一种驾驶场景的分类方法、装置、电子设备及存储介质与流程
本技术一个或多个实施例涉及数据处理领域,尤其涉及一种驾驶场景的分类方法、装置、电子设备及存储介质。
背景技术:
1、自动驾驶仿真技术是指在计算机中构建虚拟驾驶环境来模拟自动驾驶车辆在现实世界中的驾驶行为和驾驶情境,以此评估自动驾驶算法的性能。为了能够实现对自动驾驶算法性能的全面评估,虚拟驾驶环境应当尽可能地覆盖实际驾驶过程中的各种驾驶场景。通常,可以利用采集车之类的采集实体采集驾驶路测采集数据,以用于构建虚拟驾驶环境。由于采集的驾驶路测采集数据通常是海量的,而这些海量数据所对应的驾驶场景也多种多样,因此需要基于采集到的驾驶路测采集数据对驾驶场景进行分类,以便于开发/测试人员提取特定驾驶场景的驾驶路测采集数据进行车辆自动驾驶测试。
2、相关技术中,采用简单的二分类或多分类模型基于驾驶路测采集数据对驾驶场景进行分类,然而这种分类方式通常不够精细。比如,当某一场景的驾驶路测采集数据中包括多个维度的信息时,该场景会对应多个维度的分类结果。而二分类或多分类模型往往仅能识别出该场景在某一维度的分类结果,难以实现对该场景的准确分类。
技术实现思路
1、本技术提供一种驾驶场景的分类方法、装置、电子设备及存储介质,以解决相关技术中的不足。
2、根据本技术一个或多个实施例的第一方面,提供一种驾驶场景的分类方法,该方法包括:
3、获取车辆在待分类的任一驾驶场景下的驾驶路测采集数据;
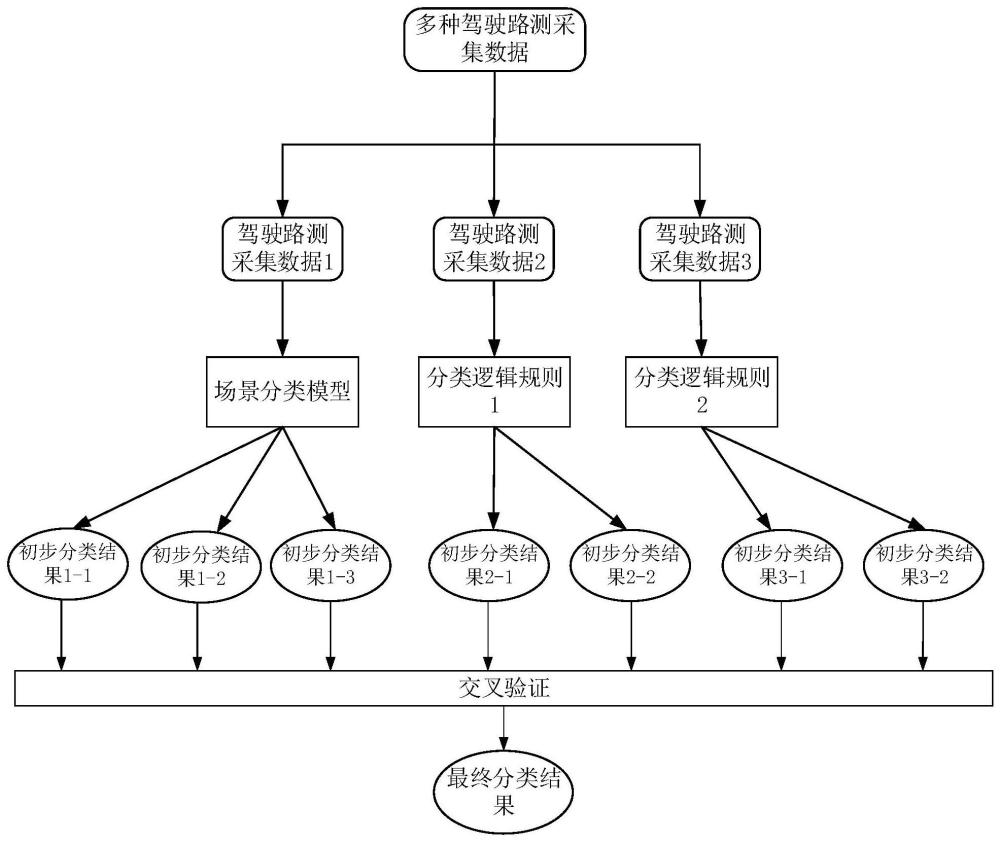
4、在所述驾驶路测采集数据的数量为至少两种的情况下,按照所述至少两种驾驶路测采集数据分别对应的分类规则对各种驾驶路测采集数据分别进行分类处理,以得到所述至少两种驾驶路测采集数据分别对应的初步分类结果,其中,所述至少两种驾驶路测采集数据中的至少一种驾驶路测采集数据包括传感器采集的原始数据,且任一种驾驶路测采集数据对应的分类规则匹配于该种驾驶路测采集数据的数据种类;
5、对所述至少两种驾驶路测采集数据分别对应的初步分类结果进行交叉验证,并根据验证结果确定所述任一驾驶场景的最终分类结果。
6、可选的,所述至少两种驾驶路测采集数据中的任一种驾驶路测采集数据,对应于同一种类型的传感器。
7、可选的,所述分类规则包括训练完成的场景分类模型,和/或,分类逻辑规则。
8、可选的,在所述至少两种驾驶路测采集数据包括图像数据和至少一种其他数据且所述分类规则包括所述训练完成的场景分类模型和所述分类逻辑规则的情况下,所述按照所述至少两种驾驶路测采集数据分别对应的分类规则对各种驾驶路测采集数据分别进行分类处理,包括:采用所述场景分类模型对所述图像数据进行分类处理;以及,采用所述分类逻辑规则对所述至少一种其他数据进行分类处理。
9、可选的,所述分类规则包括所述场景分类模型,获取所述车辆在待分类的任一场景下采集到的任一种驾驶路测采集数据,包括:在所述驾驶场景的分类方法应用于所述车辆且所述任一种驾驶路测采集数据对应的场景分类模型部署在所述车辆本地的情况下,获取所述车辆采集到的所述任一种驾驶路测采集数据;或者,在所述驾驶场景的分类方法应用于服务端且所述任一种驾驶路测采集数据对应的场景分类模型部署在所述服务端的情况下,从数据库中获取所述任一种驾驶路测采集数据,其中,所述任一种驾驶路测采集数据由所述车辆采集并提交至所述数据库。
10、可选的,所述场景分类模型包括特征提取模块和多维度分类模块,所述多维度分类模块包括与各维度一一对应的至少两个分类器;在任一种驾驶路测采集数据对应的分类规则为所述场景分类模型的情况下,按照所述场景分类模型对该任一种驾驶路测采集数据进行分类处理,以得到该任一种驾驶路测采集数据对应的初步分类结果,包括:基于所述特征提取模块提取所述任一种驾驶路测采集数据的场景特征;基于所述多维度分类模块对所述场景特征进行分类,生成所述任一种驾驶路测采集数据分别在至少两个不同维度的分类结果;整合所述任一种驾驶路测采集数据分别在至少两个不同维度的分类结果,得到所述任一种驾驶路测采集数据对应的初步分类结果。
11、可选的,所述至少两种驾驶路测采集数据分别对应的初步分类结果包括下述至少之一:环境维度的分类结果、路况维度的分类结果、车辆自身行为维度的分类结果、车辆交互对象维度的分类结果。
12、可选的,所述至少两种驾驶路测采集数据还包括利用训练完成的车端模型对所述传感器采集的原始感知数据进行预分类处理得到的所述任一驾驶场景的预分类结果;所述对所述至少两种驾驶路测采集数据分别对应的初步分类结果进行交叉验证,并根据验证结果确定所述任一驾驶场景的最终分类结果,包括:对所述预分类结果和除所述预分类结果外的其他各种驾驶路测采集数据分别对应的初步分类结果进行交叉验证,并根据验证结果确定所述最终分类结果;和/或,所述至少两种驾驶路测采集数据还包括所述传感器采集的原始感知数据中至少一种原始感知数据对应的预处理数据,其中,所述预处理数据由训练完成的车端模型对所述至少一种原始感知数据进行预处理得到;所述按照所述至少两种驾驶路测采集数据分别对应的分类规则对各种驾驶路测采集数据分别进行分类处理,包括:针对任一种预处理数据,按照该种预处理数据对应的分类规则对该种预处理数据进行分类处理。
13、可选的,所述至少两种驾驶路测采集数据还包括从云端获取的所述车辆在所述任一驾驶场景下的远程驾驶路测采集数据;所述按照所述至少两种驾驶路测采集数据分别对应的分类规则对各种驾驶路测采集数据分别进行分类处理,包括:针对任一种远程驾驶路测采集数据,按照该种远程驾驶路测采集数据对应的分类规则对该种远程驾驶路测采集数据进行分类处理。
14、可选的,所述方法还包括:在所述驾驶路测采集数据的数量为一种的情况下,按照该种驾驶路测采集数据对应的分类规则对该种驾驶路测采集数据进行分类处理,以得到该种驾驶路测采集数据对应的初步分类结果;将所述该种驾驶路测采集数据对应的初步分类结果作为所述任一驾驶场景的最终分类结果。
15、可选的,所述方法还包括:将所述驾驶路测采集数据和所述最终分类结果作为所述任一驾驶场景对应的库成员添加至驾驶场景库,所述驾驶场景库的各个库成员被按照所述最终分类结果提取后作为用于车辆自动驾驶测试的测试样本。
16、根据本技术一个或多个实施例的第二方面,提供一种驾驶场景的分类装置,该装置包括:
17、数据获取单元,用于获取车辆在待分类的任一驾驶场景下的驾驶路测采集数据;
18、场景分类单元,用于在所述驾驶路测采集数据的数量为至少两种的情况下,按照所述至少两种驾驶路测采集数据分别对应的分类规则对各种驾驶路测采集数据分别进行分类处理,以得到所述至少两种驾驶路测采集数据分别对应的初步分类结果,其中,所述至少两种驾驶路测采集数据中的至少一种驾驶路测采集数据包括传感器采集的原始数据,且任一种驾驶路测采集数据对应的分类规则匹配于该种驾驶路测采集数据的数据种类;
19、结果整合单元,用于对所述至少两种驾驶路测采集数据分别对应的初步分类结果进行交叉验证,并根据验证结果确定所述任一驾驶场景的最终分类结果。
20、根据本技术一个或多个实施例的第三方面,提供一种电子设备,包括:
21、处理器;
22、用于存储处理器可执行指令的存储器;
23、其中,所述处理器通过运行所述可执行指令以实现如上述第一方面的实施例中所述的方法。
24、根据本技术一个或多个实施例的第四方面,提供一种计算机可读存储介质,其上存储有计算机指令,该指令被处理器执行时实现如上述第一方面的实施例中所述方法的步骤。
25、由以上技术方案可见,本技术一个或多个实施例中,针对待分类场景的每一种驾驶路测采集数据,采用与该驾驶路测采集数据的数据种类相匹配的分类规则对该驾驶路测采集数据进行分类处理,从而能够得到多种驾驶路测采集数据分别对应的初步分类结果。然后对多种驾驶路测采集数据分别对应的初步分类结果进行整合,得到待分类场景的最终分类结果。此种分类方式按照驾驶路测采集数据的不同种类从多种维度分别对待分类场景进行分类得到初步分类结果,然后对各个初步分类结果进行整合得到最终分类结果。上述整合过程本质上是对各个初步分类结果进行交叉验证,可以从多种维度分析待分类场景的属性,进而提升最终分类结果的准确性和鲁棒性。
26、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!