一种基于航拍技术的施工进度管控方法及系统与流程
本发明涉及施工进度管控,特别涉及一种基于航拍技术的施工进度管控方法及系统。
背景技术:
1、传统项目管理基于现场摄像头进行进度拍摄,但是由于拍摄角度与摄像设备摆放位子原因导致摄像范围有限,且随着工地进度不断推进,建设现场工地范围与楼层不断拔高,摄像头局限性就显现出来,摄像头的视野有限,容易造成一些盲区,无法完全覆盖所有监控区域,从而影响监控全面性。
2、现有技术当中,随着无人机技术的发展,利用无人机航拍技术实现施工进度监测,可以保证监控全面性的同时,保证监控全面性,但基于管控方面主要还是通过手动比对匹配相关施工情况,容易出现差错,且管控效果不佳。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种基于航拍技术的施工进度管控方法及系统,旨在解决现有技术中,管控效果不佳的技术问题。
2、为了实现上述目的,本发明是通过如下技术方案来实现的:一种基于航拍技术的施工进度管控方法,包括以下步骤:
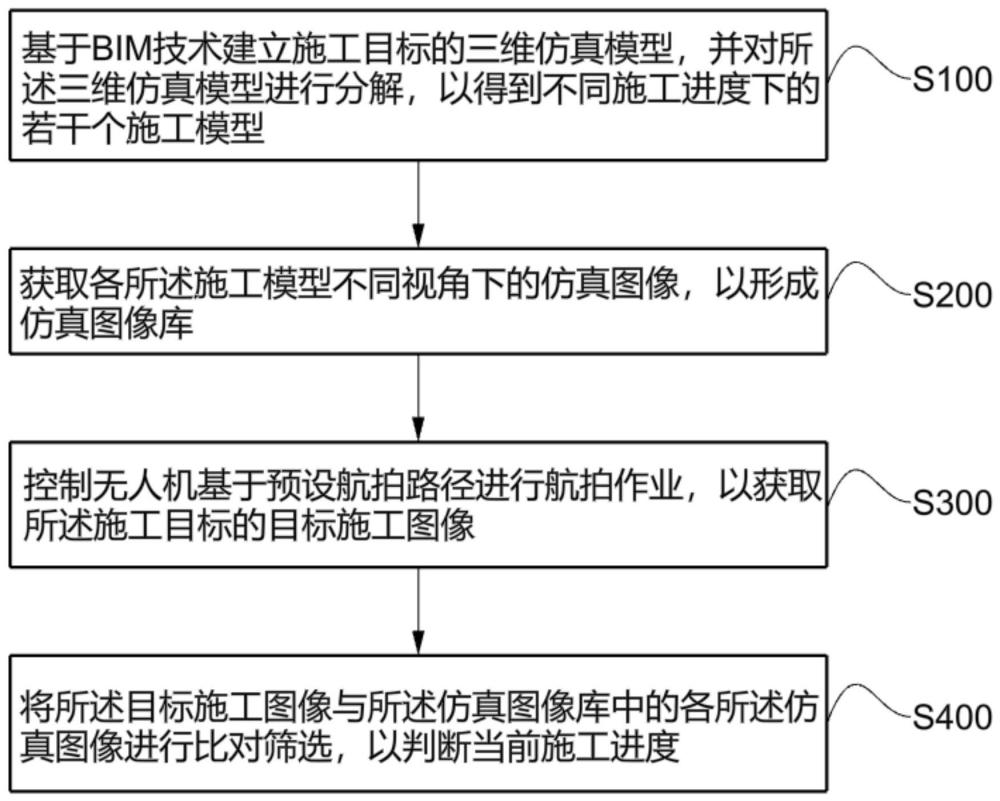
3、基于bim技术建立施工目标的三维仿真模型,并对所述三维仿真模型进行分解,以得到不同施工进度下的若干个施工模型;
4、获取各所述施工模型不同视角下的仿真图像,以形成仿真图像库;
5、控制无人机基于预设航拍路径进行航拍作业,以获取所述施工目标的目标施工图像;
6、将所述目标施工图像与所述仿真图像库中的各所述仿真图像进行比对筛选,以判断当前施工进度。
7、根据上述技术方案的一方面,获取各所述施工模型不同视角下的仿真图像,以形成仿真图像库的步骤具体包括:
8、获取各所述施工模型不同视角下的仿真图像,并从各所述仿真图像中将相似度超出预设值的图像进行筛除,以形成仿真图像库。
9、根据上述技术方案的一方面,控制无人机基于预设航拍路径进行航拍作业,以获取所述施工目标的目标施工图像的步骤具体包括:
10、控制无人机基于第一预设航拍路径进行航拍作业,以获取所述施工目标的第一施工图像;
11、将所述第一施工图像与上一施工进度对应的第二施工图像进行对比,判断所述第一施工图像与所述第二施工图像的相似度是否小于预设值;
12、若所述第一施工图像与所述第二施工图像的相似度小于预设值,则将所述第一施工图像作为目标施工图像。
13、根据上述技术方案的一方面,所述方法还包括:
14、若所述第一施工图像与所述第二施工图像的相似度大于预设值;
15、控制所述无人机基于第二预设航拍路径进行航拍作业,以获取所述施工目标的第三施工图像,并将所述第三施工图像作为目标施工图像。
16、根据上述技术方案的一方面,将所述目标施工图像与所述仿真图像库中的各所述仿真图像进行比对筛选的步骤之前,所述方法还包括:
17、基于以下计算式得到二值化阈值,并基于所述二值化阈值对所述目标施工图像进行二值化处理:
18、t=γ1×γ2×(μ1-μ2)2;
19、式中,γ1和μ1分别为施工目标对应的像素数的图像占比,以及其平均灰度;γ2和μ2分别为背景对应的像素数的图像占比,以及其平均灰度。
20、另一方面,本申请还提供了一种基于航拍技术的施工进度监管系统,包括:
21、模型模块,用于基于bim技术建立施工目标的三维仿真模型,并对所述三维仿真模型进行分解,以得到不同施工进度下的若干个施工模型;
22、图像模块,用于获取各所述施工模型不同视角下的仿真图像,以形成仿真图像库;
23、航拍模块,用于控制无人机基于预设航拍路径进行航拍作业,以获取所述施工目标的目标施工图像;
24、比对模块,用于将所述目标施工图像与所述仿真图像库中的各所述仿真图像进行比对筛选,以判断当前施工进度。
25、根据上述技术方案的一方面,所述图像模块具体用于:
26、获取各所述施工模型不同视角下的仿真图像,并从各所述仿真图像中将相似度超出预设值的图像进行筛除,以形成仿真图像库。
27、根据上述技术方案的一方面,所述航拍模块具体用于:
28、控制无人机基于第一预设航拍路径进行航拍作业,以获取所述施工目标的第一施工图像;
29、将所述第一施工图像与上一施工进度对应的第二施工图像进行对比,判断所述第一施工图像与所述第二施工图像的相似度是否小于预设值;
30、若所述第一施工图像与所述第二施工图像的相似度小于预设值,则将所述第一施工图像作为目标施工图像。
31、根据上述技术方案的一方面,所述航拍模块还用于:
32、若所述第一施工图像与所述第二施工图像的相似度大于预设值;
33、控制所述无人机基于第二预设航拍路径进行航拍作业,以获取所述施工目标的第三施工图像,并将所述第三施工图像作为目标施工图像。
34、根据上述技术方案的一方面,所述系统还包括:
35、处理模块,用于基于以下计算式得到二值化阈值,并基于所述二值化阈值对所述目标施工图像进行二值化处理:
36、t=γ1×γ2×(μ1-μ2)2;
37、式中,γ1和μ1分别为施工目标对应的像素数的图像占比,以及其平均灰度;γ2和μ2分别为背景对应的像素数的图像占比,以及其平均灰度。
38、与现有技术相比,本发明的有益效果在于:通过基于bim技术建立对应施工目标的三维仿真模型,并基于其不同施工进度对模型进行分解,得到各施工状态下的若干个施工模型,获取各施工模型不用视角下的仿真图像,以形成包含各施工进度下的仿真图像的仿真图像库,然后通过控制无人机基于预设航拍路径进行航拍作业,以获取施工目标的目标施工图像,通过将目标施工图像与各仿真图像进行比对,以此自动并快速判断当前施工进度,提高管控效率的同时,保证管控效果。
技术特征:
1.一种基于航拍技术的施工进度管控方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于航拍技术的施工进度管控方法,其特征在于,获取各所述施工模型不同视角下的仿真图像,以形成仿真图像库的步骤具体包括:
3.根据权利要求1所述的基于航拍技术的施工进度管控方法,其特征在于,控制无人机基于预设航拍路径进行航拍作业,以获取所述施工目标的目标施工图像的步骤具体包括:
4.根据权利要求3所述的基于航拍技术的施工进度管控方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的基于航拍技术的施工进度管控方法,其特征在于,将所述目标施工图像与所述仿真图像库中的各所述仿真图像进行比对筛选的步骤之前,所述方法还包括:
6.一种基于航拍技术的施工进度监管系统,其特征在于,包括:
7.根据权利要求6所述的基于航拍技术的施工进度监管系统,其特征在于,所述图像模块具体用于:
8.根据权利要求7所述的基于航拍技术的施工进度监管系统,其特征在于,所述航拍模块具体用于:
9.根据权利要求8所述的基于航拍技术的施工进度监管系统,其特征在于,所述航拍模块还用于:
10.根据权利要求6所述的基于航拍技术的施工进度管控系统,其特征在于,所述系统还包括:
技术总结
本发明提供一种基于航拍技术的施工进度管控方法及系统,该方法包括以下步骤:基于BIM技术建立施工目标的三维仿真模型,并对三维仿真模型进行分解,以得到不同施工进度下的若干个施工模型;获取各施工模型不同视角下的仿真图像,以形成仿真图像库;控制无人机基于预设航拍路径进行航拍作业,以获取施工目标的目标施工图像;将目标施工图像与仿真图像库中的各仿真图像进行比对筛选,以判断当前施工进度。通过控制无人机基于预设航拍路径进行航拍作业,以获取施工目标的目标施工图像,通过将目标施工图像与各仿真图像进行比对,以此自动并快速判断当前施工进度,提高管控效率的同时,保证管控效果。
技术研发人员:张利,吴限,陆霜霜,余伟,邹涛,陈长松
受保护的技术使用者:九江数字产业发展有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!