基于无人机航拍影像数据的实时三维建模方法及系统
本发明涉及三维建模,尤其是基于无人机航拍影像数据的实时三维建模方法及系统。
背景技术:
1、随着三维建模技术的发展,其应用领域已经扩展到土地、森林、资源调查等多个领域。为了获取准确的建模数据,通常会利用无人机进行航拍来采集图像信息,然而,目前的航拍流程存在一些问题。
2、传统的航拍流程是在航拍结束后进行数据处理,这就意味着航拍过程中拍摄的图像数据往往存在遗漏,从而导致建模结果不准确。
技术实现思路
1、本发明为了解决上述存在的技术问题,提供基于无人机航拍影像数据的实时三维建模方法及系统。
2、本发明的技术方案是这样实现的:
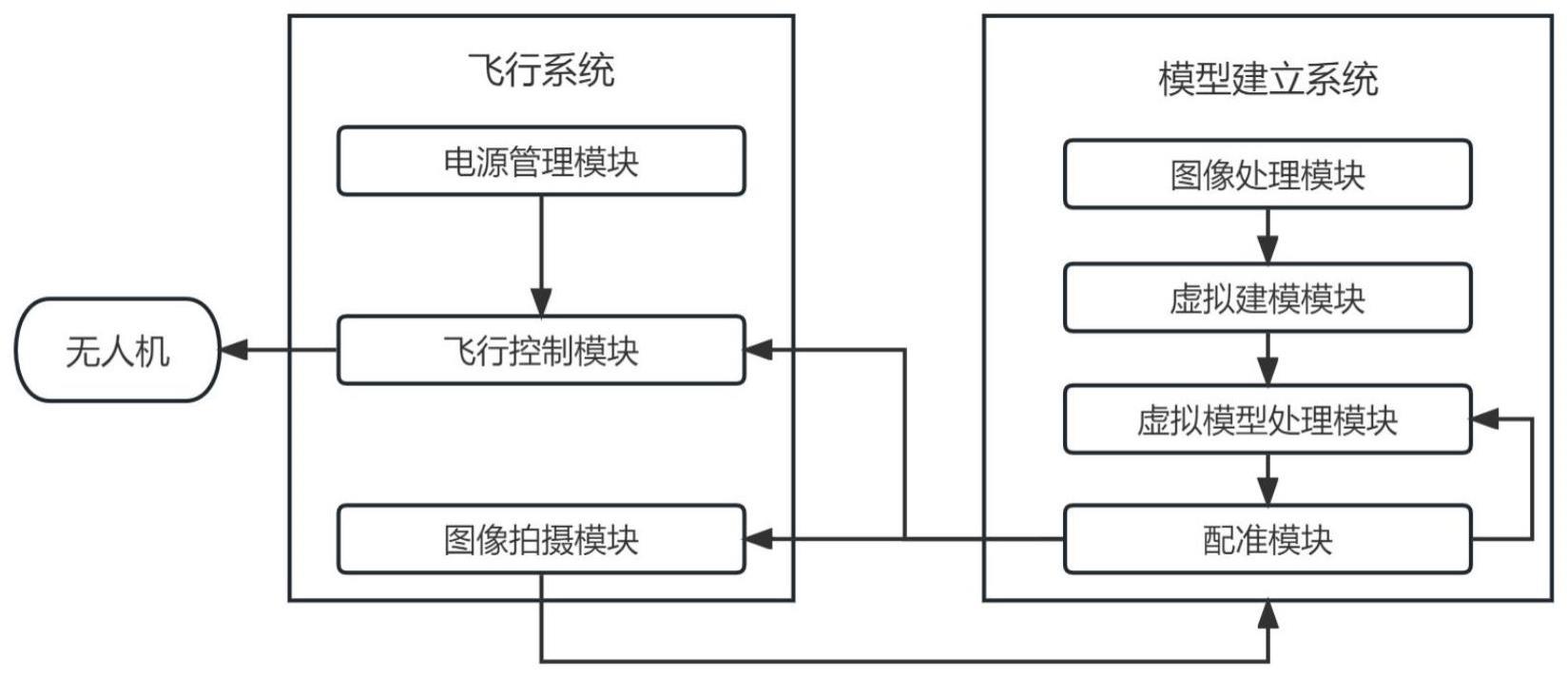
3、基于无人机航拍影像数据的实时三维建模系统,包括飞行系统和模型建立系统,所述飞行系统包括电源管理模块、飞行控制模块和图像拍摄模块,所述模型建立系统包括图像处理模块、虚拟建模模块、虚拟模型处理模块和配准模块,所述电源管理模块输出端与飞行控制模块输入端连接,所述飞行控制模块输出端与无人机连接,所述图像拍摄模块输出端与模型建立系统连接,所述图像处理模块输出端与虚拟建模模块输入端连接,所述虚拟建模模块输出端与虚拟模型处理模块输入端连接,所述虚拟模型处理模块与配准模块双向连接,所述配准模块输出端分别与飞行控制模块和图像拍摄模块的输入端连接。
4、本发明的目的及解决其技术问题还可采用以下技术措施进一步实现。
5、进一步地,所述电源管理模块包括电源检测单元和运行预测单元;
6、所述电源检测单元检测无人机电池的电量余量,变换无人机的用电模式;
7、所述运行预测单元根据无人机的用电模式,结合无人机电池的电量余量,预测无人机在该用电模式下的可用行程,并发送可用行程数据至飞行控制模块。
8、进一步地,所述飞行控制模块包括轨迹分布单元、拍摄定点分布单元和无人机控制器;
9、所述轨迹分布单元接收可用行程数据,从互联网地图数据中接收该区域的空间数据,计算符合续航的最优飞行轨迹;
10、所述拍摄定点分布单元根据飞行轨迹,设定拍摄空间点;
11、所述无人机控制器根据飞行轨迹与拍摄空间点,控制无人机沿着飞行轨迹进行飞行,并根据拍摄空间点进行图像拍摄。
12、进一步地,所述图像拍摄模块包括空间图像拍摄单元、空间图像整合单元和拍摄模式调整单元;
13、所述空间图像拍摄单元在无人机到达拍摄空间点时控制无人机进行拍摄工作,得到实时图像;
14、所述空间图像整合单元将若干同一个拍摄空间点的实时图像进行整合,进行叠加、像素替换;
15、所述拍摄模式调整单元根据需求,自动控制无人机摄像机组的拍摄模式。
16、进一步地,所述图像处理模块包括图像转化单元、图像分析单元和空间数据调整单元;
17、所述图像转化单元将完整图像进行转化,使其转化为线条图形;
18、所述图像分析单元对空间数据与图像转化单元生成的线条图形进行分析;
19、所述空间数据调整单元将图像空间数据进行整齐化调整,使同一空间轴内的数据同轴化;
20、进一步地,所述虚拟建模模块包括数据转化单元、虚拟模型建立单元、虚拟模型检测单元和虚拟模型修正单元;
21、所述数据转化单元接收规整数据,对规整数据进行转化,转化得到虚拟模型数据;
22、所述虚拟模型建立单元根据虚拟模型数据,建立初步虚拟模型;
23、所述虚拟模型检测单元对初步虚拟模型进行检测,检测其完整度,得到完整度判断;
24、所述虚拟模型修正单元将缺失的初步虚拟模型进行修正后得到完整虚拟模型;
25、进一步地,所述虚拟模型处理模块包括虚拟模型细化单元、虚拟模型实时更新单元和虚拟模型可视化单元;
26、所述虚拟模型细化单元根据模型完整性报告,将完整虚拟模型进行细化;
27、所述虚拟模型实时更新单元对细化模型进行实时更正;
28、所述虚拟模型可视化单元将更正虚拟模型进行实时可视化在显示设备中,或直接生成可视化模型文件进行保存。
29、进一步地,所述配准模块包括模型图像配准单元和配准结果分析单元;
30、所述模型图像配准单元将更正虚拟模型与完整图像进行配准,得到配准模型与配准结果;
31、所述配准结果分析单元根据配准结果,从图像拍摄、拍摄路径和模型完整性三个方面进行分析;
32、基于无人机航拍影像数据的实时三维建模方法:其步骤包括:
33、s1、由电源管理模块对无人机的电池进行起飞前的检测,预测无人机的可用行程,并发送预测的可用行程数据至飞行控制模块;
34、s2、飞行控制模块根据预测的可用行程数据,基于互联网地图数据生成无人机的预定飞行轨迹,并根据该飞行轨迹,分布拍摄点;
35、s3、载入飞行轨迹与拍摄点数据,启动无人机进行起飞,使无人机到达预定飞行轨迹的起点,并预先调整其在每个拍摄点的拍摄图像数量与录像时长,开始进行扫描式拍摄;
36、s4、通过图像拍摄模块对无人机所拍摄得到的实时图像与实时录像进行整合,进行叠加与像素替换工作,使得实时图像与实时录像中存在的阴影部分被替换为建模参照物的原材质图像,输出完整的无阴影的完整图像,并传输至模型建立系统进行虚拟模型的建立;
37、s5、由图像处理模块对完整图像进行转化,使其转化为线条图形,并基于线条图形的透视程度与空间轴进行计算并匹配,输出完整图像对应的图像空间数据,将图像空间数据进行数据同轴化,使其规整化,并传输至虚拟建模模块进行初步虚拟模型的建立;
38、s6、由虚拟建模模块对规整数据进行转化为虚拟模型数据,进行三维模型的初步建立,建立的初步模型进行完整度检测,将完整的初步虚拟模型传输至虚拟模型处理模块,将缺失的初步虚拟模型进行修正,同时修正与缺失的初步虚拟模型对应的虚拟模型数据;
39、s7、利用虚拟模型处理模块对初步虚拟模型进行进一步精细化,包括对模型的材质铁壶、虚拟环境进行细化,同时调整模型的参数,将结果细化的虚拟模型参数至配准模块进行配准,同时可以将虚拟模型进行可视化;
40、s8、配准模块将更正虚拟模型与完整图像进行配准,配准模型应当在配准度高于95%时才可输出为配准模型,配准模块输出配准结果与配准模型;
41、s9、将配准结果从图像拍摄、拍摄路径和模型完整性三个方面进行分析,得到图像拍摄缺陷报告、拍摄路径缺陷报告和模型完整性报告,将图像拍摄缺陷报告传输至图像拍摄模块,将拍摄路径缺陷报告传输至飞行控制模块,将模型完整性报告传输至虚拟模型处理模块;
42、图像拍摄模块根据图像拍摄缺陷报告对拍摄模式或拍摄参数进行修正;
43、飞行控制模块根据拍摄路径缺陷报告进行预定飞行路径的修正;
44、虚拟模型处理模块根据模型完整性报告,对完整虚拟模型数据进行细化步骤的修正。
45、本发明相比现有技术,具有以下有益效果:
46、(1)本发明通过设置虚拟建模模块与虚拟模型处理模块,利用虚拟建模模块可以实现根据实时图像实时建立虚拟模型,并由虚拟模型处理模块对初步虚拟模型进行多方面处理,在模型存在缺失时,可以对其进行修正,并分析缺失原因,以便后续进一步提高虚拟模型的完整性和准确性,虚拟模型处理模块还可以通过实时更新单元对细化模型进行实时更正,包括材质贴图、虚拟环境等,使得虚拟模型能够及时反映真实环境的变化,能够提高虚拟建模的效率和准确性;
47、(2)通过设置配准模块,将更正虚拟模型与完整图像进行配准,确保配准度高于95%时才输出为配准模型,提高配准的准确性和有效性,确保虚拟模型与真实环境的拟合度更高,并从图像拍摄、拍摄路径和模型完整性三个方面进行分析,根据配准结果,生成缺陷报告,并根据反馈对对图像拍摄质量、拍摄路径和模型完整性进行相应的改进和修正,进一步优化图像拍摄、飞行控制和虚拟模型处理等环节,提高整体系统的性能和效果,实现更全面的数据反馈和交互,解决了航拍过程中拍摄的图像数据往往存在遗漏,从而导致建模结果不准确的问题,具有较好的应用前景和多方面的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!