外参评价方法、装置、电子设备和存储介质与流程
本申请涉及视觉传感器,尤其涉及一种外参评价方法、装置、电子设备和存储介质。
背景技术:
1、视觉传感器在机器人、在线检测、工业探伤、自动驾驶等领域的应用越来越广泛,例如视觉传感器可以捕获图像并对该图像进行分析处理,进而实现对图像中的目标对象进行检测、定位等。
2、为了实现上述的技术,通常需要对视觉传感器参数进行标定。视觉传感器参数包括视觉传感器的内参、外参,视觉传感器的内参描述了视觉传感器本身的固有属性,视觉传感器的外参描述了视觉传感器在三维场景中的位置和朝向,其中,外参可以表征视觉坐标系与指定的世界坐标系(或称全局坐标系)之间的坐标变换关系。
3、在不明确外参标定质量的情况下使用外参,若出现外参标定不佳,则很可能会导致视觉传感器的应用效果不佳。因此,还需要一种可以对外参进行评价的技术。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种外参评价方法、装置、电子设备和存储介质,能够从角度层面对外参进行评价。
2、本申请第一方面提供一种外参评价方法,所述方法包括:
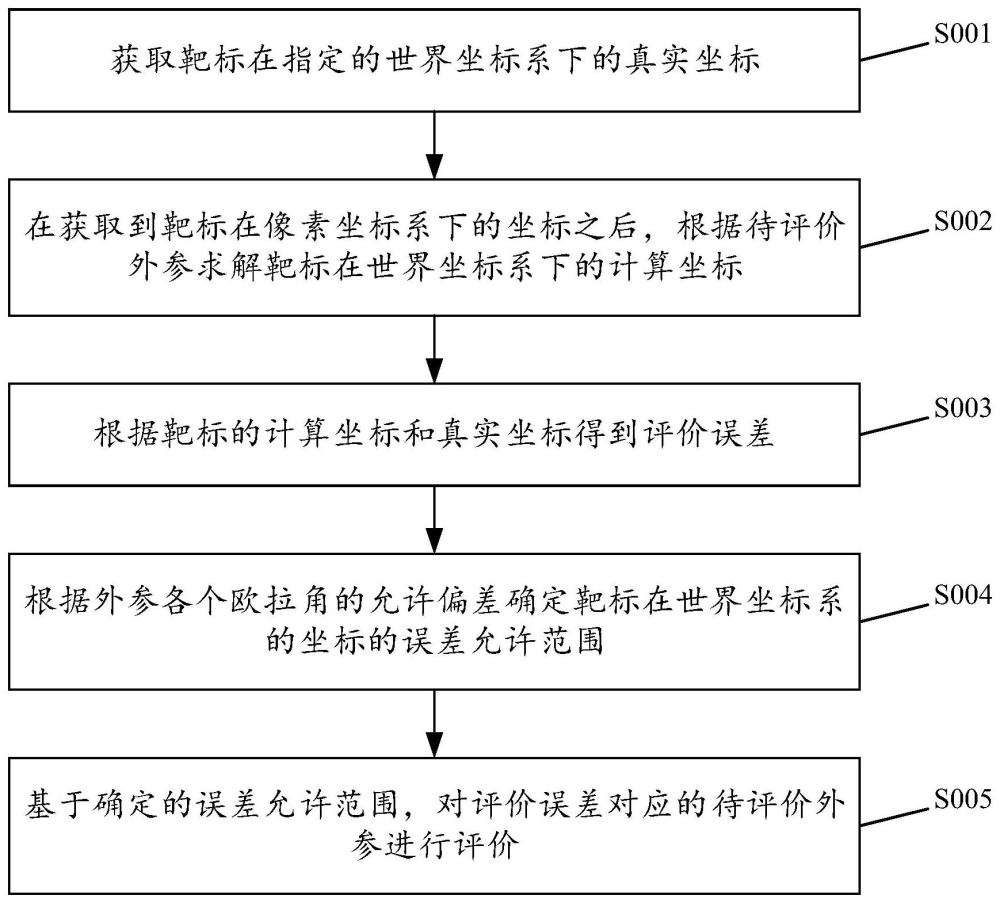
3、获取靶标在指定的世界坐标系下的真实坐标;
4、在获取到所述靶标在像素坐标系下的坐标之后,根据待评价外参求解所述靶标在世界坐标系下的计算坐标;
5、根据所述靶标的计算坐标和真实坐标得到评价误差;
6、根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围;
7、基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价。
8、在一可选的实施方式中,所述获取靶标在指定的世界坐标系下的真实坐标,包括:
9、使用测量工具对在设定位置布置的所述靶标进行测量,得到所述靶标在世界坐标系的真实坐标。
10、在一可选的实施方式中,所述根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围,包括:
11、以欧拉角为零作基准,根据各个欧拉角的设定阈值确定各个欧拉角的角度范围,以及根据各个欧拉角的允许偏差设置三维滑窗,其中,允许的上偏差小于所述阈值的上限;
12、使用所述三维滑窗按照设定步长遍历各个欧拉角,其中,所述三维滑窗每滑动一次,得到一个所述真实坐标的目标误差e;
13、从得到的所有所述目标误差e中选择模长最大的误差向量emax和模长最小的误差向量emin,作为所述真实坐标的误差允许极限。
14、在一可选的实施方式中,所述得到一个所述真实坐标的目标误差e,包括:
15、根据所述三维滑窗的当前位置,确定所述靶标在世界坐标系的第一坐标集合,以及当前三维滑窗中值对应的参考坐标;
16、计算所述第一坐标集合中的元素相对于所述参考坐标的误差向量,并在计算得到的所有误差向量中选择与所述评价误差方向相同的误差向量;
17、从选择的误差向量中选取模长最大的误差向量作为所述目标误差e。
18、在一可选的实施方式中,所述基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价,包括:
19、比较所述评价误差与所述误差向量emax、所述误差向量emin的模长;
20、若所述评价误差的模长小于或等于所述误差向量emin的模长,则所述待评价外参满足精度要求;
21、若所述评价误差的模长大于所述误差向量emin的模长,且小于或等于所述误差向量emax的模长,则所述待评价外参可能满足精度要求;
22、若所述评价误差的模长大于所述误差向量emax的模长,则所述待评价外参不满足精度要求。
23、在一可选的实施方式中,所述根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围,包括:
24、以所述待评价外参的欧拉角为基准,根据各个欧拉角的允许偏差得到相应欧拉角的角度范围;
25、根据得到的角度范围确定所述靶标在世界坐标系的第二坐标集合;
26、计算所述第二坐标集合中的元素相对于所述计算坐标的误差向量,作为所述计算坐标的误差允许范围。
27、在一可选的实施方式中,所述基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价,包括:
28、判断所述计算坐标的误差允许范围中是否存在所述评价误差的相反向量,若是,则所述待评价外参满足精度要求,否则不满足。
29、本申请第二方面提供一种外参评价装置,所述装置包括:
30、真实坐标获取模块,其被配置为获取靶标在指定的世界坐标系下的真实坐标;
31、计算坐标求解模块,其被配置为在获取到所述靶标在像素坐标系下的坐标之后,根据待评价外参求解所述靶标在世界坐标系下的计算坐标;
32、评价误差得到模块,其被配置为根据所述靶标的计算坐标和真实坐标得到评价误差;
33、允许误差确定模块,其被配置为根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围;
34、外参评价模块,其被配置为基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价。
35、本申请第三方面提供一种电子设备,包括:
36、处理器;以及
37、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
38、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
39、本申请提供的技术方案可以包括以下有益效果:
40、本申请的技术方案,先根据靶标在指定的世界坐标系下的计算坐标和真实坐标得到评价误差,再根据外参旋转矩阵中的三个欧拉角的允许偏差映射确定靶标在世界坐标系下的坐标的误差允许范围,最后结合确定的误差允许范围对评价误差对应的待评价外参进行评价。本申请将靶标在像素坐标系的二维坐标逆投影至三维空间得到计算坐标,并与真实坐标相较来确定评价误差,结合外参旋转矩阵中的欧拉角pitch、roll和yaw来对传感器外参的精度进行评价。
41、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种外参评价方法,其特征在于,所述方法包括:
2.根据权利要求1所述的外参评价方法,其特征在于,所述获取靶标在指定的世界坐标系下的真实坐标,包括:
3.根据权利要求1所述的外参评价方法,其特征在于,所述根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围,包括:
4.根据权利要求3所述的外参评价方法,其特征在于,所述得到一个所述真实坐标的目标误差e,包括:
5.根据权利要求3所述的外参评价方法,其特征在于,所述基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价,包括:
6.根据权利要求1所述的外参评价方法,其特征在于,所述根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围,包括:
7.根据权利要求6所述的外参评价方法,其特征在于,所述基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价,包括:
8.一种外参评价装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1至7中任一项所述的方法。
技术总结
本申请涉及一种外参评价方法、装置、电子设备和存储介质。所述方法包括:获取靶标在指定的世界坐标系下的真实坐标;在获取到所述靶标在像素坐标系下的坐标之后,根据待评价外参求解所述靶标在世界坐标系下的计算坐标;根据所述靶标的计算坐标和真实坐标得到评价误差;根据外参各个欧拉角的允许偏差确定所述靶标在世界坐标系的坐标的误差允许范围;基于确定的误差允许范围,对所述评价误差对应的待评价外参进行评价。本申请提供的方案,能够从角度层面对外参进行评价。
技术研发人员:黄强,张明达,邹枘珂
受保护的技术使用者:广州小鹏自动驾驶科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!