车辆可行驶区域检测方法、相关装置及存储介质与流程
本技术实施例涉及计算机视觉,尤其涉及一种车辆可行驶区域检测方法、相关装置及存储介质。
背景技术:
1、在自动泊车场景,需要进行高精度的可行驶区域检测,目前主流检测方式包括:基于超声波检测方式、基于视觉或者超声波雷达融合检测方式,基于雷达检测方式(例如毫米波雷达、激光雷达检测)等。
2、对于基于视觉或者超声波雷达融合检测方式而言,该检测方式采用深度学习算法,通常需要人工对训练数据中的障碍物进行标注,并基于人工标注的训练数据训练可行驶区域和不可行驶区域的特征,再根据颜色、纹理、边缘等特征信息对路面和障碍物进行分离。虽然精度较高,但是,由于该检测方式的探测距离远,所以前期需要投入大量的人工采集样本,且推理过程对芯片算力要求高,实时性较难保证,另外对环境光照要求较高,场景鲁棒性受限。
技术实现思路
1、本技术实施例提供了一种车辆可行驶区域检测方法、相关装置及存储介质,能够提高在自动泊车场景下,对可行驶区域、不可行驶区域的检测精度、检测有效性,有效缩小检测结果距离真实的可行驶区域的偏差,以避免发生实际不可行驶区域被误判为可行驶区域的情形,采用本方案能够有效避免由于检测结果精准度较低导致对后期车位检测和泊车路径规划带来的不利影响。
2、第一方面,本技术实施例从车载装置角度提供一种车辆可行驶区域检测方法,该方法包括:
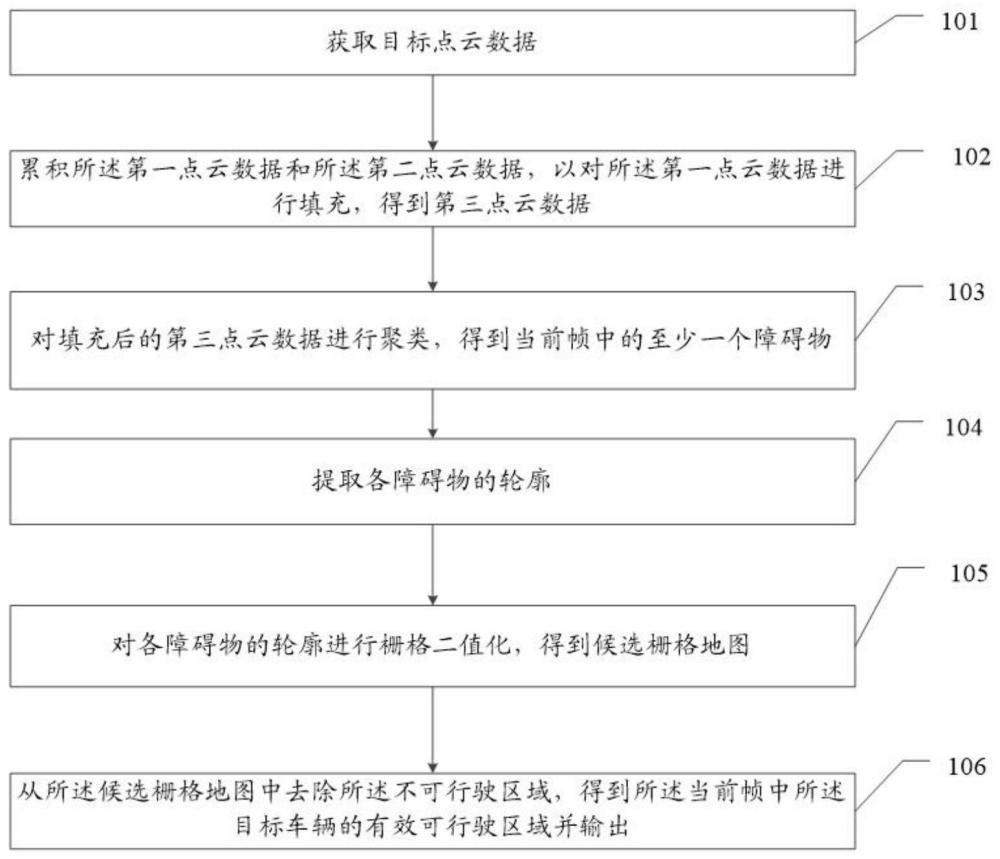
3、获取目标点云数据,所述目标点云数据包括当前帧的第一点云数据、预设时间窗口内历史帧的第二点云数据,所述当前帧为安装于目标车辆的雷达探测的可行驶区域的图像,所述目标点云数据包括所述雷达探测的点云集合;
4、累积所述第一点云数据和所述第二点云数据,以对所述第一点云数据进行填充,得到第三点云数据;
5、对填充后的第三点云数据进行聚类,得到所述当前帧中的至少一个障碍物,每个障碍物覆盖至少一个点云;
6、提取各障碍物的轮廓;
7、对各障碍物的轮廓进行栅格二值化,得到候选栅格地图,所述候选栅格地图包括对应当前帧中所述目标车辆的可行驶区域和不可行驶区域;
8、从所述候选栅格地图中去除所述不可行驶区域,得到所述当前帧中所述目标车辆的有效可行驶区域并输出。
9、一些实施方式中,所述历史帧包括所述预设时间窗口内任意的第一帧和第二帧,所述第一帧的时间戳早于所述第二帧,所述第一帧为所述第二帧进行点云累积中时间戳最早的一帧;
10、所述累积所述第一点云数据和所述第二点云数据,以对所述第一点云数据进行填充,得到第三点云数据,包括:
11、获取当前帧对应的目标车辆的实时车速和帧周期;
12、从所述第二点云数据中获取所述第二帧的点云累积结果,从所述第二帧的点云累积结果中的最早时间戳的第一帧的点云数据;
13、根据所述实时车速和帧周期,对当前帧进行运动补偿,并填充至当前帧的第一点云数据,以得到所述第三点云数据。
14、一些实施方式中,所述根据各障碍物的轮廓进行栅格二值化,得到候选栅格地图,包括:
15、计算各障碍物的轮廓所对应的边缘点云的连线方程,边缘点云之间的每条连线li表示为斜率ki、截距bi、最小纵向坐标yimin、最大纵向坐标yimax的组合;
16、按照栅格颗粒度,遍历各栅格中心点的纵向坐标yn,计算纵向坐标为yn时各连线li的交点横向坐标xni,对每个栅格中心点纵向坐标yn分配多个交点横向坐标xnj,其中,j=1,2,…;
17、按照栅格颗粒度,遍历各栅格中心点的纵向坐标yn下的所有栅格,并按从左到右的扫描顺序,若确定最左侧栅格中心点位于障碍物的轮廓区域外,则赋值1,若确定最左侧栅格中心点位于障碍物的轮廓区域内,则赋值0;向右扫描栅格并重复赋值,扫描期间每遇到一处交点横向坐标xnj,则执行一次取反操作,直至对所有栅格完成赋值,得到所述可行驶区域和所述不可行驶区域。
18、一些实施方式中,所述从所述候选栅格地图中去除所述不可行驶区域,得到所述当前帧中所述目标车辆的有效可行驶区域,包括:
19、依次扫描所述候选栅格地图中的每一横排栅格gyi,找出所有连通的第一连续栅格;
20、依次扫描所述候选栅格地图中的每一纵列栅格gxi,找出连通的第二连续栅格;
21、根据所述第一连续栅格和所述第二连续栅格得到所述有效可行驶区域。
22、一些实施方式中,在对填充后的第三点云数据进行聚类之后,在提取各障碍物的轮廓之前,所述方法还包括:
23、从所述第三点云中,选择高度在所述目标车辆底盘和所述目标车辆总高之间的点云,删除无效点云,以得到构成实际障碍物的有效点云。
24、一些实施方式中,所述第三点云或者所述有效点云投影于地面的点云坐标设为pi(xi,yi);在对填充后的第三点云数据进行聚类之后,在提取各障碍物的轮廓之前,所述方法还包括:
25、设置安全距离δ;
26、基于所述安全距离对所述第三点云或者所述有效点云进行平面扩展,使得投影在地面的每个点云坐标pi(xi,yi)均被目标点云替代,所述目标点云包括以下项中的至少一项:
27、pi1(xi+δ,yi+δ)、pi2(xi-δ,yi+δ)、pi3(xi-δ,yi-δ)、以及pi4(xi+δ,yi-δ)。
28、一些实施方式中,在获取目标车辆的点云数据之前,所述方法还包括:
29、确定所述雷达的探测距离和栅格颗粒度;
30、根据所述探测距离和所述栅格颗粒度建立所述目标车辆的栅格地图,所述雷达的探测范围覆盖所述栅格地图。
31、第二方面,本技术实施例提供一种车载装置,具有实现对应于上述第一方面提供的车辆可行驶区域检测方法的功能。功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,模块可以是软件和/或硬件。
32、一些实施方式中,所述车载装置包括:
33、输入输出模块,用于获取目标点云数据,所述目标点云数据包括当前帧的第一点云数据、预设时间窗口内历史帧的第二点云数据,所述当前帧为安装于目标车辆的雷达探测的可行驶区域的图像,所述目标点云数据包括所述雷达探测的点云集合;
34、处理模块,用于累积所述第一点云数据和所述第二点云数据,以对所述第一点云数据进行填充,得到第三点云数据;
35、对填充后的第三点云数据进行聚类,得到所述当前帧中的至少一个障碍物,每个障碍物覆盖至少一个点云;
36、提取各障碍物的轮廓;
37、对各障碍物的轮廓进行栅格二值化,得到候选栅格地图,所述候选栅格地图包括对应当前帧中所述目标车辆的可行驶区域和不可行驶区域;
38、从所述候选栅格地图中去除所述不可行驶区域,得到所述当前帧中所述目标车辆的有效可行驶区域并通过所述输入输出模块输出。
39、一些实施方式中,所述历史帧包括所述预设时间窗口内任意的第一帧和第二帧,所述第一帧的时间戳早于所述第二帧,所述第一帧为所述第二帧进行点云累积中时间戳最早的一帧;
40、所述处理模块具体用于:
41、获取当前帧对应的目标车辆的实时车速和帧周期;
42、从所述第二点云数据中获取所述第二帧的点云累积结果,从所述第二帧的点云累积结果中的最早时间戳的第一帧的点云数据;
43、根据所述实时车速和帧周期,对当前帧进行运动补偿,并填充至当前帧的第一点云数据,以得到所述第三点云数据。
44、一些实施方式中,所述处理模块具体用于:
45、计算各障碍物的轮廓所对应的边缘点云的连线方程,边缘点云之间的每条连线li表示为斜率ki、截距bi、最小纵向坐标yimin、最大纵向坐标yimax的组合;
46、按照栅格颗粒度,遍历各栅格中心点的纵向坐标yn,计算纵向坐标为yn时各连线li的交点横向坐标xni,对每个栅格中心点纵向坐标yn分配多个交点横向坐标xnj,其中,j=1,2,…;
47、按照栅格颗粒度,遍历各栅格中心点的纵向坐标yn下的所有栅格,并按从左到右的扫描顺序,若确定最左侧栅格中心点位于障碍物的轮廓区域外,则赋值1,若确定最左侧栅格中心点位于障碍物的轮廓区域内,则赋值0;向右扫描栅格并重复赋值,扫描期间每遇到一处交点横向坐标xnj,则执行一次取反操作,直至对所有栅格完成赋值,得到所述可行驶区域和所述不可行驶区域。
48、一些实施方式中,所述处理模块具体用于:
49、依次扫描所述候选栅格地图中的每一横排栅格gyi,找出所有连通的第一连续栅格;
50、依次扫描所述候选栅格地图中的每一纵列栅格gxi,找出连通的第二连续栅格;
51、根据所述第一连续栅格和所述第二连续栅格得到所述有效可行驶区域。
52、一些实施方式中,所述处理模块在对填充后的第三点云数据进行聚类之后,在提取各障碍物的轮廓之前,还用于:
53、从所述第三点云中,选择高度在所述目标车辆底盘和所述目标车辆总高之间的点云,删除无效点云,以得到构成实际障碍物的有效点云。
54、一些实施方式中,所述第三点云或者所述有效点云投影于地面的点云坐标设为pi(xi,yi);在对填充后的第三点云数据进行聚类之后,在提取各障碍物的轮廓之前,所述方法还包括:
55、设置安全距离δ;
56、基于所述安全距离对所述第三点云或者所述有效点云进行平面扩展,使得投影在地面的每个点云坐标pi(xi,yi)均被目标点云替代,所述目标点云包括以下项中的至少一项:
57、pi1(xi+δ,yi+δ)、pi2(xi-δ,yi+δ)、pi3(xi-δ,yi-δ)、以及pi4(xi+δ,yi-δ)。
58、一些实施方式中,所述处理模块在获取目标车辆的点云数据之前,还用于:
59、确定所述雷达的探测距离和栅格颗粒度;
60、根据所述探测距离和所述栅格颗粒度建立所述目标车辆的栅格地图,所述雷达的探测范围覆盖所述栅格地图。
61、第三方面,本技术实施例提供一种人脸车载装置,所述人脸车载装置包括:至少一个处理器和存储器;其中,所述存储器用于存储计算机程序,所述处理器用于调用所述存储器中存储的计算机程序来执行上述第一方面、第一方面的任一种实施方式中的步骤。
62、第四方面,本技术实施例提供一种计算机可读存储介质,具有实现对应于上述第一方面提供的车辆可行驶区域检测方法的功能。所述功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,所述模块可以是软件和/或硬件。具体的,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本技术实施例中第一方面、第一方面的任一种实施方式中的步骤。
63、相较于现有技术,本技术实施例提供的方案中,先获取目标点云数据,其包括当前帧的第一点云数据、预设时间窗口内历史帧的第二点云数据;再累积第一点云数据和第二点云数据,以对第一点云数据进行填充,得到第三点云数据;对填充后的第三点云数据进行聚类,得到当前帧中的至少一个障碍物;对提取的各障碍物的轮廓进行栅格二值化,得到候选栅格地图,从候选栅格地图中去除不可行驶区域,得到当前帧中目标车辆的有效可行驶区域并输出。由于边缘检测采用累积点云的目标级检测,取代点云级检测,准确性更高,能够提高在自动泊车场景下,对可行驶区域、不可行驶区域的检测精度、检测有效性,有效缩小检测结果距离真实的可行驶区域的偏差,以避免发生实际不可行驶区域被误判为可行驶区域的情形,采用本方案能够有效避免由于检测结果精准度较低导致对后期车位检测和泊车路径规划带来的不利影响。
- 还没有人留言评论。精彩留言会获得点赞!