点云融合方法、装置、电子设备以及存储介质与流程
本申请涉及计算机视觉,尤其涉及一种点云融合方法、装置、电子设备以及存储介质。
背景技术:
1、点云融合是重建三维模型的重要环节,但是现有的点云融合方法主要适用于刚体距离场。但是在实际中,在扫描的过程中,被扫描环境经常表现为非刚体距离场。例如,因被扫描的事物位置和/或姿态变化,或者被扫描的物体表面发生形变,导致被扫描环境表现为非刚体距离场。目前,缺乏适用于非刚体距离场的实时点云融合方法。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本申请提供了一种点云融合方法、装置、电子设备以及存储介质。
2、第一方面,本申请提供了一种点云融合方法,包括:
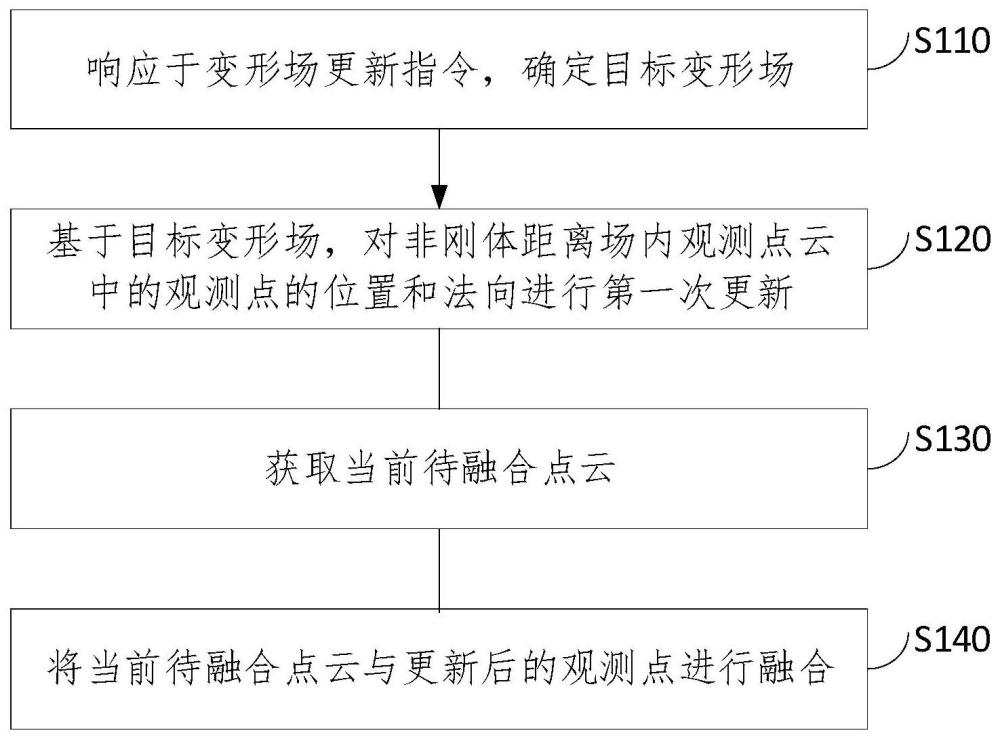
3、响应于变形场更新指令,确定目标变形场;
4、基于所述目标变形场,对非刚体距离场内观测点云中的观测点的位置和法向进行更新;
5、获取当前待融合点云;
6、将所述当前待融合点云与更新后的所述观测点进行融合。
7、第二方面,本申请还提供了一种点云融合装置,包括:
8、目标变形场确定模块,用于响应于变形场更新指令,确定目标变形场;
9、更新模块,用于基于所述目标变形场,对非刚体距离场内观测点云中的观测点的位置和法向进行更新;
10、待融合点云获取模块,用于获取当前待融合点云;
11、融合模块,用于将所述当前待融合点云与更新后的所述观测点进行融合。
12、第三方面,本申请还提供了一种电子设备,包括:处理器和存储器;
13、处理器通过调用存储器存储的程序或指令,用于执行上述任一方法的步骤。
14、第四方面,本申请还提供了一种计算机可读存储介质,计算机可读存储介质存储程序或指令,程序或指令使计算机执行上述任一方法的步骤。
15、本申请实施例提供的技术方案与现有技术相比具有如下优点:
16、本申请实施例提供的技术方案通过设置响应于变形场更新指令,确定目标变形场;基于所述目标变形场,对非刚体距离场内观测点云中的观测点的位置和法向进行更新;获取当前待融合点云;将所述当前待融合点云与更新后的所述观测点进行融合,其本质是在融合的过程中,根据目标变形场,不断对已融合的点云的位置和法向进行更新,使得已融合的点云点始终处于最新的零值面上,其适用于非刚体距离场的实时点云融合,可以提高点云融合的准确性。
技术特征:
1.一种点云融合方法,其特征在于,包括:
2.根据权利要求1所述的点云融合方法,其特征在于,所述基于所述目标变形场,对所述非刚体距离场内的观测点云中的观测点的位置和法向进行更新,包括:
3.根据权利要求1所述的点云融合方法,其特征在于,所述将所述当前待融合点云与更新后的所述观测点进行融合之前,还包括:
4.根据权利要求1所述的点云融合方法,其特征在于,所述将所述当前待融合点云与更新后的所述观测点进行融合,包括:
5.根据权利要求4所述的点云融合方法,其特征在于,所述根据所述当前待融合点云与更新后的所述观测点云,更新零值面,包括:
6.根据权利要求5所述的点云融合方法,其特征在于,还包括:
7.根据权利要求5所述的点云融合方法,其特征在于,所述将所述待融合点以及所述观测点移动至更新后的零值面上之后,还包括:
8.一种点云融合装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:处理器和存储器;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行如权利要求1至7任一项所述方法的步骤。
技术总结
本申请涉及一种点云融合方法、装置、电子设备以及存储介质,方法包括:响应于变形场更新指令,确定目标变形场;基于所述目标变形场,对非刚体距离场内观测点云中的观测点的位置和法向进行更新;获取当前待融合点云;将所述当前待融合点云与更新后的所述观测点进行融合。其本质是在融合的过程中,根据目标变形场,不断对已融合的点云的位置和法向进行更新,使得已融合的点云点始终处于最新的零值面上,其适用于非刚体距离场的实时点云融合,可以提高点云融合的准确性。
技术研发人员:赵斌涛,江腾飞,张健,贾勇杰,林忠威,刘雨
受保护的技术使用者:先临三维科技股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!