目标点云语义分割模型对所述第二训练点云数据进行分割,得到第三训练点云数据;依据所述第三训练图像和所述第三训练点云数据,对初始估计模型进行训练,得到所述目标估计模型。
8、进一步地,依据所述第三训练图像和所述第三训练点云数据,对初始估计模型进行训练,得到所述目标估计模型包括:通过所述初始估计模型依据所述第三训练图像和所述第三训练点云数据,对所述训练摄像头进行位姿估计,得到所述训练摄像头的预测位姿信息;依据所述真实位姿信息和所述预测位姿信息,确定所述初始估计模型的目标损失函数;依据所述目标损失函数,对所述初始估计模型进行训练,得到目标估计模型。
9、为了实现上述目的,根据本技术的另一方面,提供了一种摄像头的位姿估计装置。该装置包括:第一获取单元,用于获取第一目标区域对应的第一目标图像和第二目标区域对应的第一点云数据,其中,所述第一目标区域为目标摄像头的拍摄区域,所述第二目标区域为所述目标摄像头所在的输电通道的区域;第一预处理单元,用于对所述第一目标图像进行预处理,得到第二目标图像,以及对所述第一点云数据进行预处理,得到第二点云数据;第一分割单元,用于通过目标图像语义分割模型对所述第二目标图像进行语义分割,得到第三目标图像,以及通过目标点云语义分割模型对所述第二点云数据进行语义分割,得到第三点云数据;估计单元,用于通过目标估计模型依据所述目标摄像头的地理位置信息、所述第三目标图像和所述第三点云数据,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息。
10、进一步地,第一预处理单元包括:处理模块,用于对所述第一目标图像进行缩小处理,得到目标尺寸的第一目标图像;滤波模块,用于对所述目标尺寸的第一目标图像进行滤波处理,得到滤波后的第一目标图像;标注模块,用于对所述滤波后的第一目标图像中的目标对象进行标注,得到所述第二目标图像。
11、进一步地,估计单元包括:裁剪模块,用于依据所述第一目标区域,对所述第三点云数据进行裁剪,得到第四点云数据;投影模块,用于依据所述目标摄像头的地理位置信息,对所述第四点云数据进行投影,得到点云数据投影图;第一估计模块,用于通过所述目标估计模型依据所述点云数据投影图和所述第三目标图像,对所述目标摄像头进行位姿估计,得到所述目标摄像头的位姿信息。
12、进一步地,第一估计模块包括:建立子模块,用于建立所述点云数据投影图中的点和所述第三目标图像中像素点之间的对应关系;映射子模块,用于通过所述目标估计模型依据所述对应关系,将所述点云数据投影图中的点映射到所述第三目标图像中对应的像素点中,得到目标矩阵;确定子模块,用于依据所述目标矩阵,确定所述目标摄像头的位姿信息。
13、进一步地,所述装置还包括:第二获取单元,用于获取训练样本集,其中,所述训练样本集中至少包括第一训练图像、第一训练点云数据和所述第一训练图像对应的真实位姿信息,所述第一训练图像为训练摄像头的拍摄区域对应的图像,第一训练点云数据为所述训练摄像头所在输电通道区域的点云数据;第二预处理单元,用于对所述第一训练图像进行预处理,得到第二训练图像,以及对所述第一训练点云数据进行预处理,得到第二训练点云数据;第一训练单元,用于依据所述第二训练图像对初始图像语义分割模型进行训练,得到所述目标图像语义分割模型,以及依据所述第二训练点云数据,对初始点云语义分割模型进行训练,得到所述目标点云语义分割模型。
14、进一步地,所述装置还包括:第二分割单元,用于通过所述目标图像语义分割模型对所述第二训练图像进行分割,得到第三训练图像;第三分割单元,用于通过目标点云语义分割模型对所述第二训练点云数据进行分割,得到第三训练点云数据;第二训练单元,用于依据所述第三训练图像和所述第三训练点云数据,对初始估计模型进行训练,得到所述目标估计模型。
15、进一步地,第二训练单元包括:第二估计模块,用于通过所述初始估计模型依据所述第三训练图像和所述第三训练点云数据,对所述训练摄像头进行位姿估计,得到所述训练摄像头的预测位姿信息;确定模块,用于依据所述真实位姿信息和所述预测位姿信息,确定所述初始估计模型的目标损失函数;训练模块,用于依据所述目标损失函数,对所述初始估计模型进行训练,得到目标估计模型。
16、为了实现上述目的,根据本技术的一方面,提供了一种计算机可读存储介质,所述存储介质存储程序,其中,在所述程序运行时控制所述存储介质所在设备执行上述任意一项所述的摄像头的位姿估计方法。
17、为了实现上述目的,根据本技术的另一个方面,还提供了一种电子设备,电子设备包括一个或多个处理器和存储器,存储器用于存储一个或多个处理器实现上述任意一项所述的摄像头的位姿估计方法。
18、通过本技术,采用以下步骤:获取第一目标区域对应的第一目标图像和第二目标区域对应的第一点云数据,其中,第一目标区域为目标摄像头的拍摄区域,第二目标区域为目标摄像头所在的输电通道的区域;对第一目标图像进行预处理,得到第二目标图像,以及对第一点云数据进行预处理,得到第二点云数据;通过目标图像语义分割模型对第二目标图像进行语义分割,得到第三目标图像,以及通过目标点云语义分割模型对第二点云数据进行语义分割,得到第三点云数据;通过目标估计模型依据目标摄像头的地理位置信息、第三目标图像和第三点云数据,对目标摄像头进行位姿估计,得到目标摄像头的位姿信息,解决了相关技术中根据输电通道内摄像头拍摄到的图像的像素亮度信息对摄像头的进行位姿估计时,由于不同摄像头拍摄到的图像亮度存在差异,导致对摄像头进行位姿估计的准确性比较低的问题。在本技术中,避免了根据输电通道内摄像头拍摄到的图像的像素亮度信息对摄像头的进行位姿估计,导致对目标摄像头的位姿估计准确度比较低的问题,实现了通过目标估计模型对目标摄像头进行位姿估计的目的,进而达到了提高对目标摄像头进行位姿估计准确性的效果。
- 还没有人留言评论。精彩留言会获得点赞!